Vous aimerez peut-être aussi
- Calibrate Your Airspeed IndicatorDocument2 pagesCalibrate Your Airspeed IndicatorReginaldoPas encore d'évaluation
- Niagara Data Recovery Service Guide: Technical DocumentDocument28 pagesNiagara Data Recovery Service Guide: Technical DocumentJazer Mike RamosPas encore d'évaluation
- Garmin GMA 350-350H Installation ManualDocument50 pagesGarmin GMA 350-350H Installation ManualDouglas LopesPas encore d'évaluation
- Marvella RO RDRO User ManualDocument17 pagesMarvella RO RDRO User ManualBenzeer BavaPas encore d'évaluation
- ICS PlusDocument12 pagesICS PlusbbilledeauxPas encore d'évaluation
- AC-23-8 ENSAIO EM VÔO Final-Part1Document174 pagesAC-23-8 ENSAIO EM VÔO Final-Part1Marcus DragoPas encore d'évaluation
- Robinson Series 22 - 44Document39 pagesRobinson Series 22 - 44Oscar Arias100% (1)
- RadioLink AT10II User ManualDocument84 pagesRadioLink AT10II User ManualMiguel Sanchez100% (1)
- Service Bulletin: TitleDocument12 pagesService Bulletin: TitleLuis EnriquePas encore d'évaluation
- Annex B. Pre-Flight Inspection R44Document23 pagesAnnex B. Pre-Flight Inspection R44Ann LechatPas encore d'évaluation
- PL515M4-HG102633v5 15iDocument235 pagesPL515M4-HG102633v5 15iHerry SusiloPas encore d'évaluation
- DBU-5000/5010E and PDL-5001: Business and Regional Systems Marketing BulletinDocument4 pagesDBU-5000/5010E and PDL-5001: Business and Regional Systems Marketing Bulletinlocoboeing100% (1)
- Cessna172RG Checklist Revised 11-6-12Document24 pagesCessna172RG Checklist Revised 11-6-12alphaPas encore d'évaluation
- Cirrus DFC 90 Autopilot Pilots GuideDocument71 pagesCirrus DFC 90 Autopilot Pilots GuideGeorge MeierPas encore d'évaluation
- Cirrus Sr22t MMDocument36 pagesCirrus Sr22t MMAL PANTOJAPas encore d'évaluation
- DC-3 Oral Exam GuideDocument107 pagesDC-3 Oral Exam GuideDonald Hill100% (1)
- Aircraft Tires and Tubes: NAVAIR 04-10-506Document70 pagesAircraft Tires and Tubes: NAVAIR 04-10-506adulfo03455Pas encore d'évaluation
- WX 10 Stormscope ManualDocument3 pagesWX 10 Stormscope Manualalex castro0% (1)
- Joint Aviation Requirements (JAR)Document8 pagesJoint Aviation Requirements (JAR)Kim BautistaPas encore d'évaluation
- VNC User GuideDocument194 pagesVNC User GuideVijayan.JPas encore d'évaluation
- 2007 04 19R1Document24 pages2007 04 19R1Yaşar AkyıldızPas encore d'évaluation
- Sandell 3308 HSIDocument101 pagesSandell 3308 HSISabby_89Pas encore d'évaluation
- 2009 Dassault Falcon 7X N207TR S/N35: Specification & SummaryDocument10 pages2009 Dassault Falcon 7X N207TR S/N35: Specification & Summarycjtrybiec100% (1)
- EPIRB Tester 5410 MKII HandbookDocument22 pagesEPIRB Tester 5410 MKII Handbookdashu3873Pas encore d'évaluation
- Instructions Continued AirworthinessDocument18 pagesInstructions Continued AirworthinessHugo GonzalezPas encore d'évaluation
- King KLN-90A Pilots ManualDocument173 pagesKing KLN-90A Pilots ManualFlyForFunPas encore d'évaluation
- Section - III Systems DescriptionDocument12 pagesSection - III Systems DescriptionJose LaraPas encore d'évaluation
- Pilatus-Pc7 ManualDocument19 pagesPilatus-Pc7 ManualRoderick Diaz MoraPas encore d'évaluation
- Safety Wire LockingDocument1 pageSafety Wire LockingUmeshdutt SridatPas encore d'évaluation
- RCA2600 User Manual Rev C PDFDocument9 pagesRCA2600 User Manual Rev C PDFMarcus DragoPas encore d'évaluation
- Autopilot KFC200Document5 pagesAutopilot KFC200JuanOñatePas encore d'évaluation
- CAP Regulation 100-1 - 08/21/2000Document16 pagesCAP Regulation 100-1 - 08/21/2000CAP History LibraryPas encore d'évaluation
- Type Certificate Data Sheet: No. EASA - IM.R.520Document8 pagesType Certificate Data Sheet: No. EASA - IM.R.520Oleksandr BalychevPas encore d'évaluation
- Makila - Sale Brochure PDFDocument2 pagesMakila - Sale Brochure PDFArisatya Patria TahtaPas encore d'évaluation
- ETP Premium Installation Instructions: MY P&WC POWER Offline Technical Publications (Single and Multi-User Modes)Document15 pagesETP Premium Installation Instructions: MY P&WC POWER Offline Technical Publications (Single and Multi-User Modes)Samirnov IcPas encore d'évaluation
- Hawker 00XPC-Water and WasteDocument8 pagesHawker 00XPC-Water and WasteJose LaraPas encore d'évaluation
- Marchetti SF 260Document23 pagesMarchetti SF 260Dexter McphersonPas encore d'évaluation
- 600 00174 000 R3 MLB700 Im PDFDocument67 pages600 00174 000 R3 MLB700 Im PDFzachPas encore d'évaluation
- gtx3x5 Installtoolguide 430 v2Document113 pagesgtx3x5 Installtoolguide 430 v201anku100% (1)
- PohDocument58 pagesPohHugo Miranda JúniorPas encore d'évaluation
- EC120 Transition Pilot - POIDocument7 pagesEC120 Transition Pilot - POI唐波Pas encore d'évaluation
- Phalcon 2000ex Operation Manual Iss 4eDocument84 pagesPhalcon 2000ex Operation Manual Iss 4eAnonymous UCveMQ100% (2)
- Brantly Helicopter ReportDocument4 pagesBrantly Helicopter Reportjorge paezPas encore d'évaluation
- G550 CVR Op TestDocument6 pagesG550 CVR Op TestAdrian Lau100% (1)
- Nelson Airport Operations and Regulatory Review Redacted - Redacted - RSDocument34 pagesNelson Airport Operations and Regulatory Review Redacted - Redacted - RSBillMetcalfePas encore d'évaluation
- BT139394EDocument23 pagesBT139394Ehin wongyai100% (1)
- BD-700 MMEL Ver9Document165 pagesBD-700 MMEL Ver9ShinYamaPas encore d'évaluation
- To 00-25-172 Ground Servicing of AircraftDocument100 pagesTo 00-25-172 Ground Servicing of AircraftFranciscoVicentePas encore d'évaluation
- m20s 1998Document364 pagesm20s 1998Tim MorganPas encore d'évaluation
- AS350 Spray Gear 210B - 2002Document1 pageAS350 Spray Gear 210B - 2002Russell GouldenPas encore d'évaluation
- BELL 429: One Aircraft. Endless PossibilitiesDocument2 pagesBELL 429: One Aircraft. Endless PossibilitiesJUAN CARLOS HENRIQUEZPas encore d'évaluation
- KLN 94 User GuideDocument284 pagesKLN 94 User GuideVinícius AndradePas encore d'évaluation
- WX RDR - MFDDocument21 pagesWX RDR - MFDa320Pas encore d'évaluation
- Form 145-01 - Application For Organization ApprovalDocument3 pagesForm 145-01 - Application For Organization ApprovalPutra LanangPas encore d'évaluation
- TCDS A18soDocument3 pagesTCDS A18soRaquel GomesPas encore d'évaluation
- Model A-30 Altitude Digitizer Operation Manual Installation ManualDocument6 pagesModel A-30 Altitude Digitizer Operation Manual Installation ManualHeringerPas encore d'évaluation
- 212 PTM01 IntroductionDocument4 pages212 PTM01 IntroductionMuktasid Sakib Rahman100% (1)
- Handling Qualities Largeaircrafts Cranfield PDFDocument289 pagesHandling Qualities Largeaircrafts Cranfield PDFsanjuPas encore d'évaluation
- Flightdynamics PDFDocument1 pageFlightdynamics PDFsanjuPas encore d'évaluation
- Flying Qualities For Piloted Airplane MIL PDFDocument40 pagesFlying Qualities For Piloted Airplane MIL PDFsanjuPas encore d'évaluation
- Flight Dynamics PDFDocument1 pageFlight Dynamics PDFsanjuPas encore d'évaluation
- Annexure ADocument2 pagesAnnexure ARajesh LingamalluPas encore d'évaluation
- Certificate For Medical Fitness PDFDocument1 pageCertificate For Medical Fitness PDFSwaroop VasistaPas encore d'évaluation
- Flight Validation of Downlinked Flight Management System 4D TrajectoryDocument10 pagesFlight Validation of Downlinked Flight Management System 4D TrajectorysanjuPas encore d'évaluation
- Engg Cutoff GenDocument33 pagesEngg Cutoff Genpratik039Pas encore d'évaluation
- Japanese Education SystemDocument2 pagesJapanese Education SystemRaana R. SherwaniPas encore d'évaluation
- An Exploration of The Role of The Anime and Mangas As Stimuli For Secondary Students Studying Japanese Payne, Howard, OginoDocument18 pagesAn Exploration of The Role of The Anime and Mangas As Stimuli For Secondary Students Studying Japanese Payne, Howard, OginoLuis Eduardo Ayala SanchezPas encore d'évaluation
- Political Science Assignment - 2 .... Foreign Policy of IndiaDocument11 pagesPolitical Science Assignment - 2 .... Foreign Policy of IndiaRoop Singh Meena75% (4)
- Workability Souv ProgDocument34 pagesWorkability Souv ProgCatherinePas encore d'évaluation
- The Acceptance and Modification of Foreign CuisineDocument7 pagesThe Acceptance and Modification of Foreign CuisineDenni ValentiniPas encore d'évaluation
- Bridging The Gaps New Views of Japanese Colonialism, 1931 To 1945Document14 pagesBridging The Gaps New Views of Japanese Colonialism, 1931 To 1945Nj942Pas encore d'évaluation
- Meiji Restoration Annotated BibliographyDocument9 pagesMeiji Restoration Annotated Bibliographyapi-342761692Pas encore d'évaluation
- JLPT N3 Grammar ListDocument1 pageJLPT N3 Grammar ListTasleem KhâñPas encore d'évaluation
- 新橋演舞場 Shimbashi Embujo Shichigatsu Dai Kabuki July 2011Document2 pages新橋演舞場 Shimbashi Embujo Shichigatsu Dai Kabuki July 2011trevorskinglePas encore d'évaluation
- O-MO-TE-NA-SHI English Book 2:: Japanese CultureDocument7 pagesO-MO-TE-NA-SHI English Book 2:: Japanese CultureDouble AZPas encore d'évaluation
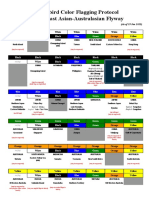
- Eaaf Shorebird Flag 2011Document3 pagesEaaf Shorebird Flag 2011nguoitinhmaquaiPas encore d'évaluation
- Fujita Seiko The Last Koga Ninja DownloadDocument3 pagesFujita Seiko The Last Koga Ninja DownloadSumit Verma0% (1)
- 初級1 How to Use This Textbook - 1Document13 pages初級1 How to Use This Textbook - 1Mab UngPas encore d'évaluation
- Kyoto Japan Visit ESL LessonDocument3 pagesKyoto Japan Visit ESL LessondeborahPas encore d'évaluation
- Japan Developed Atom Bomb The Atlanta Constitution - David SnellDocument5 pagesJapan Developed Atom Bomb The Atlanta Constitution - David Snellapi-245483329Pas encore d'évaluation
- Japan CPDocument124 pagesJapan CPJustin Melendres CajandingPas encore d'évaluation
- CSI 0141 - Operation Blacklist - Basic Outline Plan 01Document28 pagesCSI 0141 - Operation Blacklist - Basic Outline Plan 01DongelxPas encore d'évaluation
- Aishite ImasuDocument3 pagesAishite Imasuanon_769788318Pas encore d'évaluation
- Nissan Motor Company LTD - ICDocument12 pagesNissan Motor Company LTD - ICAsma AliPas encore d'évaluation
- Mariko Takeuchi, Photography in JapanDocument11 pagesMariko Takeuchi, Photography in JapanNicolás CancioPas encore d'évaluation
- Chapter 1 4Document31 pagesChapter 1 4rockabye babyPas encore d'évaluation
- PMB RevisionDocument16 pagesPMB RevisionSekolah Menengah Rimba100% (6)
- Contoh Jawapan Case StudyDocument3 pagesContoh Jawapan Case StudyDania JohanPas encore d'évaluation
- South Korea's Adultery LawDocument27 pagesSouth Korea's Adultery Lawwedcokenya100% (1)
- World Machine Tool Output 2012Document6 pagesWorld Machine Tool Output 2012Johan SneiderPas encore d'évaluation
- Chronicle Legion Volume 1Document270 pagesChronicle Legion Volume 1James SpencerPas encore d'évaluation
- EXPLORE DEEPER Sustainable Travel Experiences in JAPANDocument30 pagesEXPLORE DEEPER Sustainable Travel Experiences in JAPANMik RodPas encore d'évaluation
- IELT Sample Writing Task 1Document15 pagesIELT Sample Writing Task 1Silver DobellPas encore d'évaluation
- Global Flat Glass Industry 2010Document64 pagesGlobal Flat Glass Industry 2010murphy725Pas encore d'évaluation
- Black Dragon Society Kokuryukai PDFDocument4 pagesBlack Dragon Society Kokuryukai PDFjuan100% (2)