Vous aimerez peut-être aussi
- Microprocessor System Design: A Practical IntroductionD'EverandMicroprocessor System Design: A Practical IntroductionPas encore d'évaluation
- Linear IC Applications: A Designer's HandbookD'EverandLinear IC Applications: A Designer's HandbookÉvaluation : 4 sur 5 étoiles4/5 (1)
- SADGUNmajortheory MiniDocument52 pagesSADGUNmajortheory MiniKotagiri AravindPas encore d'évaluation
- A Review On Reversible Logic Gates and Their ImplementationDocument7 pagesA Review On Reversible Logic Gates and Their ImplementationAnas RazzaqPas encore d'évaluation
- Intel 8086 and Support Chips: AppendixDocument6 pagesIntel 8086 and Support Chips: AppendixLascu Mihai SebastianPas encore d'évaluation
- Universidad Del Magdalena Ingeniería Electrónica Diseño de Sistemas Digitales - Actividad Asincrónica 3Document3 pagesUniversidad Del Magdalena Ingeniería Electrónica Diseño de Sistemas Digitales - Actividad Asincrónica 3Angélica SamperPas encore d'évaluation
- SADGUNmajortheoryDocument51 pagesSADGUNmajortheoryKotagiri AravindPas encore d'évaluation
- Design of A Quadrature Decodercounter Interface Ic For Motor ConDocument6 pagesDesign of A Quadrature Decodercounter Interface Ic For Motor ConAmol ElectronicaPas encore d'évaluation
- A New Design For Array Multiplier With Trade Off in Power and AreaDocument6 pagesA New Design For Array Multiplier With Trade Off in Power and Areavenkat301485Pas encore d'évaluation
- Optoelectronic Reservoir Computing: Scientific ReportsDocument6 pagesOptoelectronic Reservoir Computing: Scientific ReportsGeraud Russel Goune ChenguiPas encore d'évaluation
- VHDL Implementation of BIST Technique in UART DesignDocument5 pagesVHDL Implementation of BIST Technique in UART DesignRakesh GeorgePas encore d'évaluation
- Adpll JSSC 2007Document11 pagesAdpll JSSC 2007陳育楷Pas encore d'évaluation
- International Journal of Engineering and Science Invention (IJESI)Document4 pagesInternational Journal of Engineering and Science Invention (IJESI)inventionjournalsPas encore d'évaluation
- Interpolator For A Computer Numerical Control System: IEEE Transactions On Computers February 1976Document7 pagesInterpolator For A Computer Numerical Control System: IEEE Transactions On Computers February 1976Kamal JaswalPas encore d'évaluation
- Arithmetic & Logic Unit (ALU) Design Using Reversible Control UnitDocument6 pagesArithmetic & Logic Unit (ALU) Design Using Reversible Control UnitasutoshpatPas encore d'évaluation
- SPEED CHECKER FOR HI-WAsYSDocument26 pagesSPEED CHECKER FOR HI-WAsYSAbhinav KumaarPas encore d'évaluation
- Trancated Multiplier PeprDocument5 pagesTrancated Multiplier PeprJagannath KbPas encore d'évaluation
- Ofc Lab Manual 2Document21 pagesOfc Lab Manual 2Shobhit JainPas encore d'évaluation
- DC Unit OneDocument33 pagesDC Unit OneYekanth Kola100% (1)
- MHZ 1-Micron Cmos Pipelined 8-Bit Adder Using True Single-Phase Logic-Flip-FlopsDocument4 pagesMHZ 1-Micron Cmos Pipelined 8-Bit Adder Using True Single-Phase Logic-Flip-FlopsMamta JatoliaPas encore d'évaluation
- Project BookDocument68 pagesProject Bookbabuhajju18Pas encore d'évaluation
- Arkadiy Morgenshtein', Alexander Fish2 and Israel A. Wagner'Document4 pagesArkadiy Morgenshtein', Alexander Fish2 and Israel A. Wagner'Sathish KumarPas encore d'évaluation
- Asynchronous Microcontroller Simulation Model in VHDL: M. KovacDocument4 pagesAsynchronous Microcontroller Simulation Model in VHDL: M. KovacIacob CiprianPas encore d'évaluation
- Speed Detector For HighwaysDocument29 pagesSpeed Detector For HighwaysShama MahinPas encore d'évaluation
- Analysis & Design of Different Astable Multivibrator Circuits For Various Applications in Communication SystemDocument5 pagesAnalysis & Design of Different Astable Multivibrator Circuits For Various Applications in Communication SystemijsretPas encore d'évaluation
- Application Note XC9572XLDocument6 pagesApplication Note XC9572XLSidharth ChaturvedyPas encore d'évaluation
- Microcontrollers 2017-18 Lab ManualDocument58 pagesMicrocontrollers 2017-18 Lab ManualSUNIL KUMAR100% (1)
- Digital Logic Handbook 1967Document427 pagesDigital Logic Handbook 1967kgrhoadsPas encore d'évaluation
- Syeda HusnaDocument31 pagesSyeda HusnaSyeda HusnaPas encore d'évaluation
- Stand-Alone Microprocessor-Based Optical Data Acquisition SystemDocument4 pagesStand-Alone Microprocessor-Based Optical Data Acquisition SystemApangshu DasPas encore d'évaluation
- LS 4Document4 pagesLS 4RohanthPas encore d'évaluation
- DSDV 18ec644Document5 pagesDSDV 18ec644Abhishek nPas encore d'évaluation
- Pc-Cluster-Based Real-Time Simulation of An 8-Synchronous Machine Network With HVDC Link Using Rt-Lab and TestdriveDocument6 pagesPc-Cluster-Based Real-Time Simulation of An 8-Synchronous Machine Network With HVDC Link Using Rt-Lab and TestdrivelekasanshithaPas encore d'évaluation
- Introduction To Reversible Logic Gates & Its Application: Prashant .R.Yelekar Prof. Sujata S. ChiwandeDocument5 pagesIntroduction To Reversible Logic Gates & Its Application: Prashant .R.Yelekar Prof. Sujata S. ChiwandeVani YamaniPas encore d'évaluation
- Microcontroller Based Digital Code Lock REPORTDocument50 pagesMicrocontroller Based Digital Code Lock REPORTMithun Kumar MPas encore d'évaluation
- 2011 Ieee ConferenceDocument4 pages2011 Ieee ConferenceNEHA DALAKOTI 2K21/PHDEC/18Pas encore d'évaluation
- Waste Management Using Solar Smart Bin: Chandradeep Tiwari Smt. Nagarathna. KDocument4 pagesWaste Management Using Solar Smart Bin: Chandradeep Tiwari Smt. Nagarathna. KsachPas encore d'évaluation
- Research Inventy: International Journal of Engineering and ScienceDocument5 pagesResearch Inventy: International Journal of Engineering and ScienceresearchinventyPas encore d'évaluation
- MC14500B Industrial Control Unit Handbook 1977Document113 pagesMC14500B Industrial Control Unit Handbook 1977FLAVIO100% (1)
- DSD Lab ManualDocument49 pagesDSD Lab Manualshailygoyal50% (2)
- Instrumentation IIDocument17 pagesInstrumentation IIClasherPas encore d'évaluation
- Verilog Implementation of Reversible Logic GateDocument7 pagesVerilog Implementation of Reversible Logic GateDhamini GowdaPas encore d'évaluation
- Unit 3 - VLSI Design - WWW - Rgpvnotes.in PDFDocument12 pagesUnit 3 - VLSI Design - WWW - Rgpvnotes.in PDFAbhinav Pratap SinghPas encore d'évaluation
- CIRED2011 1286 Final Universidad de OviedoDocument4 pagesCIRED2011 1286 Final Universidad de OviedopipotxPas encore d'évaluation
- Intelligent Water Control System Using 8051 (AT89C51) : Project ReportDocument12 pagesIntelligent Water Control System Using 8051 (AT89C51) : Project ReportNadeem AnjumPas encore d'évaluation
- Cdma Reverselink Waveform Generator Fpga For Production Transmit Path TestsDocument9 pagesCdma Reverselink Waveform Generator Fpga For Production Transmit Path Testsxiao zhanPas encore d'évaluation
- Implementation of 2-Bit Multiplier Circuit Using Pass Transistor LogicDocument10 pagesImplementation of 2-Bit Multiplier Circuit Using Pass Transistor LogicIJRASETPublicationsPas encore d'évaluation
- Ic Tester Using Pic MicrocontrollerDocument4 pagesIc Tester Using Pic MicrocontrolleresatjournalsPas encore d'évaluation
- Picaxe-18X Datalogger (Axe110) : RevolutionDocument12 pagesPicaxe-18X Datalogger (Axe110) : RevolutionErnesto Diaz RamosPas encore d'évaluation
- Automatic Room Light Controller.Document17 pagesAutomatic Room Light Controller.Dhinesh_90Pas encore d'évaluation
- Microcontroller Based Digital Code Lock: Bachelor of TechnologyDocument50 pagesMicrocontroller Based Digital Code Lock: Bachelor of TechnologyjoPas encore d'évaluation
- Design and Implementation of 2bit Vedic Multiplier at 16nm Using PTL LogicDocument5 pagesDesign and Implementation of 2bit Vedic Multiplier at 16nm Using PTL LogicKshitij SharmaPas encore d'évaluation
- "Speed Control and Protection of Induction Motor Using Internet of ThingDocument34 pages"Speed Control and Protection of Induction Motor Using Internet of ThingDarshan0% (1)
- Ijert Ijert: Implementation of Interleaving Switch Based Architecture For System On ChipDocument7 pagesIjert Ijert: Implementation of Interleaving Switch Based Architecture For System On ChipAkhila ReddyPas encore d'évaluation
- Embedded LAB MANUALDocument217 pagesEmbedded LAB MANUALPinak RoyPas encore d'évaluation
- Mca Etc Jdcoem Lab Manual AkiDocument26 pagesMca Etc Jdcoem Lab Manual AkiAshwini MatePas encore d'évaluation
- Cesar Dias - Artigo - MIC06 (Versão Final)Document4 pagesCesar Dias - Artigo - MIC06 (Versão Final)Eng_CesarPas encore d'évaluation
- Quick Guide To CPX-FB13 ProfibusDPV A2xDocument2 pagesQuick Guide To CPX-FB13 ProfibusDPV A2xbeforeRG100% (1)
- Lecture04-Non-ideal Op Amps (Feedback Circuit) PDFDocument9 pagesLecture04-Non-ideal Op Amps (Feedback Circuit) PDFUdai ValluruPas encore d'évaluation
- Fact Sheet Autocad Fundamentals Certificate PDFDocument4 pagesFact Sheet Autocad Fundamentals Certificate PDFPhops FrealPas encore d'évaluation
- Cprog 08Document7 pagesCprog 08gastonePas encore d'évaluation
- IVMS-4200 AC Client Software Datasheet V1.0.1 20190712Document4 pagesIVMS-4200 AC Client Software Datasheet V1.0.1 20190712HEHHPas encore d'évaluation
- Operating Systems ENN 205Document14 pagesOperating Systems ENN 205Mohit KumarPas encore d'évaluation
- The PR4G VHF ECCM System Extensive Tactical Communications For The BattlefieldDocument5 pagesThe PR4G VHF ECCM System Extensive Tactical Communications For The BattlefieldHung Nguyen0% (1)
- (Esquema) Ba41-00809a (Gce) Ba41-00810a (Nanya) Hainan3 - Ext Rev1.0Document53 pages(Esquema) Ba41-00809a (Gce) Ba41-00810a (Nanya) Hainan3 - Ext Rev1.0Keven silvaPas encore d'évaluation
- Better Ansible Network Automation With Roles and Custom ModulesDocument22 pagesBetter Ansible Network Automation With Roles and Custom Modulesstanislaw.jachuraPas encore d'évaluation
- Software Engineer C++ FRIEND MTSDocument2 pagesSoftware Engineer C++ FRIEND MTSvictor marotoPas encore d'évaluation
- Expense TrackerDocument4 pagesExpense Trackernakibkhan8252Pas encore d'évaluation
- IP ProjectDocument8 pagesIP ProjectDivyanshi YadavPas encore d'évaluation
- 74HC HCT154Document20 pages74HC HCT154CRISTIAN SORACAPas encore d'évaluation
- IntroductionDocument10 pagesIntroductionsanthoshPas encore d'évaluation
- S4875G1 User Manual V1.0Document4 pagesS4875G1 User Manual V1.0Thịnh NguyễnPas encore d'évaluation
- Course Outline - Operating SystemsDocument5 pagesCourse Outline - Operating SystemsYano NettlePas encore d'évaluation
- SR6011 Service enDocument197 pagesSR6011 Service enToshio HirahataPas encore d'évaluation
- 02-Wireless Low Cost Power Monitoring and Management SystemDocument50 pages02-Wireless Low Cost Power Monitoring and Management SystemAvetri VigneshwaranPas encore d'évaluation
- ELECTRIFY EV Charger 160KWDocument1 pageELECTRIFY EV Charger 160KWShah SNHPas encore d'évaluation
- 8051 Instruction SetDocument98 pages8051 Instruction SetSmt.N.Vasantha Gowri Assistant ProfessorPas encore d'évaluation
- Salient Features: Portable Inclusion & Value Based Planner (With Cavity Mapping)Document2 pagesSalient Features: Portable Inclusion & Value Based Planner (With Cavity Mapping)vijaymorPas encore d'évaluation
- A Development Platform For Microcontroller STM32F103Document67 pagesA Development Platform For Microcontroller STM32F103picatilioPas encore d'évaluation
- Incident CountermeasureDocument3 pagesIncident CountermeasureVon Gary RasPas encore d'évaluation
- Taw12 2Document2 pagesTaw12 2Amol NagapPas encore d'évaluation
- GPS - TEC Readme PDFDocument9 pagesGPS - TEC Readme PDFIlham MalikPas encore d'évaluation
- ImageresDocument4 pagesImageresNikoLa BluZer NeŠićPas encore d'évaluation
- What Is Java Native InterfaceDocument4 pagesWhat Is Java Native InterfaceeliaezekielPas encore d'évaluation
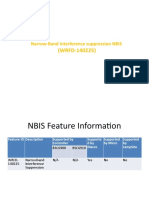
- Narrow-Band Interference Suppression (NBIS)Document20 pagesNarrow-Band Interference Suppression (NBIS)monem777Pas encore d'évaluation
- OFSAAI 7.3.3.0.0 Installation and Configuration GuideDocument172 pagesOFSAAI 7.3.3.0.0 Installation and Configuration GuidedsocolPas encore d'évaluation
- CPH 6316Document5 pagesCPH 6316bojan 2Pas encore d'évaluation