Vous aimerez peut-être aussi
- CRT Syllabus - Topics To Be CoveredDocument1 pageCRT Syllabus - Topics To Be CoveredHemanth JPas encore d'évaluation
- GATE 2014 Exam Admit Card: Examination Centre (7003)Document1 pageGATE 2014 Exam Admit Card: Examination Centre (7003)Hemanth JPas encore d'évaluation
- Hemanth GATE ResumeDocument3 pagesHemanth GATE ResumeHemanth JPas encore d'évaluation
- Mosca Tell IDocument16 pagesMosca Tell IHemanth JPas encore d'évaluation
- Local Energy-Based Multimodal Medical Image Fusion in Curvelet DomainDocument15 pagesLocal Energy-Based Multimodal Medical Image Fusion in Curvelet DomainHemanth JPas encore d'évaluation
- ESTP GuidelinesDocument3 pagesESTP GuidelinesHemanth JPas encore d'évaluation
- PHD Result PDFDocument364 pagesPHD Result PDFHemanth JPas encore d'évaluation
- Quantitative Ability Reasoning Ability Verbal Ability: Que Ans Que Ans Que Ans Que Ans Que Ans QueDocument2 pagesQuantitative Ability Reasoning Ability Verbal Ability: Que Ans Que Ans Que Ans Que Ans Que Ans QueHemanth JPas encore d'évaluation
- Layer-Based Approach For Image Pair Fusion: Chang-Hwan Son and Xiao-Ping Zhang, Senior Member, IEEEDocument16 pagesLayer-Based Approach For Image Pair Fusion: Chang-Hwan Son and Xiao-Ping Zhang, Senior Member, IEEEHemanth JPas encore d'évaluation
- Semiconductor Materials Too GoodDocument5 pagesSemiconductor Materials Too GoodHemanth JPas encore d'évaluation
- Personality Test: My Goals in Life Are ClearDocument9 pagesPersonality Test: My Goals in Life Are ClearHemanth J100% (2)
- K V Rao Verbal New TTDocument1 pageK V Rao Verbal New TTHemanth JPas encore d'évaluation
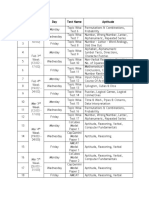
- Feb 2 Week (05/02 - 10/02) : S.No. Week Day Test Name AptitudeDocument2 pagesFeb 2 Week (05/02 - 10/02) : S.No. Week Day Test Name AptitudeHemanth JPas encore d'évaluation
- List of Contents: 2.1evolution of Middleware 4 2.2 Architecture 5Document2 pagesList of Contents: 2.1evolution of Middleware 4 2.2 Architecture 5Hemanth JPas encore d'évaluation
- Adaptive Morphological Filtering Method For Structural Fusion Restoration of Hyperspectral ImagesDocument13 pagesAdaptive Morphological Filtering Method For Structural Fusion Restoration of Hyperspectral ImagesHemanth JPas encore d'évaluation
- S-Type & Wheel Chairs Maintenance Work: S.No. Particulars Quantity Each Rs. Amount RsDocument1 pageS-Type & Wheel Chairs Maintenance Work: S.No. Particulars Quantity Each Rs. Amount RsHemanth JPas encore d'évaluation
- Group Disscusion Part 111Document14 pagesGroup Disscusion Part 111Hemanth JPas encore d'évaluation
- Placement QuestionsDocument21 pagesPlacement QuestionsHemanth JPas encore d'évaluation
- International Business Machines CorporationDocument1 pageInternational Business Machines CorporationHemanth JPas encore d'évaluation
- CoCubes SyllabusDocument1 pageCoCubes SyllabusHemanth JPas encore d'évaluation
- An Efficient Tree-Based Self-Organizing Protocol For Internet of ThingsDocument13 pagesAn Efficient Tree-Based Self-Organizing Protocol For Internet of ThingsHemanth JPas encore d'évaluation
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (345)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- New Techniques of Predictions # 1Document5 pagesNew Techniques of Predictions # 1bhagathi nageswara raoPas encore d'évaluation
- Apple Witness ListDocument30 pagesApple Witness ListMikey CampbellPas encore d'évaluation
- 14 ComputoDocument549 pages14 ComputoEver Henry FloresPas encore d'évaluation
- No 1 Method ValidationDocument2 pagesNo 1 Method ValidationdanaciortanPas encore d'évaluation
- Synchronous Motor AC DrivesDocument40 pagesSynchronous Motor AC DrivesHarshal Thakur100% (1)
- SITRUST Brochure PDFDocument8 pagesSITRUST Brochure PDFÐôùxBébê Ðê MãmäñPas encore d'évaluation
- EagleBurgmann H7N ENDocument5 pagesEagleBurgmann H7N ENlamtony2013Pas encore d'évaluation
- Geometallurgical Modelling of The Collahuasi Flotation CircuitDocument6 pagesGeometallurgical Modelling of The Collahuasi Flotation CircuitFrancisco CampbellPas encore d'évaluation
- SRMDocument4 pagesSRMinocente333Pas encore d'évaluation
- Fame and FortuneDocument8 pagesFame and FortuneNguyễn Đình Tuấn ĐạtPas encore d'évaluation
- Section 02870 Site FurnishingsDocument19 pagesSection 02870 Site FurnishingsMØhãmmed ØwięsPas encore d'évaluation
- Cibse TM65 (2020)Document67 pagesCibse TM65 (2020)Reli Hano100% (1)
- Etrade Bank-StatementDocument5 pagesEtrade Bank-StatementMark Galanty100% (4)
- FOCGB5 Rtest 1-6BDocument3 pagesFOCGB5 Rtest 1-6BM-DPas encore d'évaluation
- METR3210 Clausius ClapeyronDocument28 pagesMETR3210 Clausius Clapeyronshubhang2392Pas encore d'évaluation
- Siasun Company IntroDocument34 pagesSiasun Company IntromoneeshveeraPas encore d'évaluation
- Overcoming Obstacles To Ethical BehaviourDocument4 pagesOvercoming Obstacles To Ethical BehaviourSimran SinghPas encore d'évaluation
- CC Course IntroDocument11 pagesCC Course IntroSaid TahatPas encore d'évaluation
- Press Releases Are Not A PR Strategy An Executive Annas ArchiveDocument200 pagesPress Releases Are Not A PR Strategy An Executive Annas Archivehelenajosemacuacua31Pas encore d'évaluation
- Physics 16 - Thermal ProcessesDocument19 pagesPhysics 16 - Thermal ProcessesSuhaan HussainPas encore d'évaluation
- Nassaji - Schema TheoryDocument37 pagesNassaji - Schema TheoryAtiq AslamPas encore d'évaluation
- Word Formation ListDocument8 pagesWord Formation ListpaticiaPas encore d'évaluation
- PCI Express Test Spec Platform 3.0 06182013 TSDocument383 pagesPCI Express Test Spec Platform 3.0 06182013 TSDeng XinPas encore d'évaluation
- Morphometric Characterization of Jatropha Curcas Germplasm of North-East IndiaDocument9 pagesMorphometric Characterization of Jatropha Curcas Germplasm of North-East IndiafanusPas encore d'évaluation
- Oct2020 GCE Final PDFDocument30 pagesOct2020 GCE Final PDFGavinPas encore d'évaluation
- Norsok Well IntegrityDocument162 pagesNorsok Well IntegrityAshish SethiPas encore d'évaluation
- Gerrard 1966Document13 pagesGerrard 1966AnandhuMAPas encore d'évaluation
- Adiba Final Activity CousellingDocument29 pagesAdiba Final Activity Cousellingadiba KhanPas encore d'évaluation
- Vocabulary Levels Tests Versions 1 2Document12 pagesVocabulary Levels Tests Versions 1 2Rangsiya PjewPas encore d'évaluation
- T. Murugan: Post Applied For Well Testing OperatorDocument5 pagesT. Murugan: Post Applied For Well Testing Operatorjohn MPas encore d'évaluation