International Journal of Trend in Scientific
Research and Development (IJTSRD)
International Open Access Journal
ISSN No: 2456 - 6470 | www.ijtsrd.com | Volume - 2 | Issue – 3
Abnormal Driving Behaviors detection with smart phones
1
Dr. B. Srinivasa Rao, 2U. Sri Devi
Devi, 3K. Sri Satya Harsha, 4A. Rakesh, 5K. Muralidhar
1
Professor & Head of Department,
1,2,3,4,5
,2,3,4,5
Department of Computer Science,
Dhanekula Institute of Engineering
ngineering and Technology, Gangur, Andhra Pradesh,
Pradesh India
ABSTRACT
Abnormal driving behaviors detection is a key stone Going along this direction we considered the
for reducing accidents. There are several existing Smartphone sensors (accelerometer and orientation
works for abnormal driving detection which uses high sensors) which are in-built
built sensors
se for many android
cost sensors to check whether the driver is in normal phones. With the help of these sensors we extract the
state or in drunken state. In this paper we would like features for all abnormal driving behaviors which will
to introduce a low cost technique for detecting be useful for distinguishing the abnormal driving
abnormal driving behaviorss with the use of some in behaviors from normal ones.
built Smartphone sensors. With the information
collected from the sensors we will employ the This has a wide scope for development if these
the results
machine learning technique (SVM and KNN) to are monitored by Government for identifying rash
extract the features and for generating a classifier driving actions which leads to accidents. The
model. We will send the alerts if abnormabnormality is government can also collect the fines from the people
detected. who are identified to be driving abnormal. It can also
be used by the car owners for analyzing the t status of
Keywords: Abnormal Driving behaviors; SVM their drivers. According to [1] there are six types of
(Support Vector Machine); KNN(k
KNN(k-Nearest abnormal driving behaviors which are Weaving ,
Neighbors); Smart phone sensors; sending alerts Swerving, Side-slipping,
slipping, Fast U-turn,
U turning with
wide radius, Sudden braking. These six types of
INTRODUCTION driving behaviors have unique patterns. In this work,
firstly we will collect the data from some experienced
According to Annual Global Road Crash Statistics
drivers by employing all the types of abnormal
2017, nearly 1.3 million people die in accidents each
driving behaviors through Smartphone. We perform
year which indicates that on average 3,287 deaths a
machine learning to generate a classifier model which
day. In addition to that 20-50
50 million are injured are
helps in extracting the features for detecting
de abnormal
disabled. It also states that road accidents is the 9 th
driving behaviors.
leading cause for deaths. If corresponding actions are
not taken road accidents ts are predicted to be the 5th
leading cause for deaths.
Although there has been many works on abnormal
driving behaviors they focus mainly on detecting
status of driver i.e. drunk, drowsy or fatigue. Since
smart phones are used widely now-a-days,
days, we would
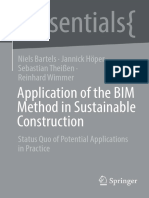
like to develop an android application which detect Fig 1 :(a) weaving, (b)swerving, (c)Side slipping, (d)
the abnormal driving behavior and sends an alert if Fast U-turn,
turn, (e) Turning with a wide radius, (f)
any such case is found. Sudden braking
@ IJTSRD | Available Online @ www.ijtsrd.com | Volume – 2 | Issue – 3 | Mar-Apr
Apr 2018 Page: 1384
International Journal of Trend in Scientific Research and Development (IJTSRD) ISSN: 2456-6470
2456
RELATED WORK SYSTEM DESIGN
Nidhi Kalra et al. [2014] have studied that in today's In this section the design of our proposed system
life, everyone seems to be in hurry to achieve their which detects abnormal driving behaviors using smart
destination as quickly as doable. Therefore phones is described. Our system does not require any
individuals advisedly or accidentally take harsh additional hardware like alcohol sensors or video
driving events like unforeseen acceleration, capturing devices for detecting abnormal driving
unforeseen turns or unforeseen brakes that more lead behaviors.
them to accidents or maybe loss of their llives. And it's
a typical belief that if person behaviour was being
monitored, it might be comparatively safer. To watch
driver behaviour numerous sensors were getting used
either deployed within the automotive, wayside or
inherent in Smartphone.This paper conjointly
provides some analysis directions that numerous
researchers will explore.
Prarna Dhar et al. [2014] have studied the Unsafe
driving primarily includes driving either headlong or Fig 2: System architecture
driving below the Influence (DUI) of alcohol, may be
Figure 2 shows the architecture of our system. We
a major reason
ason for traffic accidents throughout the
divide the architecture of our system into two phases
planet. During this paper, we advise an extremely
which are offline phase which includes modeling
system that helps at early detection and alert of
abnormal driving behaviors and online phase which
dangerous vehicle manoeuvres usually associated
includes monitoring of abnormal driving behaviors.
with rash driving. The complete system needs solely
an itinerant which
hich can be placed in vehicle and with In the offline part we train a classifier model using
its inherent measuring system and orientation sensing machine learning technique que basing on the data
element. When putting in a program on the itinerant, collected. In the feature extraction different features
it'll cypher accelerations supported sensing element are extracted from the collected data using
readings and compares them with typical unsafe accelerometer and orientation sensor. After the feature
driving patterns
tterns extracted from real driving tests. extraction the features are trained in the training part
Rachana Daigavane et al. [2015] has studied and and generate a classifier
ifier model. The final output of
discovers the most causes of accidents and so the offline phase is the model which is stored in a
provides risk assessments thus, serving to cut back database.
careless driving and enforce safe driving practices.
Showing determination
ination behaviour and energetic In the online phase to monitor the abnormal driving
pursuit of your ends was presently a causal agency of behaviors, the developed application is installed in the
traffic in an urban centre. Awareness and encourage smart phones which sense the values from
driver safety square measure the measures that square accelerometer
ter and orientation sensors. After sensing
measure further, we have a tendency to square the values from the real time driving, co-ordinates
co are
measure shall proposeose a decent arrangement that uses arranged along the direction of the vehicle from the
detection system and management of the vehicle. For beginning to ending of driving phase. Afterwards in
the foremost half, drivers aren't aware that they offer the identification phase we extract the features from
fro
disposition to behave sharply activity found within the real time driving and employ the classifier model to
normal course of events. Among the factors check whether abnormal driving behaviors occurred.
concerned in driving,
riving, particularly the motive force, If any of the abnormal driving behaviors are detected
the vehicle, and also the surroundings, the human then an alert message will be sent to the specified
issue is that the most relevant and most troublesome number. For the features extraction we used support
to characterize. This project wasn't solely helpful for vector machine (SVM) and k-nearestk neighbors
the motive force's behaviour detection however (KNN).
conjointly offer reconstruction and investigation of
accidents and during this thanks to cut back the risks
and dangers for the driver.
@ IJTSRD | Available Online @ www.ijtsrd.com | Volume – 2 | Issue – 3 | Mar-Apr
Apr 2018 Page: 1385
International Journal of Trend in Scientific Research and Development (IJTSRD) ISSN: 2456-6470
2456
MODULES accy varies from beginning to ending. This implies
that range of accy is large.
1. Data collection from Smartphone sensors
We collect the data from Smartphone sensors through Detecting abnormal driving behaviors with smart
an android application which uses accelerometer and phone:
The figure 5 shows user interface of our application.
orientation sensor. We align the co-ordinate
ordinate axes in
We have two phases in our application namely
the direction of vehicle through which we can monitor
analysis and automatic.
the driving behaviors by retrieving the values from
sensors.
2. Low Pass Filtering
The collected data may have some noise. To remove
noise from the collected data there are many nonoise
removal techniques. In this paper we performed low
pass filtering to remove high frequency noise.
3. Analyzing Patterns
After filtering the data we analyze the patterns of
abnormal driving behaviors by considering the factors
like acceleration, range, mean and standard deviation.
The unique patterns through which we can analyze (a) (b)
different abnormal behaviors are as follows: Fig: (a) overview of application (b) screen showing
i. Weaving: acceleration.
In this pattern the acceleration along X X-axis (accx) The result of analysis
alysis phase will give the count of
fluctuates drastically for a period of time where as abnormal driving behaviors observed during the
acceleration along Y-axis (accy) remains constant. driving from beginning to ending. The automatic
This implies standard deviation and range of acc x are phase will send an alert automatically to the specified
high. number if any type of abnormal driving behaviors is
ii. Swerving: detected.
In this pattern the acceleration and orientation along
X-axis
axis varies for a short period of time which implies
that the range of accx and orix are high gh where accy and
oriy remains soft.
iii. Side slipping:
In this pattern accy falls down sharply which indicates
that range of accy is large. Moreover the value of accx
will not be zero and will be based on the side that
vehicle slips i.e. either right or left.
iv. Fast U-turn:
In this pattern the value of accx will increase at the (c) Result of analysis phase (d) Result of automatic
beginning of U-turn
turn and remains constant for a period phase.
of time and then decreases. This implies that the range
of accx is large and same is the case with orix. CONCLUSION
v. Turning with a wide radius: In this paper we developed an application to detect
In this pattern accx and orix changes for a long period abnormal driving behaviors
viors with the help of smart
of time where as the values of oriy and accy are nearly phones which does not require any pre deployed
equal to zero but not zero. This implies that range of infrastructure like alcohol sensor etc. This project has
accx and orix is large. a wide scope for development by including some
vi. Sudden braking: extra features like:
In this pattern accx and orix remains constant where as • Training Set Size
the value of accy decreases drastically. The value of • Traffic Condition
@ IJTSRD | Available Online @ www.ijtsrd.com | Volume – 2 | Issue – 3 | Mar-Apr
Apr 2018 Page: 1386
International Journal of Trend in Scientific Research and Development (IJTSRD) ISSN: 2456-6470
• Road Type
• Smartphone Placement
• Smartphone Sensors’ Sampling Rate
REFERENCES:
1. U.S.NHTSA. The visual detection of dwi
motorists.[Online].Available:http://www.shippd.or
g/Alcohol/dwibooklet.pdf
2. World.Health.Organisation. The top ten causes of
death.[Online].Available:http://www.who.int/medi
acentre/factsheets/fs310/en/
3. M. V. Yeo, X. Li, K. Shen, and E. P. Wilder-
Smith, “Can svm beused for automatic eeg
detection of drowsiness during car
driving?”Elsevier Safety Science, vol. 47, pp. 115–
124, 2009.
4. S. Al-Sultan, A. H.Al-Bayatti, and H. Zedan,
“Context-aware driver behavior detection system
in sintelligent transportaion system,” IEEE Trans.
on Vehicular Technology, vol. 62, pp. 4264–4275,
2013.
5. J. Paefgen, F. Kehr, Y. Zhai, and F. Michahelles,
“Driving behaviour analysis with smartphones:
insights from a controlled field study.”
6. Y. Wang, J. Yang, H. Liu, Y. Chen, M. Gruteser,
and R. P. Martin, “Sensing vehicle dynamics for
determining driver phone use,” inProc. ACM
MobiSys, 2013.
7. H. Han, J. Yu, H. Zhu, Y. Chen, J. Yang, Y. Zhu,
G. Xue, and M. Li, “Senspeed: Sensing driving
conditions to estimate vehicle speed in urban
environments,” in Proc. IEEE INFOCOM, 2014.
8. S. Reddy, M. Mun, J. Burke, D. Estrin, M.
Hansen, and M. Srivastava, “Using mobile phones
to determine transportation modes,” ACM Trans.
on Sensor Networks, vol. 6, no. 13, 2010.
9. J. Dai, J. Teng, X. Bai, and Z. Shen, “Mobile
phone based drunk driving detection,” in
Proc.PervasiveHealth, 2010, pp. 1–8.
10. M. Fazeen, B. Gozick, R. Dantu, M. Bhukuiya,
and M. C.Gonzalez, “Safe driving using mobile
phones,” IEEE Trans. on Intelligent
Transportation Systems, vol. 13, pp. 1462–1468,
2012
@ IJTSRD | Available Online @ www.ijtsrd.com | Volume – 2 | Issue – 3 | Mar-Apr 2018 Page: 1387
Vous aimerez peut-être aussi
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- Community Immersion Program of PNPDocument40 pagesCommunity Immersion Program of PNParlene landocan91% (11)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- Part 1: Motion Card GameDocument12 pagesPart 1: Motion Card GameNunag Mary AnnPas encore d'évaluation
- Warehouse ManagementDocument48 pagesWarehouse ManagementKetki WadhwaniPas encore d'évaluation
- Sustainable EnergyDocument8 pagesSustainable EnergyEditor IJTSRDPas encore d'évaluation
- Educational Unity Embracing Diversity For A Stronger SocietyDocument6 pagesEducational Unity Embracing Diversity For A Stronger SocietyEditor IJTSRDPas encore d'évaluation
- Design Simulation and Hardware Construction of An Arduino Microcontroller Based DC DC High Side Buck Converter For Standalone PV SystemDocument6 pagesDesign Simulation and Hardware Construction of An Arduino Microcontroller Based DC DC High Side Buck Converter For Standalone PV SystemEditor IJTSRDPas encore d'évaluation
- Collective Bargaining and Employee Prosocial Behaviour in The Hospitality Sector in Port HarcourtDocument10 pagesCollective Bargaining and Employee Prosocial Behaviour in The Hospitality Sector in Port HarcourtEditor IJTSRDPas encore d'évaluation
- Activating Geospatial Information For Sudans Sustainable Investment MapDocument13 pagesActivating Geospatial Information For Sudans Sustainable Investment MapEditor IJTSRDPas encore d'évaluation
- Differential Equations Third Order Inhomogeneous Linear With Boundary ConditionsDocument6 pagesDifferential Equations Third Order Inhomogeneous Linear With Boundary ConditionsEditor IJTSRDPas encore d'évaluation
- International Journal of Trend in Scientific Research and Development (IJTSRD)Document13 pagesInternational Journal of Trend in Scientific Research and Development (IJTSRD)Editor IJTSRDPas encore d'évaluation
- Artificial Intelligence A Boon in Expanding Online Education Through Social Media and Digital Marketing Post Covid 19Document9 pagesArtificial Intelligence A Boon in Expanding Online Education Through Social Media and Digital Marketing Post Covid 19Editor IJTSRDPas encore d'évaluation
- An Analysis On The Use of Image Design With Generative AI TechnologiesDocument4 pagesAn Analysis On The Use of Image Design With Generative AI TechnologiesEditor IJTSRDPas encore d'évaluation
- Deconstructing The Hijra Narrative Reimagining Trans Identities Through Literary PerspectivesDocument6 pagesDeconstructing The Hijra Narrative Reimagining Trans Identities Through Literary PerspectivesEditor IJTSRDPas encore d'évaluation
- Challenges Faced by The Media in An Attempt To Play Their Roles in Public Awareness On Waste Management in Buea and DoualaDocument18 pagesChallenges Faced by The Media in An Attempt To Play Their Roles in Public Awareness On Waste Management in Buea and DoualaEditor IJTSRDPas encore d'évaluation
- Women Before and After Islam With Special Reference To ArabDocument3 pagesWomen Before and After Islam With Special Reference To ArabEditor IJTSRDPas encore d'évaluation
- Challenges in Pineapple Cultivation A Case Study of Pineapple Orchards in TripuraDocument4 pagesChallenges in Pineapple Cultivation A Case Study of Pineapple Orchards in TripuraEditor IJTSRDPas encore d'évaluation
- Role of Dashamooladi Niruha Basti Followed by Katibasti in The Management of "Katigraha" W.R.S To Lumbar Spondylosis A Case StudyDocument3 pagesRole of Dashamooladi Niruha Basti Followed by Katibasti in The Management of "Katigraha" W.R.S To Lumbar Spondylosis A Case StudyEditor IJTSRDPas encore d'évaluation
- Consumers' Impulsive Buying Behavior in Social Commerce PlatformsDocument5 pagesConsumers' Impulsive Buying Behavior in Social Commerce PlatformsEditor IJTSRDPas encore d'évaluation
- A Pharmaceutical Review On Kaanji and Its Wide Range of ApplicabilityDocument6 pagesA Pharmaceutical Review On Kaanji and Its Wide Range of ApplicabilityEditor IJTSRDPas encore d'évaluation
- Sustainable Development A PrimerDocument9 pagesSustainable Development A PrimerEditor IJTSRDPas encore d'évaluation
- An Investigation of The Temperature Effect On Solar Panel Efficiency Based On IoT TechnologyDocument7 pagesAn Investigation of The Temperature Effect On Solar Panel Efficiency Based On IoT TechnologyEditor IJTSRDPas encore d'évaluation
- To Assess The Knowledge and Attitude of Non Professionals Regarding COVID 19 Vaccination A Descriptive StudyDocument4 pagesTo Assess The Knowledge and Attitude of Non Professionals Regarding COVID 19 Vaccination A Descriptive StudyEditor IJTSRDPas encore d'évaluation
- Effectiveness of Video Teaching Program On Knowledge Regarding 5Fs of Disease Transmission Food, Finger, Fluid, Fomite, Faces Among Children at Selected Setting, ChennaiDocument3 pagesEffectiveness of Video Teaching Program On Knowledge Regarding 5Fs of Disease Transmission Food, Finger, Fluid, Fomite, Faces Among Children at Selected Setting, ChennaiEditor IJTSRDPas encore d'évaluation
- Evan Syndrome A Case ReportDocument3 pagesEvan Syndrome A Case ReportEditor IJTSRDPas encore d'évaluation
- A Study To Assess The Effectiveness of Art Therapy To Reduce Depression Among Old Age Clients Admitted in Saveetha Medical College and Hospital, Thandalam, ChennaiDocument5 pagesA Study To Assess The Effectiveness of Art Therapy To Reduce Depression Among Old Age Clients Admitted in Saveetha Medical College and Hospital, Thandalam, ChennaiEditor IJTSRDPas encore d'évaluation
- H1 L1 Boundedness of Rough Toroidal Pseudo Differential OperatorDocument8 pagesH1 L1 Boundedness of Rough Toroidal Pseudo Differential OperatorEditor IJTSRDPas encore d'évaluation
- A Study On Human Resource AccountingDocument3 pagesA Study On Human Resource AccountingEditor IJTSRDPas encore d'évaluation
- Knowledge Related To Diabetes Mellitus and Self Care Practice Related To Diabetic Foot Care Among Diabetic PatientsDocument4 pagesKnowledge Related To Diabetes Mellitus and Self Care Practice Related To Diabetic Foot Care Among Diabetic PatientsEditor IJTSRDPas encore d'évaluation
- Concept of Shotha W.S.R To Arishta LakshanaDocument3 pagesConcept of Shotha W.S.R To Arishta LakshanaEditor IJTSRDPas encore d'évaluation
- Financial Risk, Capital Adequacy and Liquidity Performance of Deposit Money Banks in NigeriaDocument12 pagesFinancial Risk, Capital Adequacy and Liquidity Performance of Deposit Money Banks in NigeriaEditor IJTSRDPas encore d'évaluation
- A Study To Assess The Knowledge Regarding Iron Deficiency Anemia Among Reproductive Age Women in Selected Community ThrissurDocument4 pagesA Study To Assess The Knowledge Regarding Iron Deficiency Anemia Among Reproductive Age Women in Selected Community ThrissurEditor IJTSRDPas encore d'évaluation
- An Approach To The Diagnostic Study On Annavaha Srotodusti in Urdwaga Amlapitta WSR To Oesophagogastroduodenoscopic ChangesDocument4 pagesAn Approach To The Diagnostic Study On Annavaha Srotodusti in Urdwaga Amlapitta WSR To Oesophagogastroduodenoscopic ChangesEditor IJTSRDPas encore d'évaluation
- Importance of Controlled CreditDocument3 pagesImportance of Controlled CreditEditor IJTSRDPas encore d'évaluation
- HW1 - Problem 3.4.1: General ModelDocument6 pagesHW1 - Problem 3.4.1: General Model梁嫚芳Pas encore d'évaluation
- City University of Hong Kong Course Syllabus Offered by School of Law With Effect From Semester A 2021/ 2022Document6 pagesCity University of Hong Kong Course Syllabus Offered by School of Law With Effect From Semester A 2021/ 2022Lily ChanPas encore d'évaluation
- Questions About My PapersDocument2 pagesQuestions About My Papersapi-548918153Pas encore d'évaluation
- Conception of A Manual Brick Machine PDFDocument57 pagesConception of A Manual Brick Machine PDFamanuel admasuPas encore d'évaluation
- Ge 5 EthicsDocument59 pagesGe 5 EthicsWell WellPas encore d'évaluation
- PLC Mathematics Year 2Document5 pagesPLC Mathematics Year 2AndyKongPas encore d'évaluation
- Full Text Analysis of Power Flow of Nigerian 330kv Grid SystemDocument8 pagesFull Text Analysis of Power Flow of Nigerian 330kv Grid SystemOgunranti RasaqPas encore d'évaluation
- Digital Marketing Portfolio - Demiro Ragil SyahDocument18 pagesDigital Marketing Portfolio - Demiro Ragil Syahf8hkm8djnqPas encore d'évaluation
- Patient Satisfaction and Benefts of Music Therapy Services To Manage Stress and Pain in The Hospital Emergency DepartmentDocument25 pagesPatient Satisfaction and Benefts of Music Therapy Services To Manage Stress and Pain in The Hospital Emergency DepartmentBapak Sunaryo SPBU100% (1)
- Chapter 8 - MergedDocument61 pagesChapter 8 - MergedKyo learnPas encore d'évaluation
- Brandi Flowers Resumewithlogo1 Capstone 2014Document1 pageBrandi Flowers Resumewithlogo1 Capstone 2014api-267320777Pas encore d'évaluation
- Cognitive ObjectivesDocument9 pagesCognitive ObjectivesJennifer R. JuatcoPas encore d'évaluation
- Pulverized Anahaw Leaf Saribus Rotundifolius As A Main Component in Making Portland Pozzolana CementDocument40 pagesPulverized Anahaw Leaf Saribus Rotundifolius As A Main Component in Making Portland Pozzolana CementAnabellePas encore d'évaluation
- Educ 6 Prelim Module 1Document18 pagesEduc 6 Prelim Module 1Dexter Anthony AdialPas encore d'évaluation
- Methods of Research-Lession 4Document57 pagesMethods of Research-Lession 4Renj LoisePas encore d'évaluation
- DFS and BFS Search Algorithm ExplanedDocument6 pagesDFS and BFS Search Algorithm ExplanedDeepesh SahaPas encore d'évaluation
- Application of The BIM Method in Sustainable ConstructionDocument72 pagesApplication of The BIM Method in Sustainable ConstructionAnge Basile Diawara TshivumdaPas encore d'évaluation
- BAN203 S20 Course OutlineDocument6 pagesBAN203 S20 Course OutlineJiyong ZhangPas encore d'évaluation
- Research On Minimal-Pair DrillsDocument54 pagesResearch On Minimal-Pair DrillsYuri IssangPas encore d'évaluation
- Fakulti Pengurusan & Teknologi Maklumat Universiti Sultan Azlan ShahDocument4 pagesFakulti Pengurusan & Teknologi Maklumat Universiti Sultan Azlan ShahAlice ArputhamPas encore d'évaluation
- Creative Thinking Class 11 Psychology ProjectDocument7 pagesCreative Thinking Class 11 Psychology ProjectRiddhima MaheshwariPas encore d'évaluation
- 11th Second Term ResultDocument6 pages11th Second Term ResultRaghunandan RawatPas encore d'évaluation
- Applied Statistics HandbookDocument12 pagesApplied Statistics HandbookParameshPas encore d'évaluation
- DR Suresh Chandra CH - Google ScholarDocument2 pagesDR Suresh Chandra CH - Google Scholarsureshchandra8Pas encore d'évaluation
- ISEF GuidelinesDocument26 pagesISEF GuidelinesShinjiro OdaPas encore d'évaluation
- Creating Multimodal TextsDocument2 pagesCreating Multimodal TextsTee MendozaPas encore d'évaluation
- What Is A Null Hypothesis8Document6 pagesWhat Is A Null Hypothesis8a d100% (1)