Vous aimerez peut-être aussi
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- JEE Main 2020 Question Paper With Solution 08 Jan 2020 Shift 1 Memory BasedDocument34 pagesJEE Main 2020 Question Paper With Solution 08 Jan 2020 Shift 1 Memory BasedmisostudyPas encore d'évaluation
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- NEET Physics Sample EbookDocument34 pagesNEET Physics Sample EbookmisostudyPas encore d'évaluation
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- JEE Main 2020 PCM Question Paper 08 Jan 2020 Shift 2 Memory BasedDocument16 pagesJEE Main 2020 PCM Question Paper 08 Jan 2020 Shift 2 Memory BasedmisostudyPas encore d'évaluation
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- JEE Main 2020 PCM Question Paper 08 Jan 2020 Shift 1 Memory BasedDocument20 pagesJEE Main 2020 PCM Question Paper 08 Jan 2020 Shift 1 Memory BasedmisostudyPas encore d'évaluation
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- NEET Sample EbookDocument117 pagesNEET Sample EbookmisostudyPas encore d'évaluation
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- NEET Chemistry Sample EbookDocument50 pagesNEET Chemistry Sample EbookmisostudyPas encore d'évaluation
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Crash Course NEET Sample EbookDocument23 pagesCrash Course NEET Sample EbookmisostudyPas encore d'évaluation
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Crash Course AIIMS Sample EbookDocument22 pagesCrash Course AIIMS Sample EbookmisostudyPas encore d'évaluation
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- Crash Course JEE Main Sample EbookDocument29 pagesCrash Course JEE Main Sample EbookmisostudyPas encore d'évaluation
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- NEET 11 Sample EbookDocument57 pagesNEET 11 Sample EbookmisostudyPas encore d'évaluation
- NEET 12 Sample EbookDocument60 pagesNEET 12 Sample EbookmisostudyPas encore d'évaluation
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- NEET Biology Sample EbookDocument33 pagesNEET Biology Sample EbookmisostudyPas encore d'évaluation
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- Crash Course JEE Advanced Sample EbookDocument31 pagesCrash Course JEE Advanced Sample EbookmisostudyPas encore d'évaluation
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- Crash Course JEE Main Advanced Sample EbookDocument60 pagesCrash Course JEE Main Advanced Sample EbookmisostudyPas encore d'évaluation
- JEE Main 11 Sample EbookDocument57 pagesJEE Main 11 Sample EbookmisostudyPas encore d'évaluation
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- JEE Main 11&12 Sample EbookDocument130 pagesJEE Main 11&12 Sample EbookmisostudyPas encore d'évaluation
- JEE Main Advanced 11&12 Sample EbookDocument149 pagesJEE Main Advanced 11&12 Sample EbookmisostudyPas encore d'évaluation
- JEE Main Advanced 12 Sample EbookDocument83 pagesJEE Main Advanced 12 Sample EbookmisostudyPas encore d'évaluation
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- JEE Main Advanced 11 SampleDocument66 pagesJEE Main Advanced 11 SamplemisostudyPas encore d'évaluation
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- JEE Main 12 Sample EbookDocument73 pagesJEE Main 12 Sample EbookmisostudyPas encore d'évaluation
- Crash Course CBSE PCM Sample EbookDocument27 pagesCrash Course CBSE PCM Sample EbookmisostudyPas encore d'évaluation
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- JEE Mathematics Sample EbookDocument49 pagesJEE Mathematics Sample EbookmisostudyPas encore d'évaluation
- JEE Physics Sample EbookDocument43 pagesJEE Physics Sample EbookmisostudyPas encore d'évaluation
- Crash Course CBSE PCB Sample EbookDocument24 pagesCrash Course CBSE PCB Sample EbookmisostudyPas encore d'évaluation
- AIIMS Chemistry Sample EbookDocument57 pagesAIIMS Chemistry Sample EbookmisostudyPas encore d'évaluation
- JEE Chemistry Sample EbookDocument57 pagesJEE Chemistry Sample EbookmisostudyPas encore d'évaluation
- AIIMS Physics Sample EbookDocument42 pagesAIIMS Physics Sample Ebookmisostudy0% (1)
- Crash Course CBSE Class 10 Sample EbookDocument30 pagesCrash Course CBSE Class 10 Sample Ebookmisostudy100% (1)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- AIIMS Biology Sample EbookDocument32 pagesAIIMS Biology Sample Ebookmisostudy100% (1)
- AIIMS Class 12 PCB Sample EbookDocument69 pagesAIIMS Class 12 PCB Sample EbookmisostudyPas encore d'évaluation
- Experiment - 1: Aim: Create Webpage Using HTML Form To Demonstrate Student Information FormDocument29 pagesExperiment - 1: Aim: Create Webpage Using HTML Form To Demonstrate Student Information FormModi rutvikPas encore d'évaluation
- Competition Systems IGN1A Inductive Smart Coil - IGN1ADocument2 pagesCompetition Systems IGN1A Inductive Smart Coil - IGN1AJoão Lucas ZaionsPas encore d'évaluation
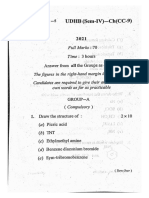
- 2021 SEM 4 CC 9 OrganicDocument3 pages2021 SEM 4 CC 9 OrganicGaurav KumarPas encore d'évaluation
- 4333105.56 Ledenvo Led ST 60w 757 Vs1 Osram-TrfDocument12 pages4333105.56 Ledenvo Led ST 60w 757 Vs1 Osram-TrfFathulPas encore d'évaluation
- AN17825ADocument8 pagesAN17825AJose M PeresPas encore d'évaluation
- Bsm2300a SeriesDocument324 pagesBsm2300a SeriesIBRAHIMPas encore d'évaluation
- Metric Ton Is 1000 KGDocument5 pagesMetric Ton Is 1000 KGmcpayodPas encore d'évaluation
- NEW Handbook UG 160818 PDFDocument118 pagesNEW Handbook UG 160818 PDFHidayah MutalibPas encore d'évaluation
- Deflection of BeamsDocument109 pagesDeflection of BeamsNadir Khattak Jr.100% (1)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
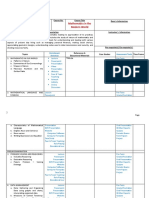
- Mathematics in The Modern World: Course No. Course Title Dean's InformationDocument5 pagesMathematics in The Modern World: Course No. Course Title Dean's InformationJayson SantelicesPas encore d'évaluation
- Workspace Satisfaction - The Privacy-Communication Trade-Off in Open-Plan OfficesDocument9 pagesWorkspace Satisfaction - The Privacy-Communication Trade-Off in Open-Plan OfficesAyşe Nur TürkerPas encore d'évaluation
- Tutorial 1 PDFDocument2 pagesTutorial 1 PDFSYAFIQAH ISMAIL100% (1)
- SIF Corporate-Presentatie 2017Document35 pagesSIF Corporate-Presentatie 201766apenlullenPas encore d'évaluation
- Pro ESEDocument2 pagesPro ESEquadhirababilPas encore d'évaluation
- Integrating Theory, Experiments, and FEA To Solve Challenging Nonlinear Mechanics ProblemsDocument17 pagesIntegrating Theory, Experiments, and FEA To Solve Challenging Nonlinear Mechanics ProblemsBodieTechPas encore d'évaluation
- Remote Sensing of Environment: SciencedirectDocument28 pagesRemote Sensing of Environment: SciencedirectAmmara HabibPas encore d'évaluation
- DRK109A&B Touch-Screen Bursting Strength TesterDocument2 pagesDRK109A&B Touch-Screen Bursting Strength Testermohamadreza1368Pas encore d'évaluation
- UML Class Diagram Examples of Common Scenarios - EdrawMaxDocument12 pagesUML Class Diagram Examples of Common Scenarios - EdrawMaxelizabeth enggPas encore d'évaluation
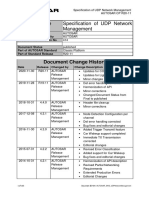
- AUTOSAR SWS UDPNetworkManagementDocument103 pagesAUTOSAR SWS UDPNetworkManagementStefan RuscanuPas encore d'évaluation
- DigfiltDocument237 pagesDigfiltJuhi SinghPas encore d'évaluation
- Tractor Engine and Drawbar PerformanceDocument3 pagesTractor Engine and Drawbar PerformancemaureenPas encore d'évaluation
- 03 VEX SpotDocument2 pages03 VEX SpottemamPas encore d'évaluation
- Effect of Salinity On Proteins in Some Wheat CultivarsDocument9 pagesEffect of Salinity On Proteins in Some Wheat Cultivarsray m deraniaPas encore d'évaluation
- Guest WiFi With MikroTik RoutersDocument1 pageGuest WiFi With MikroTik Routersmahad3vaPas encore d'évaluation
- Sesam and Bladed - Efficient Coupled Analyses - Webinar Presentation - tcm8-102589 PDFDocument31 pagesSesam and Bladed - Efficient Coupled Analyses - Webinar Presentation - tcm8-102589 PDFsamiransmitaPas encore d'évaluation
- Radioddity DMR Programming Tips - (EN+DE)Document35 pagesRadioddity DMR Programming Tips - (EN+DE)David TutPas encore d'évaluation
- Certificate of Analysis: Sulfate IC CRM - 1000 MG/LDocument2 pagesCertificate of Analysis: Sulfate IC CRM - 1000 MG/LasanalyticalPas encore d'évaluation
- Transom Analysis ComparisonDocument38 pagesTransom Analysis ComparisonRifky NetriadyPas encore d'évaluation
- Flyback Converter DesignDocument8 pagesFlyback Converter DesignLullaby summerPas encore d'évaluation