Vous aimerez peut-être aussi
- Chap 5Document24 pagesChap 5Jane NdindaPas encore d'évaluation
- Bohr & Wheeler Fission Theory Calculation 4 March 2009: Z A 2 A ADocument22 pagesBohr & Wheeler Fission Theory Calculation 4 March 2009: Z A 2 A AAlexandre PereiraPas encore d'évaluation
- Math 209 Assignment 5 - SolutionsDocument3 pagesMath 209 Assignment 5 - SolutionsNorazilah YunusPas encore d'évaluation
- Math 209 Assignment 5 - SolutionsDocument3 pagesMath 209 Assignment 5 - SolutionsaudaciousribbonPas encore d'évaluation
- MAS102 Calculus II Final ExamDocument3 pagesMAS102 Calculus II Final ExamBichlegPas encore d'évaluation
- 24 12 Sol Summer Holiday HWDocument7 pages24 12 Sol Summer Holiday HWhboy99287Pas encore d'évaluation
- Chapter 10 Worked SolutionsDocument82 pagesChapter 10 Worked SolutionspaulPas encore d'évaluation
- Worksheet 1Document3 pagesWorksheet 1Keith Tanaka MagakaPas encore d'évaluation
- Chapter 5 StrutsDocument49 pagesChapter 5 Strutsbiruk estifanosPas encore d'évaluation
- Formula SheetDocument2 pagesFormula SheetAbdussametPas encore d'évaluation
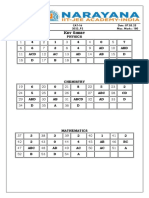
- Set-A With Correct OptionsDocument2 pagesSet-A With Correct OptionsjhgfjhgjhgkPas encore d'évaluation
- Solving Constraint Equations: Appendix ADocument34 pagesSolving Constraint Equations: Appendix AShivanshuAgarwalPas encore d'évaluation
- MA3351 QB Part A - B 01 - by LearnEngineering - inDocument21 pagesMA3351 QB Part A - B 01 - by LearnEngineering - inDhachu DhachuPas encore d'évaluation
- Model Exam - I-Question BankDocument9 pagesModel Exam - I-Question BankSyed Safeequr RahmanPas encore d'évaluation
- Two-Dimensional Elasticity Problems and Airy Stress FunctionDocument8 pagesTwo-Dimensional Elasticity Problems and Airy Stress FunctionMuhammad Irfan KhanPas encore d'évaluation
- Answers: D V R FDocument12 pagesAnswers: D V R FBarnik RoyPas encore d'évaluation
- ENGG 2101-Tutorial II Multiple Integrals.: by Assoc. Prof. R. Boojhawon (Module Coordinator) 27 Aug 2017Document2 pagesENGG 2101-Tutorial II Multiple Integrals.: by Assoc. Prof. R. Boojhawon (Module Coordinator) 27 Aug 2017Wakil NuckchadyPas encore d'évaluation
- Nodia and Company: Gate Solved Paper Mechanical Engineering 2010Document34 pagesNodia and Company: Gate Solved Paper Mechanical Engineering 2010Suraj ChaudharyPas encore d'évaluation
- King'S College London: BSC and Msci ExaminationDocument5 pagesKing'S College London: BSC and Msci Examinationaliv10Pas encore d'évaluation
- M261WEBDocument24 pagesM261WEBscribdPas encore d'évaluation
- CBSE Class 12 Physics Question Paper Set 1 Solution 2020Document20 pagesCBSE Class 12 Physics Question Paper Set 1 Solution 2020Basant KothariPas encore d'évaluation
- Math 52, Fall 2007 - Solutions To Homework 6Document4 pagesMath 52, Fall 2007 - Solutions To Homework 6sharmanator99Pas encore d'évaluation
- Article 4Document7 pagesArticle 4pratiksharma2828Pas encore d'évaluation
- Excel Review Center ECE Refresher/Coaching Course Math Take Home 4Document4 pagesExcel Review Center ECE Refresher/Coaching Course Math Take Home 4alvin buenPas encore d'évaluation
- MATH 1211 Tutorial IX-Volume IntegralsDocument2 pagesMATH 1211 Tutorial IX-Volume IntegralsKeshav GopaulPas encore d'évaluation
- MS Maths XII KVS SilcharDocument4 pagesMS Maths XII KVS SilcharArshbir Singh MalhiPas encore d'évaluation
- Co-Ordinate Geometry - Trigo (Sheet - 2) Answer Key & SolutionDocument2 pagesCo-Ordinate Geometry - Trigo (Sheet - 2) Answer Key & SolutionAnurag RamachandranPas encore d'évaluation
- SQA Multiple Choice Questions Higher Mathematics 2010Document11 pagesSQA Multiple Choice Questions Higher Mathematics 2010s9dijdjiPas encore d'évaluation
- Sample Paper 4 AnswerDocument17 pagesSample Paper 4 AnswermuthuPas encore d'évaluation
- EMT by Jakson PDFDocument145 pagesEMT by Jakson PDFSafi Ullah KhanPas encore d'évaluation
- Math 234 Winter 2012 FinalDocument11 pagesMath 234 Winter 2012 FinalKrage and JohnPas encore d'évaluation
- Shigleys Mechanical Engineering Design 8Document288 pagesShigleys Mechanical Engineering Design 8LUCASPas encore d'évaluation
- Docslide - Us - Solutions 8th Ed Structural Analysis Chapter 8 PDFDocument41 pagesDocslide - Us - Solutions 8th Ed Structural Analysis Chapter 8 PDFAditya PratamaPas encore d'évaluation
- Problem 01 - Diogo Correia Netto: ChargeDocument9 pagesProblem 01 - Diogo Correia Netto: ChargeVidyanand VikramPas encore d'évaluation
- ComplexElectrostatics PDFDocument19 pagesComplexElectrostatics PDFjuan CarlosPas encore d'évaluation
- (Specialist) 2011 TSSM Exam 2 SolutionsDocument17 pages(Specialist) 2011 TSSM Exam 2 SolutionsKelleyPas encore d'évaluation
- 07-05-23 - ISR - IIT - STAR CO-SC (MODEL-A) - JEE ADV - 2022 (P-II) - CAT-16 - KEY & SOlDocument12 pages07-05-23 - ISR - IIT - STAR CO-SC (MODEL-A) - JEE ADV - 2022 (P-II) - CAT-16 - KEY & SOlPridhvi samaPas encore d'évaluation
- Goldstein Chapter 2.1 PDFDocument15 pagesGoldstein Chapter 2.1 PDFJulioCesarSanchezRodriguezPas encore d'évaluation
- PHYS511HW4Document3 pagesPHYS511HW4Jherson Miguel HerreraPas encore d'évaluation
- Math 113 Assignment 6 SolutionsDocument3 pagesMath 113 Assignment 6 SolutionsQaty's Morelos RamosPas encore d'évaluation
- QFT 1Document12 pagesQFT 1Partha SahaPas encore d'évaluation
- Soluciones Capitulo 6 Kittel 2Document2 pagesSoluciones Capitulo 6 Kittel 2JoséVillalbaLynchPas encore d'évaluation
- Quiz 6Document2 pagesQuiz 6fatmaakbulut980Pas encore d'évaluation
- BE Formes Et ContoursDocument7 pagesBE Formes Et ContourszuiliPas encore d'évaluation
- +2 Physics EM FinalDocument8 pages+2 Physics EM FinalThamizhan Cyber SolutionsPas encore d'évaluation
- Jackson SolutionsDocument120 pagesJackson Solutionsjmislins33% (3)
- Calculus I Exercise 4.7.67 Fall 2017 SolutionDocument3 pagesCalculus I Exercise 4.7.67 Fall 2017 SolutionMarris BaePas encore d'évaluation
- Thermal Vibration of Surface Atoms: (Solution) Theoretical Question 3Document4 pagesThermal Vibration of Surface Atoms: (Solution) Theoretical Question 3Jean AbelaPas encore d'évaluation
- MT 2014fallDocument7 pagesMT 2014fallStrokes TheoremPas encore d'évaluation
- Thermal Vibration of Surface Atoms: (Solution) Theoretical Question 3Document4 pagesThermal Vibration of Surface Atoms: (Solution) Theoretical Question 3Jean AbelaPas encore d'évaluation
- Probability Teaching AssistanceDocument9 pagesProbability Teaching AssistanceGowriprasad Mysore ee19d702Pas encore d'évaluation
- Conic Sections FormulasDocument2 pagesConic Sections FormulasMulti talented IndiaPas encore d'évaluation
- M III Part A Q&ADocument48 pagesM III Part A Q&AAnonymous WtjVcZCgPas encore d'évaluation
- 8va Solutions Shigley PDFDocument479 pages8va Solutions Shigley PDFHaner EscorciaPas encore d'évaluation
- Math-IV - Unit - 5Document24 pagesMath-IV - Unit - 5MOUNODEEP CHAKRABORTYPas encore d'évaluation
- Tables of the Function w (z)- e-z2 ? ex2 dx: Mathematical Tables Series, Vol. 27D'EverandTables of the Function w (z)- e-z2 ? ex2 dx: Mathematical Tables Series, Vol. 27Pas encore d'évaluation
- Tables of Weber Functions: Mathematical Tables, Vol. 1D'EverandTables of Weber Functions: Mathematical Tables, Vol. 1Pas encore d'évaluation
- Solution Manual for an Introduction to Equilibrium ThermodynamicsD'EverandSolution Manual for an Introduction to Equilibrium ThermodynamicsPas encore d'évaluation
- Answers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesD'EverandAnswers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesÉvaluation : 1.5 sur 5 étoiles1.5/5 (2)
- Overview of Solar DesalinationDocument17 pagesOverview of Solar Desalinationalagar krishna kumarPas encore d'évaluation
- s17 PDFDocument5 pagess17 PDFalagar krishna kumarPas encore d'évaluation
- Mechatronics: Pushparaj Mani PathakDocument36 pagesMechatronics: Pushparaj Mani Pathakalagar krishna kumarPas encore d'évaluation
- Desalination by Using Alternative EnergyDocument20 pagesDesalination by Using Alternative Energyalagar krishna kumarPas encore d'évaluation
- Sciencedirect Sciencedirect SciencedirectDocument4 pagesSciencedirect Sciencedirect Sciencedirectalagar krishna kumarPas encore d'évaluation
- A Vibration Analysis of A 6 Axis Industrial Robot Using Fea: SciencedirectDocument8 pagesA Vibration Analysis of A 6 Axis Industrial Robot Using Fea: Sciencedirectalagar krishna kumarPas encore d'évaluation
- Static Analysis of A 6 - Axis Industrial Robot Using Finite Element AnalysisDocument7 pagesStatic Analysis of A 6 - Axis Industrial Robot Using Finite Element Analysisalagar krishna kumarPas encore d'évaluation
- Understanding Volume Kinetics: Robert G. HahnDocument9 pagesUnderstanding Volume Kinetics: Robert G. Hahnalagar krishna kumarPas encore d'évaluation
- Intro Robot Kinematics 5Document25 pagesIntro Robot Kinematics 5Gnanesh PendliPas encore d'évaluation
- Unit 14 - Week 12: Assignment 12Document5 pagesUnit 14 - Week 12: Assignment 12alagar krishna kumarPas encore d'évaluation
- Stress TypesDocument1 pageStress Typesalagar krishna kumarPas encore d'évaluation
- Writing Goals and Objectives GoalsDocument2 pagesWriting Goals and Objectives Goalsalagar krishna kumarPas encore d'évaluation
- Agreement Gold LoanDocument4 pagesAgreement Gold Loanalagar krishna kumarPas encore d'évaluation
- Fluid Mechanics Is A Branch of Science Which Deals With Fluids inDocument6 pagesFluid Mechanics Is A Branch of Science Which Deals With Fluids inalagar krishna kumarPas encore d'évaluation
- EGD Diagrams1Document3 pagesEGD Diagrams1alagar krishna kumarPas encore d'évaluation
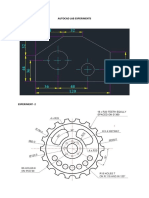
- Autocad Lab Experiments Experiment - 1Document3 pagesAutocad Lab Experiments Experiment - 1alagar krishna kumarPas encore d'évaluation
- Life QuotesDocument2 pagesLife Quotesalagar krishna kumarPas encore d'évaluation
- For Compressible Flow:: Displacement Thickness: It Is Denoted byDocument1 pageFor Compressible Flow:: Displacement Thickness: It Is Denoted byalagar krishna kumarPas encore d'évaluation
- PVA Grades and SpecificationsDocument2 pagesPVA Grades and Specificationspasalacqua85Pas encore d'évaluation
- BEC-BCS Crossover: Diego Luis Velasco-GonzálezDocument7 pagesBEC-BCS Crossover: Diego Luis Velasco-GonzálezDIEGO LUIS VELASCO GONZALEZPas encore d'évaluation
- BLY SUVAT Equations 2Document19 pagesBLY SUVAT Equations 2Sylvain YABRE100% (2)
- Current Transformers Technical Info 4921210119 UKDocument10 pagesCurrent Transformers Technical Info 4921210119 UKdwdawadPas encore d'évaluation
- ArchimedesDocument5 pagesArchimedesvision100% (2)
- MEC291 Dynamic Crank and Slider2Document9 pagesMEC291 Dynamic Crank and Slider2Amir ArsyadPas encore d'évaluation
- Electric Energy (BEY)Document8 pagesElectric Energy (BEY)T0R0M0N 7Pas encore d'évaluation
- Dynamic Response of A U Tube ManometerDocument8 pagesDynamic Response of A U Tube ManometerRitikranjan YadavPas encore d'évaluation
- Current ElectricityDocument12 pagesCurrent ElectricityKumbhar SaketPas encore d'évaluation
- Tensor Analysis and GeometryDocument7 pagesTensor Analysis and Geometryapi-19523062100% (1)
- 14 All-1B-CSMDocument486 pages14 All-1B-CSMShubham Chattopadhyay100% (2)
- Ultrasound Physics and Instrumentation Content OutlineDocument19 pagesUltrasound Physics and Instrumentation Content OutlineSherif H. Mohamed100% (1)
- Soal PTS Ii B.inggris Kelas 5 2022-2023Document4 pagesSoal PTS Ii B.inggris Kelas 5 2022-2023Aizen nyatirPas encore d'évaluation
- Practical Reaction TimeDocument2 pagesPractical Reaction TimeTreeicicles100% (1)
- Dryer Controls PDFDocument10 pagesDryer Controls PDFNguyễn Lê Anh KhoaPas encore d'évaluation
- Partial Discharge Patterns in High Voltage InsulationDocument7 pagesPartial Discharge Patterns in High Voltage Insulationfery zenPas encore d'évaluation
- 1.1 A Magnetic Circuit With A Single Air Gap Is Shown in Fig. 1.24. The Core DimensionsDocument31 pages1.1 A Magnetic Circuit With A Single Air Gap Is Shown in Fig. 1.24. The Core DimensionsAsim AliPas encore d'évaluation
- Chapter 2Document35 pagesChapter 2younessinaPas encore d'évaluation
- CBSE Class 12 Physics Question Paper Solved 2019 Set NDocument41 pagesCBSE Class 12 Physics Question Paper Solved 2019 Set Npubg rk battlePas encore d'évaluation
- Control DevicesDocument19 pagesControl DevicesSuzaini SupingatPas encore d'évaluation
- History of Buckling of ColumnDocument10 pagesHistory of Buckling of ColumnSorin Viorel CrainicPas encore d'évaluation
- Latent HeatDocument21 pagesLatent HeatFiona RozarioPas encore d'évaluation
- Sterilization Validation and Routine Operation Handbook RadiationDocument170 pagesSterilization Validation and Routine Operation Handbook RadiationSlavaPas encore d'évaluation
- Semiconductor Microwave Devices StuDocument17 pagesSemiconductor Microwave Devices StuAdithyan JPas encore d'évaluation
- 15 12 Calculating KB BM and Metacentric DiagramsDocument8 pages15 12 Calculating KB BM and Metacentric DiagramsPatrick ArancesPas encore d'évaluation
- Static/dynamic Aluminium AlloysDocument11 pagesStatic/dynamic Aluminium AlloysGonzalo AnzaldoPas encore d'évaluation
- Abstract Jeniffer BarretoDocument2 pagesAbstract Jeniffer Barretojcbarreto2Pas encore d'évaluation
- Fundamental Physics Used in Forensics: Crimson PublishersDocument4 pagesFundamental Physics Used in Forensics: Crimson PublishersdevendrakphyPas encore d'évaluation
- Sarbari GuhaDocument5 pagesSarbari Guhavishwas gaurPas encore d'évaluation