Vous aimerez peut-être aussi
- QCM GRH CorrigéDocument6 pagesQCM GRH CorrigéAAAAAA84% (45)
- Radio Protection PratiqueDocument22 pagesRadio Protection Pratiquebassem besbesPas encore d'évaluation
- FreeCAD | étape par étape: Apprenez à créer des objets 3D, des assemblages et des dessins techniquesD'EverandFreeCAD | étape par étape: Apprenez à créer des objets 3D, des assemblages et des dessins techniquesPas encore d'évaluation
- Caracteristiques MateriauxDocument46 pagesCaracteristiques MateriauxMohamed Abed100% (2)
- Normale Corigé 2012 PDFDocument8 pagesNormale Corigé 2012 PDFGuiliassPas encore d'évaluation
- Installations DomestiquesDocument14 pagesInstallations DomestiquesAmin Hammouda100% (1)
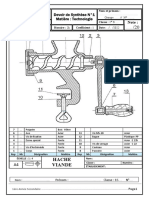
- DS N°1-1AS-2020-hache+viandes+Document4 pagesDS N°1-1AS-2020-hache+viandes+Youssef Aouadi0% (1)
- Sec Minesponts 2004 Sic PSIDocument12 pagesSec Minesponts 2004 Sic PSIAlexandre BourrieauPas encore d'évaluation
- Les Liaisons 2020Document1 pageLes Liaisons 2020Mohamed AbedPas encore d'évaluation
- Les Liaisons 2020Document1 pageLes Liaisons 2020Mohamed AbedPas encore d'évaluation
- Sujet Mai-2018 - Poste de Perçage Automatique PDFDocument19 pagesSujet Mai-2018 - Poste de Perçage Automatique PDFdiassaPas encore d'évaluation
- Correction Ds1 Systeme Automatise de Marquage de BoitesDocument4 pagesCorrection Ds1 Systeme Automatise de Marquage de BoitesAlami ElPas encore d'évaluation
- CAP Zéro Coupe Tube - 2020Document4 pagesCAP Zéro Coupe Tube - 2020Rodolphe SounouPas encore d'évaluation
- 207 0 Serre Joint Sous Ens 1Document3 pages207 0 Serre Joint Sous Ens 1mouad hamdaniPas encore d'évaluation
- Devoir de Contrôle N°1 - Génie Mécanique DC Pompe D'alimentation - 3ème Technique (2013-2014) MR Mlaouhi SlaheddineDocument6 pagesDevoir de Contrôle N°1 - Génie Mécanique DC Pompe D'alimentation - 3ème Technique (2013-2014) MR Mlaouhi SlaheddineBen nasseur Mohamed aliPas encore d'évaluation
- Bcucluj FP 186593 1915-1916 PDFDocument378 pagesBcucluj FP 186593 1915-1916 PDFcatalinschiPas encore d'évaluation
- TD1-Dispositif de SerrageDocument6 pagesTD1-Dispositif de SerrageAlbertø Là VïtëssëPas encore d'évaluation
- DS5 SujetDocument7 pagesDS5 SujetPierre BeckPas encore d'évaluation
- Evaluation Ajustements Vrin Bosch LvesDocument6 pagesEvaluation Ajustements Vrin Bosch LvesHanane TounsiPas encore d'évaluation
- CPAV-Ex2 Emb-Frein PDFDocument5 pagesCPAV-Ex2 Emb-Frein PDFHanane TounsiPas encore d'évaluation
- Exercice Ajustements eDocument3 pagesExercice Ajustements eMohsen SaidiPas encore d'évaluation
- TD N°3 PFS Analytique - 3Document6 pagesTD N°3 PFS Analytique - 3Yassine BouchattaPas encore d'évaluation
- TP Scie SauteuseDocument5 pagesTP Scie SauteuseremivsnPas encore d'évaluation
- Devoir de Contrôle N°3 - Technologie Positionneur - 2ème Sciences (2009-2010) MR ChariagDocument2 pagesDevoir de Contrôle N°3 - Technologie Positionneur - 2ème Sciences (2009-2010) MR ChariagSameh RomdhaniPas encore d'évaluation
- Exercice Chape Dessin CoteDocument2 pagesExercice Chape Dessin CoteABDELHAKIMPas encore d'évaluation
- Liaison Hélicoidale ProfDocument12 pagesLiaison Hélicoidale ProftounsiPas encore d'évaluation
- Roue de FrictionDocument4 pagesRoue de Frictionuriel marcel nzambaPas encore d'évaluation
- TD Systèmes ArticulésDocument6 pagesTD Systèmes ArticulésAya El RhayourPas encore d'évaluation
- Amcns-Devoir de Maison 2eme Tr3 CorrigerDocument16 pagesAmcns-Devoir de Maison 2eme Tr3 Corrigersaded05Pas encore d'évaluation
- 32 Loi Entrée Sortie Géométrique D 1Document6 pages32 Loi Entrée Sortie Géométrique D 1hsn frk100% (1)
- Devoir Sq8 StatiqueDocument8 pagesDevoir Sq8 StatiqueRuben100% (1)
- Chap2 Leçon2 3&4Document52 pagesChap2 Leçon2 3&4Guiliass100% (2)
- Exercice Ajustements eDocument4 pagesExercice Ajustements eMourad DhahriPas encore d'évaluation
- App3 Rep STE STM SMB PDFDocument10 pagesApp3 Rep STE STM SMB PDFNSANGOUPas encore d'évaluation
- Dossier Réponses Page 1 / 8 Unite de Remplissage de FlaconsDocument3 pagesDossier Réponses Page 1 / 8 Unite de Remplissage de FlaconsMortadha RabahPas encore d'évaluation
- PHI-M211-liaison-pivot-tondeuse 2016Document5 pagesPHI-M211-liaison-pivot-tondeuse 2016Francis BECPas encore d'évaluation
- Résumé-De-Cours Dessin D'ensembleDocument9 pagesRésumé-De-Cours Dessin D'ensembleatika kabouyaPas encore d'évaluation
- Embrayages Frein 10 11 12Document8 pagesEmbrayages Frein 10 11 12Ah MédPas encore d'évaluation
- Devoir de Contrôle N°2 - Technologie - Positionneur de Parabole - 1ère AS (2015-2016) MR RAOUAFI - AbdallahDocument3 pagesDevoir de Contrôle N°2 - Technologie - Positionneur de Parabole - 1ère AS (2015-2016) MR RAOUAFI - Abdallahsarra.benhlimaPas encore d'évaluation
- Cine Graph EleveDocument8 pagesCine Graph EleveMohammed DahbiPas encore d'évaluation
- TP Treuil ProfDocument6 pagesTP Treuil ProfmidounPas encore d'évaluation
- DS1 - 1èr STEDocument4 pagesDS1 - 1èr STEmasteratsii100% (1)
- Exercice Etau Pour MVDocument2 pagesExercice Etau Pour MVYoussef YouriPas encore d'évaluation
- Corrige DS2 3ST DT DR GM GE Region KairouanDocument8 pagesCorrige DS2 3ST DT DR GM GE Region KairouanBouabdellaoui saif ennasrPas encore d'évaluation
- Seq 3 P MebDocument4 pagesSeq 3 P MebSaleh Bouba100% (1)
- Technologie - Bridage - 3ème Technique (2015-2016) MR Mnejja SlimDocument7 pagesTechnologie - Bridage - 3ème Technique (2015-2016) MR Mnejja Slimammiwester100% (1)
- 05 Cours Cotation Dimensionnelle EDocument6 pages05 Cours Cotation Dimensionnelle Eأحمد الموريتانيPas encore d'évaluation
- 09 - Trains EpicycloïdauxDocument9 pages09 - Trains EpicycloïdauxOumaimaPas encore d'évaluation
- Chapitre 2 Resistance Elements MachineDocument4 pagesChapitre 2 Resistance Elements MachineImad BouhafsPas encore d'évaluation
- PFS 2 ForcesDocument8 pagesPFS 2 ForcesSegaAlainCoulibalyPas encore d'évaluation
- MSSR - 3-TD Pompe Prise Camion CorrectionDocument8 pagesMSSR - 3-TD Pompe Prise Camion Correctionpierre chantelotPas encore d'évaluation
- TD20 Scie SauteuseDocument2 pagesTD20 Scie SauteuseNabiha LabidiPas encore d'évaluation
- 04-Coupes Et Sections - 2018-2019Document26 pages04-Coupes Et Sections - 2018-2019RedaAbdraoufPas encore d'évaluation
- COURS Conception Systeme MécaniqueDocument22 pagesCOURS Conception Systeme MécaniqueAymen KhalfaouiPas encore d'évaluation
- Pro Ma 2007 PDFDocument2 pagesPro Ma 2007 PDFfabricelPas encore d'évaluation
- CS-TM1-TD Hyperstatisme Pompe Prise Camion CorrectionDocument7 pagesCS-TM1-TD Hyperstatisme Pompe Prise Camion CorrectionPierre LancelotPas encore d'évaluation
- TD Appareil Enregistreur ElevDocument8 pagesTD Appareil Enregistreur Elevوسيم زعفوريPas encore d'évaluation
- TN06 PDFDocument34 pagesTN06 PDFMa HdiPas encore d'évaluation
- Lecon A2-1 - Système CombinatoireDocument9 pagesLecon A2-1 - Système CombinatoireElmokh LassaadPas encore d'évaluation
- PDF - Devoir1 - Groupe 4Document3 pagesPDF - Devoir1 - Groupe 4Simon HoudePas encore d'évaluation
- 2018-2019-DSN°3-2ème-etau Pour Tube - RattrapageDocument4 pages2018-2019-DSN°3-2ème-etau Pour Tube - RattrapageAdam BensaidPas encore d'évaluation
- Epi CycloDocument4 pagesEpi CycloHassan HallaouaPas encore d'évaluation
- AjutstemtDocument2 pagesAjutstemtDomo PulsePas encore d'évaluation
- Cours Theorie Des Mecanismes PDFDocument12 pagesCours Theorie Des Mecanismes PDFmaraghni_hassine7592100% (2)
- NnneDocument10 pagesNnneYACOUBA BIYRNPas encore d'évaluation
- 01 Bac 2008 Princpale CorrigéDocument9 pages01 Bac 2008 Princpale CorrigéMohamed AbedPas encore d'évaluation
- Manuelle de Cours Sciences de Lingénieur Transmettre Avec Modification Du Couple Et de La VitesseDocument80 pagesManuelle de Cours Sciences de Lingénieur Transmettre Avec Modification Du Couple Et de La VitesseMajda El-aouni100% (4)
- TD0 Demarche de Projet CoursDocument6 pagesTD0 Demarche de Projet CoursMohamed AbedPas encore d'évaluation
- 1-Transmission de Puissance OCDocument8 pages1-Transmission de Puissance OCMohamed AbedPas encore d'évaluation
- Couple Outil-Piece 3Document4 pagesCouple Outil-Piece 3Mohamed Abed100% (1)
- Guide D'installation ImageFocus CMEX - CopieDocument6 pagesGuide D'installation ImageFocus CMEX - CopieArseni MaximPas encore d'évaluation
- Références À Rappeler: Mme Boubaker Beatrice 3 Place de La Commune 38130 EchirollesDocument2 pagesRéférences À Rappeler: Mme Boubaker Beatrice 3 Place de La Commune 38130 EchirollesIskander Ibn AbdelBassit100% (1)
- 3) La SurchauffeDocument3 pages3) La SurchauffemencarelliPas encore d'évaluation
- NDRC2023 - E5A - RCS - Grille D'aide À L'évaluation - AGRICOLE Naomy 2Document17 pagesNDRC2023 - E5A - RCS - Grille D'aide À L'évaluation - AGRICOLE Naomy 2anastase.fbdbPas encore d'évaluation
- 3.diététique Du NourrissonDocument22 pages3.diététique Du NourrissonZakaria BouazzaPas encore d'évaluation
- Cinetique ChimiqueDocument29 pagesCinetique ChimiqueChrist FiagrePas encore d'évaluation
- Fiche Pédagogique - Cours de Culture-ChâteauDocument6 pagesFiche Pédagogique - Cours de Culture-ChâteauRuoya LIPas encore d'évaluation
- Ft-Prokils330 AfDocument1 pageFt-Prokils330 AfPablo SizarPas encore d'évaluation
- Compte Rendu Architecture-NouamanDocument22 pagesCompte Rendu Architecture-NouamanNouaman MohamedPas encore d'évaluation
- TP N 2-LinuxDocument8 pagesTP N 2-Linuxbouki15Pas encore d'évaluation
- Mac Lisez-Moi Finale 2014Document17 pagesMac Lisez-Moi Finale 2014LaurenceRousselPas encore d'évaluation
- Plan DaffairesDocument17 pagesPlan DaffairesRamzi BoubaPas encore d'évaluation
- PROFLE+ Engagement de L'enseignantDocument1 pagePROFLE+ Engagement de L'enseignantfakiPas encore d'évaluation
- 2.master MFB.S3.OMC. PART1. 2012-13Document14 pages2.master MFB.S3.OMC. PART1. 2012-13Yousra ZrPas encore d'évaluation
- Swingo 455 EDocument27 pagesSwingo 455 Eangelo fuentesPas encore d'évaluation
- Psychophysio PDF LMD 2015Document46 pagesPsychophysio PDF LMD 2015AliBenMessaoudPas encore d'évaluation
- 2-La ConsommationDocument1 page2-La ConsommationHasna JãPas encore d'évaluation
- AndriamamonjyHasiniainaR AGRO Lic 16Document28 pagesAndriamamonjyHasiniainaR AGRO Lic 16Rindra RabarisonPas encore d'évaluation
- Mandat Etudes Paralleles Bac Rapport JuryDocument92 pagesMandat Etudes Paralleles Bac Rapport Jurycacodak777Pas encore d'évaluation
- Texte Feuilles Des ArbresDocument2 pagesTexte Feuilles Des ArbresMouloudPas encore d'évaluation
- 1995TH Maleki K NS19171Document366 pages1995TH Maleki K NS19171sebouppppPas encore d'évaluation
- Sujets TPsDocument27 pagesSujets TPsAtoui IssamPas encore d'évaluation
- D4.13.Ch5.sechage Exercices2Document4 pagesD4.13.Ch5.sechage Exercices2Rihab khPas encore d'évaluation
- Cake 100% Citron - Les Pâtisseries D'aurélienDocument5 pagesCake 100% Citron - Les Pâtisseries D'aurélienAbderrahim El-massoufyPas encore d'évaluation
- Lettre Motivation Conseillere Vente Pret A PorterDocument2 pagesLettre Motivation Conseillere Vente Pret A PorterStephane LoePas encore d'évaluation