Vous aimerez peut-être aussi
- S 30FP SpecificationDocument22 pagesS 30FP SpecificationRubén Pérez Armas50% (2)
- A Guide to Electronic Maintenance and RepairsD'EverandA Guide to Electronic Maintenance and RepairsÉvaluation : 4.5 sur 5 étoiles4.5/5 (7)
- Standard Electrical SymbolsDocument40 pagesStandard Electrical Symbolssilviamenegazzo100% (13)
- KN 120-294 Service ManualDocument23 pagesKN 120-294 Service ManualAmir ChakaPas encore d'évaluation
- My Lab ReportDocument10 pagesMy Lab ReportAlfred AckonPas encore d'évaluation
- EL - 124 Electronic Devices & Circuits: Experiment # 06Document10 pagesEL - 124 Electronic Devices & Circuits: Experiment # 06Jawwad IqbalPas encore d'évaluation
- ECE 1 Experiment 7 ZENER DIODESDocument6 pagesECE 1 Experiment 7 ZENER DIODESNicole Soriano CalisinPas encore d'évaluation
- Test Device: Excitation CurveDocument2 pagesTest Device: Excitation CurveGANESH KPas encore d'évaluation
- Current TransformerDocument5 pagesCurrent TransformerPrateek SinghPas encore d'évaluation
- Pe ReportDocument13 pagesPe Reportfedley sikoliaPas encore d'évaluation
- Test Device: Excitation CurveDocument2 pagesTest Device: Excitation CurveGANESH KPas encore d'évaluation
- Test Device: ExcitationDocument2 pagesTest Device: Excitatione05139Pas encore d'évaluation
- Effect of DC Voltage On AC Magnetisation of Transformer Core SteelDocument2 pagesEffect of DC Voltage On AC Magnetisation of Transformer Core SteelNguyen Van Trong (EVPC)Pas encore d'évaluation
- Characterstics of Static Relay UndervoltageovervoltageDocument7 pagesCharacterstics of Static Relay Undervoltageovervoltagesaimanobhiram100% (2)
- PART B: Measure Voltage and Current in Circuit ObjectivesDocument3 pagesPART B: Measure Voltage and Current in Circuit ObjectivesYap Yu XuanPas encore d'évaluation
- Accuracy Class of Current TransformerDocument4 pagesAccuracy Class of Current TransformerSameera MadhushankaPas encore d'évaluation
- PN Junction Diode Characteristics and Rectifier CircuitsDocument12 pagesPN Junction Diode Characteristics and Rectifier CircuitsPANKAj Kr. [IIT KGP]Pas encore d'évaluation
- BXE Lab Manuals 3 To 11Document19 pagesBXE Lab Manuals 3 To 11amkslade101Pas encore d'évaluation
- Ecindu1l Exp3 RozDocument6 pagesEcindu1l Exp3 RozRoz BrianPas encore d'évaluation
- 371 Lab2Document13 pages371 Lab2Eugene ToPas encore d'évaluation
- CT ExplanationDocument9 pagesCT ExplanationAous HPas encore d'évaluation
- Current TransformerDocument9 pagesCurrent TransformerThang PhanPas encore d'évaluation
- Basic Electronics Half Wave Rectification LabDocument13 pagesBasic Electronics Half Wave Rectification LabPaa Kwesi ArhinfulPas encore d'évaluation
- Name: S Meyiwa STUDENT NUMBER: 21945099 Subject Name: Electronics 1 Report Title: Practical 1 ReportDocument4 pagesName: S Meyiwa STUDENT NUMBER: 21945099 Subject Name: Electronics 1 Report Title: Practical 1 Reportsiyabonga macyaPas encore d'évaluation
- 100 - Generator Stator Earth Fault ProtectionDocument10 pages100 - Generator Stator Earth Fault ProtectionPraneeth ReddyPas encore d'évaluation
- Lab 2 Power GenerationDocument7 pagesLab 2 Power GenerationKhawla AlameriPas encore d'évaluation
- WTG-25 L1Document41 pagesWTG-25 L1IvanPas encore d'évaluation
- Power-System Protection PDFDocument22 pagesPower-System Protection PDFSyafrizal SyafrizalPas encore d'évaluation
- EEE 111 lab manual 3 updated (1)Document5 pagesEEE 111 lab manual 3 updated (1)SHADOW manPas encore d'évaluation
- Zener DiodeDocument5 pagesZener DiodeMd. AbdullahPas encore d'évaluation
- Test Device: Excitation CurveDocument2 pagesTest Device: Excitation CurveNagaraj VjPas encore d'évaluation
- Electronics 1Document42 pagesElectronics 1Shanti Emmanuelle EscabartePas encore d'évaluation
- Variatore Di TensioneDocument12 pagesVariatore Di Tensioneconti51Pas encore d'évaluation
- LM10 Operational Amplifier and Voltage Reference: General DescriptionDocument19 pagesLM10 Operational Amplifier and Voltage Reference: General DescriptionMario SbampatoPas encore d'évaluation
- Ece Vii Power Electronics (10ec73) AssignmentDocument6 pagesEce Vii Power Electronics (10ec73) AssignmentThomas PricePas encore d'évaluation
- Ece-Vii-Power Electronics (10ec73) - Assignment PDFDocument6 pagesEce-Vii-Power Electronics (10ec73) - Assignment PDFAdarsh S Shettigar100% (1)
- Experiment - 1: Aim: Apparatus: Components: TheoryDocument8 pagesExperiment - 1: Aim: Apparatus: Components: TheoryDeepmalaPas encore d'évaluation
- Asmat Ullah (70069423) Experiment:5: Circuit DiagramDocument11 pagesAsmat Ullah (70069423) Experiment:5: Circuit DiagramAsmat NiaziPas encore d'évaluation
- Zener Diode Characteristics and ApplicationsDocument16 pagesZener Diode Characteristics and ApplicationsYoga DharshiniPas encore d'évaluation
- EC2700 LAB: Experiments Iii-VDocument12 pagesEC2700 LAB: Experiments Iii-VS GPas encore d'évaluation
- C5 PDFDocument5 pagesC5 PDFPrasadPurohitPas encore d'évaluation
- Test Device: Excitation CurveDocument2 pagesTest Device: Excitation Curveidhaya vickyPas encore d'évaluation
- Test Device: Excitation CurveDocument2 pagesTest Device: Excitation Curveidhaya vickyPas encore d'évaluation
- 3 - Zener Diod VI Characteristic.Document4 pages3 - Zener Diod VI Characteristic.BBA UniversityPas encore d'évaluation
- Description: Pin Arrangement TO-263Document6 pagesDescription: Pin Arrangement TO-263edgarlibanioPas encore d'évaluation
- Electromagnetic Fields Temperature: BurdenDocument2 pagesElectromagnetic Fields Temperature: BurdenBashaPas encore d'évaluation
- Diode Characteristics PDFDocument16 pagesDiode Characteristics PDFJOECELLE ABLEGINAPas encore d'évaluation
- Lab ReportDocument5 pagesLab Reportmoslahuddin2022Pas encore d'évaluation
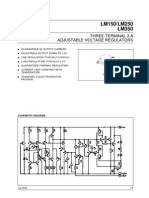
- LM150/LM250 LM350: Three-Terminal 3 A Adjustable Voltage RegulatorsDocument10 pagesLM150/LM250 LM350: Three-Terminal 3 A Adjustable Voltage RegulatorsChandan Suryakant SinghPas encore d'évaluation
- Laboratory 2 - Diode Characteristics - Don Bernard D. MijaresDocument14 pagesLaboratory 2 - Diode Characteristics - Don Bernard D. MijaresDon Bernard MijaresPas encore d'évaluation
- Cag 1737Document5 pagesCag 1737Anonymous HuHbq4OR100% (2)
- Voltage Regulation OF Hydro Generator: Presented byDocument22 pagesVoltage Regulation OF Hydro Generator: Presented bySanjay Agrawal100% (1)
- Zener Diode Voltage RegulationDocument5 pagesZener Diode Voltage RegulationJoshua DsouzaPas encore d'évaluation
- Cag 1737Document5 pagesCag 1737AONLAPas encore d'évaluation
- Characteristics of Static RelayDocument7 pagesCharacteristics of Static RelayNandini JayakumarPas encore d'évaluation
- Qatar University Physics Lab Report on Transformer EfficiencyDocument7 pagesQatar University Physics Lab Report on Transformer EfficiencyyousefPas encore d'évaluation
- LM1117Document12 pagesLM1117George ArambuloPas encore d'évaluation
- Microwave Oven Inverter HV Power Supply PDFDocument8 pagesMicrowave Oven Inverter HV Power Supply PDFScotty MacPas encore d'évaluation
- Lab Report On BJT Common Emitter CharacteristicsDocument5 pagesLab Report On BJT Common Emitter CharacteristicsMd. AbdullahPas encore d'évaluation
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1D'EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Évaluation : 2.5 sur 5 étoiles2.5/5 (3)
- Technical Particulars-2500aDocument1 pageTechnical Particulars-2500aalageshvijayPas encore d'évaluation
- Ups Ground SystemDocument3 pagesUps Ground SystemalageshvijayPas encore d'évaluation
- Why To Use Class X CTDocument2 pagesWhy To Use Class X CTtwinvbooks100% (1)
- Quick Busbar SelectorDocument3 pagesQuick Busbar SelectoralageshvijayPas encore d'évaluation
- Comparison Between Vacuum & SF6 Circuit Breaker For Medium Voltage ApplicationDocument12 pagesComparison Between Vacuum & SF6 Circuit Breaker For Medium Voltage ApplicationcheedingPas encore d'évaluation
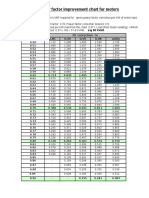
- Power Factor Improvement Chart For Motors: ExampleDocument1 pagePower Factor Improvement Chart For Motors: Examplealageshvijay100% (1)
- Selection of Fuse For TransformersDocument2 pagesSelection of Fuse For TransformersalageshvijayPas encore d'évaluation
- Ups Ground SystemDocument3 pagesUps Ground SystemalageshvijayPas encore d'évaluation
- Sizing of Cable For Motor FeedersDocument1 pageSizing of Cable For Motor FeedersalageshvijayPas encore d'évaluation
- Fault Level ImportanceDocument1 pageFault Level ImportancealageshvijayPas encore d'évaluation
- OHM'S LAW AND MOTOR FORMULASDocument6 pagesOHM'S LAW AND MOTOR FORMULASalageshvijayPas encore d'évaluation
- Why To Use Class X CTDocument2 pagesWhy To Use Class X CTtwinvbooks100% (1)
- Sizing of Cable For Motor FeedersDocument1 pageSizing of Cable For Motor FeedersalageshvijayPas encore d'évaluation
- Disconnector Type TestingDocument6 pagesDisconnector Type TestingalageshvijayPas encore d'évaluation
- Calculation of Current Carrying Capacity of Aluminum BusbarDocument1 pageCalculation of Current Carrying Capacity of Aluminum BusbaralageshvijayPas encore d'évaluation
- Calculation of Current Carrying Capacity of Aluminum BusbarDocument1 pageCalculation of Current Carrying Capacity of Aluminum BusbaralageshvijayPas encore d'évaluation
- ANSI CodesDocument3 pagesANSI CodesalageshvijayPas encore d'évaluation
- Fault Level ImportanceDocument1 pageFault Level ImportancealageshvijayPas encore d'évaluation
- Calculation of Current Carrying Capacity of Aluminum BusbarDocument1 pageCalculation of Current Carrying Capacity of Aluminum BusbaralageshvijayPas encore d'évaluation
- Calculation of Current Carrying Capacity of Aluminum BusbarDocument1 pageCalculation of Current Carrying Capacity of Aluminum BusbaralageshvijayPas encore d'évaluation
- Busbar SizeDocument1 pageBusbar SizealageshvijayPas encore d'évaluation
- Physics - Concepts - Velocity and AccelerationDocument2 pagesPhysics - Concepts - Velocity and AccelerationalageshvijayPas encore d'évaluation
- We Know That Reactive Loads Such As Inductors and Capacitors Dissipate Zero PowerDocument11 pagesWe Know That Reactive Loads Such As Inductors and Capacitors Dissipate Zero PoweralageshvijayPas encore d'évaluation
- Fault Level ImportanceDocument1 pageFault Level ImportancealageshvijayPas encore d'évaluation
- Selection of Fuse For TransformersDocument2 pagesSelection of Fuse For TransformersalageshvijayPas encore d'évaluation
- Calculation - Capacitor For PF ImprovementDocument2 pagesCalculation - Capacitor For PF ImprovementalageshvijayPas encore d'évaluation
- Component Name, Make& Catalogue DetailsDocument3 pagesComponent Name, Make& Catalogue DetailsalageshvijayPas encore d'évaluation
- Power Factor Improvement Chart For Motors: ExampleDocument1 pagePower Factor Improvement Chart For Motors: Examplealageshvijay100% (1)
- Materials ScienceDocument17 pagesMaterials ScienceJeromeDelCastilloPas encore d'évaluation
- DK112 DKDocument10 pagesDK112 DKSMAN 8 Palangka RayaPas encore d'évaluation
- NEUROPHYSIOLOGYDocument224 pagesNEUROPHYSIOLOGYKheliwi100% (2)
- MIN 2500-6000TL-XE User ManualDocument27 pagesMIN 2500-6000TL-XE User ManualAlumeia Energia Solar e Serviços TécnicosPas encore d'évaluation
- ECE 5664 Spring 2021 Test #1Document7 pagesECE 5664 Spring 2021 Test #1Muhammad FarooqPas encore d'évaluation
- Dielectric Analysis of Power Transformers ENUDocument21 pagesDielectric Analysis of Power Transformers ENUJose Antonio Huamani Chuquirimay100% (1)
- 51W 10540 1Document16 pages51W 10540 1Mitrofan AnduPas encore d'évaluation
- Lab Session: 4: Demonstrate The Behavior of A Silicon Diode in Full Wave RectifierDocument10 pagesLab Session: 4: Demonstrate The Behavior of A Silicon Diode in Full Wave RectifierFatima AmjadPas encore d'évaluation
- 1A Low Dropout Voltage Regulator DatasheetDocument8 pages1A Low Dropout Voltage Regulator DatasheetMauricio Raul RotmanPas encore d'évaluation
- Single LNB Supply and Control Voltage Regulator: Features and Benefits DescriptionDocument21 pagesSingle LNB Supply and Control Voltage Regulator: Features and Benefits DescriptionReceptores ServesPas encore d'évaluation
- The E-Stress GeneratorDocument12 pagesThe E-Stress GeneratorMikkel RevesenPas encore d'évaluation
- 6055-31 VR Breaker 1200-2000A - May 2008 PDFDocument42 pages6055-31 VR Breaker 1200-2000A - May 2008 PDFRahil TasawarPas encore d'évaluation
- VDF - Svx030a1-4a1b2 - UmDocument156 pagesVDF - Svx030a1-4a1b2 - UmRicardoPas encore d'évaluation
- Magnetic Resonant AmplifierDocument31 pagesMagnetic Resonant Amplifierlittledigger100% (7)
- 1-1cvjgdf Ys840di Errorcode of Alarm 380500-DeuDocument14 pages1-1cvjgdf Ys840di Errorcode of Alarm 380500-DeuNazar AbbasPas encore d'évaluation
- Mil STD 750eDocument685 pagesMil STD 750eTalmon FirestonePas encore d'évaluation
- Physics - JEE Main 2021 July Chapter-Wise - MathonGoDocument203 pagesPhysics - JEE Main 2021 July Chapter-Wise - MathonGoRashmita JenaPas encore d'évaluation
- Printed Circuit Board Layout For Switched-Mode Power SupplyDocument37 pagesPrinted Circuit Board Layout For Switched-Mode Power SupplyThien DinhPas encore d'évaluation
- Av02 2516enDocument13 pagesAv02 2516enpagol_23_smhPas encore d'évaluation
- Reduced graphene oxide-cellulose films for flexible temperature sensorsDocument8 pagesReduced graphene oxide-cellulose films for flexible temperature sensorsMicu CristiPas encore d'évaluation
- Electrical CapacitorsDocument20 pagesElectrical CapacitorsVinayKumarPas encore d'évaluation
- Custom Duty-Chapter 85Document25 pagesCustom Duty-Chapter 85JN ChoudhuriPas encore d'évaluation
- Piezoelectric Transformers For Ultra-Low Voltage Energy Harvesting ApplicationsDocument4 pagesPiezoelectric Transformers For Ultra-Low Voltage Energy Harvesting ApplicationsArroofi MaulanaPas encore d'évaluation
- Chapter 2 Transmission Lines New1Document52 pagesChapter 2 Transmission Lines New1abdul hadi ps100% (1)
- LG Lb22e 32lm6200-Ta (SM) PDFDocument79 pagesLG Lb22e 32lm6200-Ta (SM) PDFshamsudin yassinPas encore d'évaluation
- Electronic Transistor Ignition For Cars Kit Manual PDFDocument12 pagesElectronic Transistor Ignition For Cars Kit Manual PDFRaúl MartínPas encore d'évaluation
- Physics Electrostatics MCQDocument8 pagesPhysics Electrostatics MCQdheeraj ShahPas encore d'évaluation
- Igbt Spice ModelingDocument43 pagesIgbt Spice ModelingBrian WillardPas encore d'évaluation
- Criterions For Selection of Volume Induction Heating ParametersDocument23 pagesCriterions For Selection of Volume Induction Heating ParametersVidhuPandeyPas encore d'évaluation