Vous aimerez peut-être aussi
- ST 64579860304Document207 pagesST 64579860304Josep Maria Albareda100% (4)
- Libros JoyeriaDocument16 pagesLibros JoyeriaDavid Casanueva Capocchi67% (3)
- Pedido 114-6681729-7821842Document1 pagePedido 114-6681729-7821842ByronPas encore d'évaluation
- 622 Dise%25C3%25B1o%2Bde%2BSistemas%2BMec%25C3%25A1nicos%2B-%2BCADENAS%2B-%2Document63 pages622 Dise%25C3%25B1o%2Bde%2BSistemas%2BMec%25C3%25A1nicos%2B-%2BCADENAS%2B-%2Andrea M. Davila CamposPas encore d'évaluation
- Sensores de NivelDocument48 pagesSensores de NivelByronPas encore d'évaluation
- Clase DM7Document31 pagesClase DM7ByronPas encore d'évaluation
- Clase DM7Document26 pagesClase DM7ByronPas encore d'évaluation
- Clase DM1Document24 pagesClase DM1ByronPas encore d'évaluation
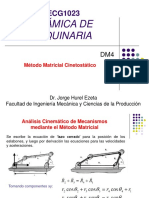
- Clase DM4Document32 pagesClase DM4ByronPas encore d'évaluation
- Clase DM5Document27 pagesClase DM5ByronPas encore d'évaluation
- Diseño de EjesDocument61 pagesDiseño de EjesByron100% (1)
- Proyecto Instrumentacion - Sensores de LuzDocument22 pagesProyecto Instrumentacion - Sensores de LuzByronPas encore d'évaluation
- Clase DM6Document16 pagesClase DM6ByronPas encore d'évaluation
- EnsayoDocument8 pagesEnsayoFrancisca Edwards RiuPas encore d'évaluation
- MZ-04 Emp - Pe 38Document43 pagesMZ-04 Emp - Pe 38Victor TlvPas encore d'évaluation
- Tarea 1 Modulo 4 CristinaDocument5 pagesTarea 1 Modulo 4 CristinaFernanda PaizPas encore d'évaluation
- (TP1) .Adm 90Document11 pages(TP1) .Adm 90Enzö Ruiz GPas encore d'évaluation
- Sociologia de La Empresa PDFDocument259 pagesSociologia de La Empresa PDFSamantha Gómez DíazPas encore d'évaluation
- Actividad Del Dia 04 de OctubreDocument5 pagesActividad Del Dia 04 de OctubreARIANA BRISIP CHOZO LOPEZPas encore d'évaluation
- 9PDCM211Document3 pages9PDCM211Luis Rodrigo Romero LévanoPas encore d'évaluation
- Interpretación Teórico Práctica - Nathaly NavarroDocument14 pagesInterpretación Teórico Práctica - Nathaly NavarroMiguePas encore d'évaluation
- Iso 11620 Une 50 137Document69 pagesIso 11620 Une 50 137mauricio.ramirezcuevas7585100% (1)
- Guia Nacional Oferta Capacitacion 1Document298 pagesGuia Nacional Oferta Capacitacion 1robert10_7Pas encore d'évaluation
- Etnografía Métodos de InvestigaciónDocument17 pagesEtnografía Métodos de InvestigaciónHeinrich Corner0% (1)
- Of. 14 Co-183028-2018. Solicitud Informacion Complementaria Estudio Diseno GeometricoDocument2 pagesOf. 14 Co-183028-2018. Solicitud Informacion Complementaria Estudio Diseno GeometricoCarlos Eduardo Castillo UrbanoPas encore d'évaluation
- Diagnostico Del Municipio de CaquiaviDocument14 pagesDiagnostico Del Municipio de CaquiaviVanessa E. Orihuela0% (1)
- Sistema CirculatorioDocument6 pagesSistema CirculatorioPriscilla García OsorioPas encore d'évaluation
- Milena Picado Rossi - Conjugaciones Dislocadas - Costa RicaDocument16 pagesMilena Picado Rossi - Conjugaciones Dislocadas - Costa RicaJazmin Cato SosaPas encore d'évaluation
- Marco TeóricoDocument5 pagesMarco TeóricoGALVEZ LOPEZ RODRIGO ANTHONYPas encore d'évaluation
- Escala de Fuentes de Estrés en Profesores Universitarios EFEPUDocument1 pageEscala de Fuentes de Estrés en Profesores Universitarios EFEPUFernandoFonAlva100% (1)
- Ensayo ElianaDocument11 pagesEnsayo ElianaJose CarvajalPas encore d'évaluation
- Creatividad DE LA EDUCACIÓN INICIALDocument15 pagesCreatividad DE LA EDUCACIÓN INICIALMarielvis CabezaPas encore d'évaluation
- Foro 1 InglessDocument4 pagesForo 1 InglessKika RinconPas encore d'évaluation
- Funciones Matemática de Excel - luceRODocument4 pagesFunciones Matemática de Excel - luceROLucerito Arias SanchezPas encore d'évaluation
- 5to - Ed - Física - Raúl ValverdeDocument8 pages5to - Ed - Física - Raúl ValverdeJesel NievesPas encore d'évaluation
- Preguntero OratoriaDocument26 pagesPreguntero Oratoriaale80% (5)
- (PDF) Cuaderno de Ejercicios - Semana 4Document14 pages(PDF) Cuaderno de Ejercicios - Semana 4Angel May MagañaPas encore d'évaluation
- Resumen de Planeamiento de La Primera Unidad ExamensDocument3 pagesResumen de Planeamiento de La Primera Unidad ExamensR Manuel Taipe HancoPas encore d'évaluation
- Diagnostico Inicial JFKDocument21 pagesDiagnostico Inicial JFKJessica Paulina Uribe GomezPas encore d'évaluation
- Etica GUÍA 2 - 2022 ACTUALIZADODocument11 pagesEtica GUÍA 2 - 2022 ACTUALIZADORashel VelezPas encore d'évaluation
- Consideraciones Sobre DeflexionDocument6 pagesConsideraciones Sobre DeflexionAnonymous f3rjIvdLPas encore d'évaluation