Vous aimerez peut-être aussi
- 10 5923 J Aerospace 20130203 02Document21 pages10 5923 J Aerospace 20130203 02Nebiyu TenayePas encore d'évaluation
- Distance Elements Linking Theory With TestingDocument20 pagesDistance Elements Linking Theory With TestingAbraham TorresPas encore d'évaluation
- Paper - (JBE) Optimal Tracking Controller Design For A Small Scale Helicopter - A Budiyono, Singgih S Wibowo - 2007Document10 pagesPaper - (JBE) Optimal Tracking Controller Design For A Small Scale Helicopter - A Budiyono, Singgih S Wibowo - 2007Singgih Satrio WibowoPas encore d'évaluation
- Identification of Gyroplane Lateral/directional Stability and Control Characteristics From Flight TestDocument15 pagesIdentification of Gyroplane Lateral/directional Stability and Control Characteristics From Flight TestYhoanColmenaresPas encore d'évaluation
- Identification of Gyroplane Lateral/directional Stability and Control Characteristics From Flight TestDocument15 pagesIdentification of Gyroplane Lateral/directional Stability and Control Characteristics From Flight TestYhoanColmenaresPas encore d'évaluation
- A Feedback Theory of Two-Degree-of-Freedom Wiener-Hopf DesignDocument14 pagesA Feedback Theory of Two-Degree-of-Freedom Wiener-Hopf DesignLee JamesPas encore d'évaluation
- Friction Compensation A Double Inverted Pendulum: Stons, CT FST, P.ODocument6 pagesFriction Compensation A Double Inverted Pendulum: Stons, CT FST, P.Oمحمد المهندسPas encore d'évaluation
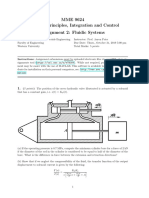
- MME 9624 Actuator Principles, Integration and Control Assignment 2: Fluidic SystemsDocument2 pagesMME 9624 Actuator Principles, Integration and Control Assignment 2: Fluidic SystemsKamal PatelPas encore d'évaluation
- Model Based Design and Experimental Validation of Electro-Mechanic Actuator Systems For A Nose Landing GearDocument10 pagesModel Based Design and Experimental Validation of Electro-Mechanic Actuator Systems For A Nose Landing GearmailrahultanwarPas encore d'évaluation
- Ijeir 905 FinalDocument5 pagesIjeir 905 Finalvarun karthikeyanPas encore d'évaluation
- A Linear Programming Approach To Shipboard Electrical System ModelingDocument9 pagesA Linear Programming Approach To Shipboard Electrical System ModelingShajahan ShagulPas encore d'évaluation
- AIAA-92-2097-CP: Flutter Suppression THE Active Flexible Wing: Control Design and Experimental ValidationDocument9 pagesAIAA-92-2097-CP: Flutter Suppression THE Active Flexible Wing: Control Design and Experimental Validationmepramod1984Pas encore d'évaluation
- Longitudinal Control of A Fixed Wing UavDocument7 pagesLongitudinal Control of A Fixed Wing UavdavidPas encore d'évaluation
- Robust Real-Time Control of A Two-Rotor Aerodynamic SystemDocument6 pagesRobust Real-Time Control of A Two-Rotor Aerodynamic SystemsaeedPas encore d'évaluation
- Ijsetr Vol 7 Issue 7 467 472Document6 pagesIjsetr Vol 7 Issue 7 467 472Dana Chalyng'sPas encore d'évaluation
- Modelling and Recursive Power Control of Horizontal Variable Speed Wind TurbinesDocument9 pagesModelling and Recursive Power Control of Horizontal Variable Speed Wind TurbinesBogdan TucaliucPas encore d'évaluation
- 16 Stochastic Control AppliedDocument6 pages16 Stochastic Control AppliedveepekayPas encore d'évaluation
- An Engineering Approach in Modeling Overvoltage Effects On Wind Parks Caused by Travelling WavesDocument5 pagesAn Engineering Approach in Modeling Overvoltage Effects On Wind Parks Caused by Travelling WavesLuis José RodríguezPas encore d'évaluation
- Simulation of A Compressor Cascade With Stalled Flow Using Large Eddy Simulation With Two Layer Approximate Boundary ConditionsDocument15 pagesSimulation of A Compressor Cascade With Stalled Flow Using Large Eddy Simulation With Two Layer Approximate Boundary ConditionsChristopherGunawanPas encore d'évaluation
- Fractional-Order Control: Theory and Applications in Motion ControlDocument11 pagesFractional-Order Control: Theory and Applications in Motion ControlslvasPas encore d'évaluation
- Mapps 1984Document4 pagesMapps 198446k2dgs2sjPas encore d'évaluation
- Aerodynamics PDFDocument128 pagesAerodynamics PDFsmashfaqashrafPas encore d'évaluation
- Castelliz 1974Document8 pagesCastelliz 1974Soledad AceitunoPas encore d'évaluation
- Body Freedom Flutter of A Blended Wing Body ModelDocument5 pagesBody Freedom Flutter of A Blended Wing Body ModelFraPas encore d'évaluation
- Induced Drag Reduction Using Multiple Winglets, Looking Beyond The Prandtl-Munk Linear ModelDocument21 pagesInduced Drag Reduction Using Multiple Winglets, Looking Beyond The Prandtl-Munk Linear ModelBlas CaramutoPas encore d'évaluation
- Copy Ball and Beam Report XDXDDocument5 pagesCopy Ball and Beam Report XDXDEdu AguirrePas encore d'évaluation
- Aeroservoelastic Modeling, Analysis, and Design Techniques PDFDocument12 pagesAeroservoelastic Modeling, Analysis, and Design Techniques PDFkarthekeyanmenonPas encore d'évaluation
- Design and Analysis Trends of Helicopter Rotor SystemsDocument40 pagesDesign and Analysis Trends of Helicopter Rotor SystemsHasan ÖzgenPas encore d'évaluation
- ActuatorDocument13 pagesActuatorAsnide ArmadaPas encore d'évaluation
- Synthesis and Analysis of Robust Flux Observers For Induction MachinesDocument6 pagesSynthesis and Analysis of Robust Flux Observers For Induction MachinesOussamaDzPas encore d'évaluation
- Stress Analysis Aileron PDFDocument8 pagesStress Analysis Aileron PDFNarendra PalandePas encore d'évaluation
- Flight Control Design Using BacksteppingDocument8 pagesFlight Control Design Using BacksteppinggarridolopezPas encore d'évaluation
- 1 s2.0 S0142727X10001190 MainDocument9 pages1 s2.0 S0142727X10001190 MainMuhammad Irfan Bin RuslanPas encore d'évaluation
- W5D-2 2Document13 pagesW5D-2 2madaoPas encore d'évaluation
- Control of A Two-Load-Path Trimmable Horizontal Stabilizer Actuator of An Aircraft - Comparison of Design ApproachesDocument6 pagesControl of A Two-Load-Path Trimmable Horizontal Stabilizer Actuator of An Aircraft - Comparison of Design ApproachesCrateFXPas encore d'évaluation
- Magnitude Symetric Optimum CriterionDocument9 pagesMagnitude Symetric Optimum CriterionasuhuanePas encore d'évaluation
- Date: 16/07/2016: Bo Are The MomentDocument35 pagesDate: 16/07/2016: Bo Are The MomentAurongo NasirPas encore d'évaluation
- Ngineering Otes: Exponential Stability of A Path-Following AlgorithmDocument7 pagesNgineering Otes: Exponential Stability of A Path-Following AlgorithmSaurabh SharmaPas encore d'évaluation
- Airflow Over An Ahmed Body: Created in COMSOL Multiphysics 5.4Document28 pagesAirflow Over An Ahmed Body: Created in COMSOL Multiphysics 5.4Eren ÖzataPas encore d'évaluation
- Dtic Adp010475Document10 pagesDtic Adp010475rasPas encore d'évaluation
- Development of An ROV Operated Both As Towed and Self-Propulsive VehicleDocument43 pagesDevelopment of An ROV Operated Both As Towed and Self-Propulsive VehicleAntonio Carlos Bana ChiellaPas encore d'évaluation
- Montagner 2009Document4 pagesMontagner 2009Junaid AkhtarPas encore d'évaluation
- Accounting of DC DC Power Converter Dynamics in DC Motor Velocity Adaptive ControlDocument7 pagesAccounting of DC DC Power Converter Dynamics in DC Motor Velocity Adaptive ControlFinito TheEndPas encore d'évaluation
- Helicopter Rotor Airloads Unsteady AerodynamicsDocument14 pagesHelicopter Rotor Airloads Unsteady AerodynamicsDaniel BackPas encore d'évaluation
- Jury1964 PDFDocument7 pagesJury1964 PDF张明Pas encore d'évaluation
- 1990 - Inoue - Practical Repetitive Control System Design PDFDocument6 pages1990 - Inoue - Practical Repetitive Control System Design PDFAyman IsmailPas encore d'évaluation
- Research Article: Nonlinear Dynamic Model-Based Adaptive Control of A Solenoid-Valve SystemDocument14 pagesResearch Article: Nonlinear Dynamic Model-Based Adaptive Control of A Solenoid-Valve SystemArrow96Pas encore d'évaluation
- Bank Have Dash IIDocument6 pagesBank Have Dash IIManuel SolisPas encore d'évaluation
- Boonsiri, Journal Manager, 20081302p3 PDFDocument13 pagesBoonsiri, Journal Manager, 20081302p3 PDFPallavi SinhaPas encore d'évaluation
- Simulation of The F18D Falling LeafDocument11 pagesSimulation of The F18D Falling LeafgdudgshsPas encore d'évaluation
- Optimisation ProblemsDocument6 pagesOptimisation ProblemsIon CorbuPas encore d'évaluation
- Modified Linear Quadratic Bumpless TransferDocument5 pagesModified Linear Quadratic Bumpless Transferlie jamesPas encore d'évaluation
- Technical Note: An Analytical Tikeatment OF Aircraft Propeller Precession InstabilityDocument58 pagesTechnical Note: An Analytical Tikeatment OF Aircraft Propeller Precession Instabilityjangum wonogiriPas encore d'évaluation
- Efficient Evaluation of Preliminary Aerodynamic Characteristics of Light Trainer AircraftDocument8 pagesEfficient Evaluation of Preliminary Aerodynamic Characteristics of Light Trainer AircraftSantosa Edy WibowoPas encore d'évaluation
- Open Research Exeter: TitleDocument9 pagesOpen Research Exeter: TitleredwanePas encore d'évaluation
- Autopilot Design For A North American X-15Document7 pagesAutopilot Design For A North American X-15Israel Alejandro Almaguer AcevedoPas encore d'évaluation
- IMMUNE: Control Reallocation After Surface Failures Using Model Predictive ControlDocument6 pagesIMMUNE: Control Reallocation After Surface Failures Using Model Predictive ControlLuis FuentesPas encore d'évaluation
- Khalid 2019Document6 pagesKhalid 2019SERENE SIBYPas encore d'évaluation
- Adaptive LFT Control of A Transport Aircraft On The Lateral AxisDocument7 pagesAdaptive LFT Control of A Transport Aircraft On The Lateral AxisAlex SimizPas encore d'évaluation
- Energetic Processes in Follow-Up Electrical Control Systems: International Series of Monographs on Electronics and InstrumentationD'EverandEnergetic Processes in Follow-Up Electrical Control Systems: International Series of Monographs on Electronics and InstrumentationPas encore d'évaluation
- A Guide To Starting A Career: in Cyber SecurityDocument16 pagesA Guide To Starting A Career: in Cyber SecurityOvidiu Costea100% (2)
- MPM 2Document17 pagesMPM 2Ovidiu CosteaPas encore d'évaluation
- Bird StrikeDocument6 pagesBird StrikeOvidiu CosteaPas encore d'évaluation
- MPM 2Document17 pagesMPM 2Ovidiu CosteaPas encore d'évaluation
- Fow Control Heavy VehiclesDocument13 pagesFow Control Heavy VehiclesOvidiu CosteaPas encore d'évaluation
- !!!!!rongxin Xu Thesis 2012 PDFDocument118 pages!!!!!rongxin Xu Thesis 2012 PDFOvidiu CosteaPas encore d'évaluation
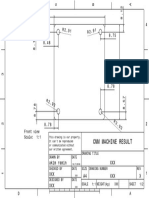
- CMM Machine Result: XXX Akim Ramin A4 XXX X XXXDocument1 pageCMM Machine Result: XXX Akim Ramin A4 XXX X XXXhassPas encore d'évaluation
- Barem Bio v1Document1 pageBarem Bio v1Ovidiu CosteaPas encore d'évaluation
- Psychokinesis Magic Book PDFDocument15 pagesPsychokinesis Magic Book PDFnajlanassar123Pas encore d'évaluation
- Contradictii in BiblieDocument12 pagesContradictii in BiblieMircea PetriucPas encore d'évaluation
- Tao of Jeet Kune Do PDFDocument213 pagesTao of Jeet Kune Do PDFMarius Stefan100% (7)
- Master of Body Language PDFDocument10 pagesMaster of Body Language PDFreversoPas encore d'évaluation
- Chuck Hickok - Mentalism IncorporatedDocument92 pagesChuck Hickok - Mentalism IncorporatedAndrás Kiss100% (2)
- Ben Rayot - Deadly MentalismDocument10 pagesBen Rayot - Deadly Mentalismstefan_stemi4849Pas encore d'évaluation
- (PAPER) Benz T., Schwab R., & Vermeer P. (2009) Small-Strain Stiffness in Geotechnical Analyses (Bautechnik, 86 (S1), 16-27)Document12 pages(PAPER) Benz T., Schwab R., & Vermeer P. (2009) Small-Strain Stiffness in Geotechnical Analyses (Bautechnik, 86 (S1), 16-27)O SPas encore d'évaluation
- Home Exam in FYS2160 - Thermodynamics and Statistical PhysicsDocument3 pagesHome Exam in FYS2160 - Thermodynamics and Statistical Physicspurity89Pas encore d'évaluation
- (E. Böhm-Vitense) Introduction To Stellar AstrophDocument255 pages(E. Böhm-Vitense) Introduction To Stellar AstrophJyoti Prakash100% (1)
- Fundamentals of Applied Dynamics Revised PrintingDocument1 pageFundamentals of Applied Dynamics Revised PrintingMochamad Safarudin0% (3)
- 05a - HORIZONTAL BRACEDocument10 pages05a - HORIZONTAL BRACEShyamontika Choudhury ChakrabartiPas encore d'évaluation
- P 846 Ps 1Document3 pagesP 846 Ps 1betjodaPas encore d'évaluation
- Bee Report1Document5 pagesBee Report1Rajeev kumarPas encore d'évaluation
- Calculation of Fillet WeldsDocument7 pagesCalculation of Fillet WeldsMoonzePas encore d'évaluation
- ME6604-Gas Dynamics and Jet Propulsion PDFDocument12 pagesME6604-Gas Dynamics and Jet Propulsion PDFNANCY JUDITHPas encore d'évaluation
- 2006, Fluent 6.3 Fuel Cell Modules Manual PDFDocument85 pages2006, Fluent 6.3 Fuel Cell Modules Manual PDFEd SilvaPas encore d'évaluation
- Semester 1 Assessment 2009 436-431 Mechanics 4 Unit2 DynamicsDocument4 pagesSemester 1 Assessment 2009 436-431 Mechanics 4 Unit2 DynamicsSon TranPas encore d'évaluation
- Energy and Exergy Analysis of A Simple Gas Turbine Cycle With Wet CompressionDocument11 pagesEnergy and Exergy Analysis of A Simple Gas Turbine Cycle With Wet CompressionKrishnaDuttPandeyKdpPas encore d'évaluation
- Bernard P. Binks, Tommy S. Horozov Colloidal Particles at Liquid Interfaces PDFDocument519 pagesBernard P. Binks, Tommy S. Horozov Colloidal Particles at Liquid Interfaces PDFTanvir Hossain100% (1)
- Aqwa Theory ManualDocument200 pagesAqwa Theory ManualV CafPas encore d'évaluation
- Chapter 11Document61 pagesChapter 11Haziq RoslanPas encore d'évaluation
- List of Books ScribdDocument4 pagesList of Books Scribdkultardeep0% (1)
- ME304 HW4 S 15 SolDocument15 pagesME304 HW4 S 15 SolHoang ManhPas encore d'évaluation
- Chapter 2 - Inverse Trigonometric FunctionsDocument38 pagesChapter 2 - Inverse Trigonometric FunctionsmukunthaPas encore d'évaluation
- Particle Size and Size Distribution of Superabrasive PowdersDocument12 pagesParticle Size and Size Distribution of Superabrasive PowdersjhscribdaccPas encore d'évaluation
- Tga, DTG PDFDocument19 pagesTga, DTG PDFSuresh GoyalPas encore d'évaluation
- Maxwell's Equations: and God Said, "Let There Be Light" and There Was Light ! - GenesisDocument13 pagesMaxwell's Equations: and God Said, "Let There Be Light" and There Was Light ! - GenesisYash KalaPas encore d'évaluation
- 7 - Circular Motion and RotationDocument38 pages7 - Circular Motion and RotationImran SitompulPas encore d'évaluation
- 2nd Quarter Exam Grade8 2017Document2 pages2nd Quarter Exam Grade8 2017Mcjohn RenoPas encore d'évaluation
- Analogy RLC en Mass Spring Dash PotDocument26 pagesAnalogy RLC en Mass Spring Dash Potjef_aernoutsPas encore d'évaluation
- The Nature and Perception of SoundDocument21 pagesThe Nature and Perception of Soundsheila louisePas encore d'évaluation
- UnificationDocument318 pagesUnificationoperationmanagerPas encore d'évaluation
- ANP1 Zeeman EffectDocument12 pagesANP1 Zeeman Effectmdilshadshigri1000Pas encore d'évaluation
- Module 2 Physic Page 3Document10 pagesModule 2 Physic Page 3Elvis MbamaraPas encore d'évaluation
- 02 - SIM DN150 PN160 Valve 2 PDFDocument4 pages02 - SIM DN150 PN160 Valve 2 PDFunnicyriacPas encore d'évaluation
- AaaaDocument3 pagesAaaaabduPas encore d'évaluation