Vous aimerez peut-être aussi
- 400 Bad Request URL IncorrectDocument1 page400 Bad Request URL IncorrectBasil Francis AlajidPas encore d'évaluation
- Read MeDocument49 pagesRead MePriyawan SukisnoPas encore d'évaluation
- Optical Network Architectures OverviewDocument37 pagesOptical Network Architectures OverviewThe_SurferPas encore d'évaluation
- 8148745Document104 pages8148745Ferdinand AttaPas encore d'évaluation
- Introduction to Network Simulator 3 (NS-3Document11 pagesIntroduction to Network Simulator 3 (NS-3Jorge PosadaPas encore d'évaluation
- Problem Formulation 16032015Document28 pagesProblem Formulation 16032015Ferdinand AttaPas encore d'évaluation
- pdfpc demo overviewDocument45 pagespdfpc demo overviewFerdinand AttaPas encore d'évaluation
- Reminder: Homework 2 Due On Thursday Questions?: Tuesday, February 7 CS 430 Artificial Intelligence - Lecture 9 1Document29 pagesReminder: Homework 2 Due On Thursday Questions?: Tuesday, February 7 CS 430 Artificial Intelligence - Lecture 9 1Ferdinand AttaPas encore d'évaluation
- Components and Technologies for WDM NetworksDocument45 pagesComponents and Technologies for WDM NetworksFerdinand AttaPas encore d'évaluation
- Abstract and Literature ReviewDocument2 pagesAbstract and Literature ReviewFerdinand AttaPas encore d'évaluation
- Ashby How To Write A PaperDocument47 pagesAshby How To Write A PaperGauri RanadivePas encore d'évaluation
- Ijert Ijert: A Study of Research Tools and Techniques in Network Congestion ControlDocument5 pagesIjert Ijert: A Study of Research Tools and Techniques in Network Congestion ControlFerdinand AttaPas encore d'évaluation
- Structuring SentencesDocument1 pageStructuring SentencesFerdinand AttaPas encore d'évaluation
- Organise Your Literature ReviewDocument2 pagesOrganise Your Literature ReviewFerdinand AttaPas encore d'évaluation
- Template Casual OrangeDocument4 pagesTemplate Casual OrangeDiego MorenoPas encore d'évaluation
- Template Classic Green-RightDocument4 pagesTemplate Classic Green-RightFerdinand AttaPas encore d'évaluation
- Template Oldstyle GreyDocument4 pagesTemplate Oldstyle GreyFerdinand AttaPas encore d'évaluation
- DocsDocument1 pageDocsFerdinand AttaPas encore d'évaluation
- Article StandardDocument2 pagesArticle StandardFerdinand AttaPas encore d'évaluation
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5783)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (72)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (265)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (119)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Yara Crop Nutrition For HorticultureDocument8 pagesYara Crop Nutrition For HorticultureadjiePas encore d'évaluation
- SynopsisDocument13 pagesSynopsisharivijay ranmalePas encore d'évaluation
- User Manual ConsoleDocument45 pagesUser Manual Consoledhana0809Pas encore d'évaluation
- PLOTINUS: On Beauty (Essay On The Beautiful)Document12 pagesPLOTINUS: On Beauty (Essay On The Beautiful)Frederic LecutPas encore d'évaluation
- 02 - AFT - Know Your Pump & System Curves - Part 2ADocument8 pages02 - AFT - Know Your Pump & System Curves - Part 2AAlfonso José García LagunaPas encore d'évaluation
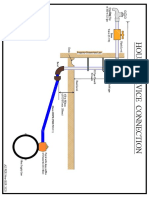
- House Service Connection NEW BSR 2020-1Document1 pageHouse Service Connection NEW BSR 2020-1Deshraj BairwaPas encore d'évaluation
- Esquematicos CaterpillarDocument9 pagesEsquematicos Caterpillarluis alberto rodriguez100% (1)
- Environmental Design BasisDocument31 pagesEnvironmental Design BasisNBTC Tubes & PipesPas encore d'évaluation
- Interaction of Radiation With Matter: Dhruba GuptaDocument36 pagesInteraction of Radiation With Matter: Dhruba GuptaHala SweetPas encore d'évaluation
- Danniel Martinez Gonzalez - Gizmo: Seasons: Earth, Moon and Sun Activity B Due 2.3 Deadline 3.1Document3 pagesDanniel Martinez Gonzalez - Gizmo: Seasons: Earth, Moon and Sun Activity B Due 2.3 Deadline 3.1dannielPas encore d'évaluation
- ADAMHAND8A4Document11 pagesADAMHAND8A4Elker José Camargo100% (1)
- English Terms 1 Major Assessment Worksheet Answer KeyDocument29 pagesEnglish Terms 1 Major Assessment Worksheet Answer KeySamiPas encore d'évaluation
- Ahmed 2022Document20 pagesAhmed 2022Mariela Estefanía Marín LópezPas encore d'évaluation
- Lectures On Quadratic FormsDocument170 pagesLectures On Quadratic FormsyusamengPas encore d'évaluation
- Introduction To The Philosophy of Science First PartDocument138 pagesIntroduction To The Philosophy of Science First PartChandra Sekhar Sahu100% (1)
- Sports AcousticsDocument43 pagesSports Acousticssiddhant raoPas encore d'évaluation
- Me 6401 Kom - Uti Ans KeyDocument11 pagesMe 6401 Kom - Uti Ans Keylogeshboy007100% (1)
- 01 UM Nutrition Training PlanDocument11 pages01 UM Nutrition Training PlanJohn Leclair100% (2)
- Simple LED Flasher CircuitsDocument5 pagesSimple LED Flasher CircuitsVivek BPas encore d'évaluation
- 10 Tips To Protect Yourself From Unhealthy AirDocument2 pages10 Tips To Protect Yourself From Unhealthy AirAnonymous XuFb6TPas encore d'évaluation
- Tabel Benkelman Beam Baru - AsisDocument21 pagesTabel Benkelman Beam Baru - AsisAsisPas encore d'évaluation
- #4 Types of Food, Ingredients and Procedures.Document7 pages#4 Types of Food, Ingredients and Procedures.Peter GonzálezPas encore d'évaluation
- Greek MathemaDocument6 pagesGreek MathemaSebastian GhermanPas encore d'évaluation
- Curriculum Vitae of Masilo ModibaDocument11 pagesCurriculum Vitae of Masilo Modibalevy2011Pas encore d'évaluation
- Ashrae 62.1-2019Document92 pagesAshrae 62.1-2019Alejandro Castillo100% (16)
- Router ScriptDocument10 pagesRouter ScriptfahadPas encore d'évaluation
- Sir ClanDocument109 pagesSir ClanJames AbendanPas encore d'évaluation
- A Project Report On: "Recreation Club"Document80 pagesA Project Report On: "Recreation Club"Appz100% (2)
- Papaya Burger - Chapter 1 6Document129 pagesPapaya Burger - Chapter 1 6Nicole Velasco NuquiPas encore d'évaluation
- Week 2 - Risk AssessmentDocument35 pagesWeek 2 - Risk AssessmentTahir BashirPas encore d'évaluation