Vous aimerez peut-être aussi
- Mantenimiento de infraestructuras de redes locales de datos. ELES0209D'EverandMantenimiento de infraestructuras de redes locales de datos. ELES0209Pas encore d'évaluation
- Instalación y configuración de periféricos microinformáticos. IFCT0309D'EverandInstalación y configuración de periféricos microinformáticos. IFCT0309Pas encore d'évaluation
- Calcular Espiras y Calibre de BobinadoDocument12 pagesCalcular Espiras y Calibre de BobinadotehobonPas encore d'évaluation
- 2 - Conectar VirtualBox A PLCDocument8 pages2 - Conectar VirtualBox A PLCOrlando Blanco WongPas encore d'évaluation
- Acondicionamiento de Una SeñalDocument6 pagesAcondicionamiento de Una SeñalIngridLisethPas encore d'évaluation
- Sensores IndustrialesDocument39 pagesSensores Industrialesrodman1306Pas encore d'évaluation
- SENSORESDocument37 pagesSENSORESAndres ReyesPas encore d'évaluation
- Catalogo Baja Tension SIEMENSDocument378 pagesCatalogo Baja Tension SIEMENSEduardo Mtz100% (3)
- Servidor OPC para La Importación de Datos A ExcelDocument8 pagesServidor OPC para La Importación de Datos A ExcelDouglas SotezPas encore d'évaluation
- Autómatas ProgramablesDocument21 pagesAutómatas ProgramablesHipolito CarbajalPas encore d'évaluation
- Practica OptoacopladorDocument7 pagesPractica OptoacopladoralePas encore d'évaluation
- Sensores PDFDocument39 pagesSensores PDFGeras Ang100% (1)
- Calibración de Un Sensor FotoelectricoDocument9 pagesCalibración de Un Sensor FotoelectricoPedro Abel FrancoPas encore d'évaluation
- Modbus TCP Comunicación Maestro EsclavoDocument11 pagesModbus TCP Comunicación Maestro EsclavoCarlos Eduardo Vásquez BolañosPas encore d'évaluation
- OPCDocument17 pagesOPCPaulina CataldoPas encore d'évaluation
- Sensores de GasDocument3 pagesSensores de GasYesenia OrtizPas encore d'évaluation
- Clasificacion de SensoresDocument31 pagesClasificacion de Sensoresivonne galvanPas encore d'évaluation
- Curso de Autómatas ProgramablesDocument21 pagesCurso de Autómatas ProgramablesRoberto Milla LagoaPas encore d'évaluation
- Comunicación S7-200 Y S7-1200 - COM - CPU - CPUDocument13 pagesComunicación S7-200 Y S7-1200 - COM - CPU - CPUJohn Freddy Monroy JaimesPas encore d'évaluation
- TFG Diego CordonDocument188 pagesTFG Diego Cordonfer poloPas encore d'évaluation
- Arduino InformeDocument7 pagesArduino InformedenysPas encore d'évaluation
- Verilog USMDocument16 pagesVerilog USMRodStroyer GërtkPas encore d'évaluation
- Sensor Ultrasonico ArduinoDocument5 pagesSensor Ultrasonico ArduinoLuis De LeónPas encore d'évaluation
- SENSORESDocument27 pagesSENSORESscancopy clouthierPas encore d'évaluation
- Sistemas Automaticos 2 - Balotario Examen SustitutorioDocument9 pagesSistemas Automaticos 2 - Balotario Examen Sustitutorioacajahuaringa100% (1)
- Unidad 3 Arduino - InddDocument47 pagesUnidad 3 Arduino - InddBrian Marin100% (1)
- Clases de Sistemas ElectricosDocument12 pagesClases de Sistemas Electricos126ricardo126Pas encore d'évaluation
- Apuntes EdificiosDocument22 pagesApuntes EdificiosRICHARD ALVA BARDALESPas encore d'évaluation
- Laboratorio 3 LM35Document18 pagesLaboratorio 3 LM35Carlopio Albert GordonPas encore d'évaluation
- Mosfets y ArduinoDocument5 pagesMosfets y Arduinopeto ricPas encore d'évaluation
- Termopares (Básico)Document6 pagesTermopares (Básico)Alan RamPas encore d'évaluation
- Guía de La Aparamenta de Media TensiónDocument28 pagesGuía de La Aparamenta de Media TensiónRodrigoPas encore d'évaluation
- Tecnología EléctricaDocument145 pagesTecnología EléctricaGaetanoD'AloiaPas encore d'évaluation
- InformeDocument19 pagesInformeJunior BautistaPas encore d'évaluation
- ModbusDocument13 pagesModbusKevin MogrovejoPas encore d'évaluation
- Sensores OpticosDocument49 pagesSensores OpticosCarlos Sanz Alcaide100% (1)
- Sensores y Actuadores IndustrialesDocument103 pagesSensores y Actuadores IndustrialesLuis GuillermoPas encore d'évaluation
- Guía de Usuario de Arduino Rafael Enríquez HerradorDocument50 pagesGuía de Usuario de Arduino Rafael Enríquez Herradorjavier_vvm100% (1)
- 5.manual de Control Electromecanico 2014Document160 pages5.manual de Control Electromecanico 2014Chester Noel Brenes Aguirre100% (1)
- Domotica AutomatasDocument72 pagesDomotica AutomatasneoflashPas encore d'évaluation
- Manual Cypelec RebtDocument64 pagesManual Cypelec Rebtalbaropernalete19_80100% (1)
- 2015 MAR - El Ciclo de Trabajo en Motores Electricos NEMADocument2 pages2015 MAR - El Ciclo de Trabajo en Motores Electricos NEMAaracfenixPas encore d'évaluation
- Conversión Estrella Delta y Delta EstrellaDocument24 pagesConversión Estrella Delta y Delta EstrellaalaynhfPas encore d'évaluation
- Aparamenta EléctricaDocument22 pagesAparamenta Eléctricaluighi999Pas encore d'évaluation
- Tunel VPN Endian Conexión Virtual IPSECDocument21 pagesTunel VPN Endian Conexión Virtual IPSECJ Luis TupiaPas encore d'évaluation
- Controles Eléctricos y Automatización - Informe - 4Document17 pagesControles Eléctricos y Automatización - Informe - 4ROSAS MONTALVO JESUSPas encore d'évaluation
- Cátalogo Industrial 2020 (20200228)Document216 pagesCátalogo Industrial 2020 (20200228)Hydro Energy GroupPas encore d'évaluation
- Lab 04 - OPC - Modbus - RTUDocument8 pagesLab 04 - OPC - Modbus - RTUJose UgartePas encore d'évaluation
- Práctica 1 Compuertas LogicasDocument14 pagesPráctica 1 Compuertas Logicasleandro sanchezPas encore d'évaluation
- Cuadros EléctricosDocument6 pagesCuadros EléctricosALEX ESPINALPas encore d'évaluation
- Control PID de Temperarura (Analógico)Document6 pagesControl PID de Temperarura (Analógico)Rafael Aguilar RiosPas encore d'évaluation
- Control Automatico Circuitos RLCDocument200 pagesControl Automatico Circuitos RLCKevin PachecoPas encore d'évaluation
- Introduccion Algebra BooleanaDocument5 pagesIntroduccion Algebra Booleanaライトニンググリーン ドラゴンPas encore d'évaluation
- Robótica De Enjambre: ¿Cómo puede un enjambre de drones armados impulsados por inteligencia artificial organizar un intento de asesinato?D'EverandRobótica De Enjambre: ¿Cómo puede un enjambre de drones armados impulsados por inteligencia artificial organizar un intento de asesinato?Pas encore d'évaluation
- Sistemas memristivos: representación físico-matemática desde la teoría de sistemas dinámicosD'EverandSistemas memristivos: representación físico-matemática desde la teoría de sistemas dinámicosPas encore d'évaluation
- Tipos de SensoresDocument10 pagesTipos de SensoresConti Conti100% (1)
- Tarea 2 de AutomatismoDocument1 pageTarea 2 de AutomatismoalbertoacosPas encore d'évaluation
- ESTEVEZ 4-5 Elementos de ProtecciónDocument8 pagesESTEVEZ 4-5 Elementos de ProtecciónalbertoacosPas encore d'évaluation
- Tipos de PilasDocument16 pagesTipos de PilasalbertoacosPas encore d'évaluation
- AL-7 CuasiDocument1 pageAL-7 CuasialbertoacosPas encore d'évaluation
- Tamaños y Formatos de Pilas y BateríasDocument1 pageTamaños y Formatos de Pilas y BateríasalbertoacosPas encore d'évaluation
- Cargador Usb 5v A Otra TensiónDocument3 pagesCargador Usb 5v A Otra TensiónalbertoacosPas encore d'évaluation
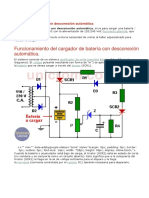
- Cargador de Batería Con Desconexión AutomáticaDocument3 pagesCargador de Batería Con Desconexión AutomáticaalbertoacosPas encore d'évaluation
- Z323 Conexiones Cable DB9Document1 pageZ323 Conexiones Cable DB9albertoacosPas encore d'évaluation
- Amplificadores de Audio IC LM386Document3 pagesAmplificadores de Audio IC LM386albertoacosPas encore d'évaluation
- Nuevo Amplificadores de Audio IC LM386 Otra VezDocument3 pagesNuevo Amplificadores de Audio IC LM386 Otra VezalbertoacosPas encore d'évaluation
- Microfono-Shure-Sm58 Benji PDFDocument3 pagesMicrofono-Shure-Sm58 Benji PDFalbertoacosPas encore d'évaluation
- GMAWDocument179 pagesGMAWcesar100% (1)
- Tema 2 BALANCES DE MATERIA Y DE ENERGÍADocument49 pagesTema 2 BALANCES DE MATERIA Y DE ENERGÍAManolitoreyesPas encore d'évaluation
- Guia de Mantenimiento de CoolerDocument6 pagesGuia de Mantenimiento de CoolerRobert RodriguezPas encore d'évaluation
- Materiales Biomedica UnitepcDocument4 pagesMateriales Biomedica UnitepcAlejandro CentellasPas encore d'évaluation
- Matriz Franklin ChasipantaDocument2 pagesMatriz Franklin ChasipantaFranklin ChasipantaPas encore d'évaluation
- Manual Estufa MultipleDocument19 pagesManual Estufa MultipleJ Antonio Uribe RiveraPas encore d'évaluation
- Taller de TransferenciaDocument1 pageTaller de TransferenciaLUIS SEBASTIAN MORENO SOLANOPas encore d'évaluation
- BA 3AE Vakuum Leistungsschalter SION ES 9229-0001-178-0G AG09-2015es 201707130849041469 PDFDocument80 pagesBA 3AE Vakuum Leistungsschalter SION ES 9229-0001-178-0G AG09-2015es 201707130849041469 PDFGerardo PulidoPas encore d'évaluation
- 57.0009.0538 12Document227 pages57.0009.0538 12juan ochoaPas encore d'évaluation
- Evidencia Taller Tarifa Del ServicioDocument6 pagesEvidencia Taller Tarifa Del Servicioana isa100% (2)
- Tabla PeriódicaDocument34 pagesTabla PeriódicaJohn Emmanuel MarcilloPas encore d'évaluation
- Coeficiente de ReflexiónDocument11 pagesCoeficiente de ReflexiónAnonymous acVHQjHltiPas encore d'évaluation
- DIgSILENT Proyect2Document1 pageDIgSILENT Proyect2Jhordy Cristobal MattosPas encore d'évaluation
- 6° Grado - Actividad Del 16 de OctubreDocument22 pages6° Grado - Actividad Del 16 de OctubreCinthya AlfaroPas encore d'évaluation
- 30leroy Somer Manual Mant07 - EsDocument24 pages30leroy Somer Manual Mant07 - Esonyx_lucianoPas encore d'évaluation
- Indicadores Municipales MARNDocument51 pagesIndicadores Municipales MARNIsa PF67% (6)
- Metodo Owas... 1234567Document41 pagesMetodo Owas... 1234567Fernando Panta Samillan100% (1)
- Cargadora de Ruedas 910 40y00001-Up (Máquina) Motorizado Por Motor 3204 (Sebp1254 - 03) - Sistemas y ComponentesDocument6 pagesCargadora de Ruedas 910 40y00001-Up (Máquina) Motorizado Por Motor 3204 (Sebp1254 - 03) - Sistemas y ComponentesWilliams ArayaPas encore d'évaluation
- ECOCONSTRUCCIONDocument12 pagesECOCONSTRUCCIONdiana garcia gonnzalezPas encore d'évaluation
- Bloque 4 DocumentalDocument38 pagesBloque 4 DocumentalDiego Gpe Ac AcPas encore d'évaluation
- Deber Electrost. TestDocument9 pagesDeber Electrost. Testrobert123Pas encore d'évaluation
- CaptacionDocument24 pagesCaptacionJero Joseph Gonzales CancinoPas encore d'évaluation
- Matriz Impacto Ambiental UmgDocument4 pagesMatriz Impacto Ambiental UmgSandía MonserratPas encore d'évaluation
- Catalogo Weleda 2013Document96 pagesCatalogo Weleda 2013Jhso TovarPas encore d'évaluation
- ArianaislasmedinaDocument111 pagesArianaislasmedinabetuki25Pas encore d'évaluation
- Propuesta de Mejora en El Proceso de ProducciónDocument30 pagesPropuesta de Mejora en El Proceso de ProducciónKevin PeñaPas encore d'évaluation
- Practica 4 Efecto FotoelectricoDocument5 pagesPractica 4 Efecto FotoelectricoCesar CastillogonzalezPas encore d'évaluation
- Control Porton Electrico (Similar) CTR19Document9 pagesControl Porton Electrico (Similar) CTR19sergiosaavedraparra100% (1)
- EJERCICIOS DE CONVECCIÓN FORZADA y LIBREDocument3 pagesEJERCICIOS DE CONVECCIÓN FORZADA y LIBREAdrian NarvaezPas encore d'évaluation
- Trabajo TermoDocument4 pagesTrabajo TermoJuanDavid Londoño100% (2)