Vous aimerez peut-être aussi
- Large Step Ratio DC-DC Converter Using Input-Series-Output-Parallel ConfigurationDocument12 pagesLarge Step Ratio DC-DC Converter Using Input-Series-Output-Parallel ConfigurationArunavaPas encore d'évaluation
- Analysis of Harmonics and Resonances in HVDC MMC Link Connected To AC GridDocument6 pagesAnalysis of Harmonics and Resonances in HVDC MMC Link Connected To AC Grideeng8124Pas encore d'évaluation
- HVDC VSC 2L BenchmarkDocument7 pagesHVDC VSC 2L BenchmarkRavi VermaPas encore d'évaluation
- Closed Sepic1Document6 pagesClosed Sepic1Thimothy BasavaPas encore d'évaluation
- Hybrid NPC CHBDocument10 pagesHybrid NPC CHBvahid barahoueiPas encore d'évaluation
- MATLAB Co-Simulation Tools For Power Supply Systems Design: V. Boscaino, G. CapponiDocument4 pagesMATLAB Co-Simulation Tools For Power Supply Systems Design: V. Boscaino, G. CapponivboscainoPas encore d'évaluation
- Comparison of Total Harmonic Distortion of ModularDocument5 pagesComparison of Total Harmonic Distortion of ModularRodovarPas encore d'évaluation
- Analysis and Design of DC-DC/AC Non Isolated Cuk Converter Using Sliding Mode ControllerDocument8 pagesAnalysis and Design of DC-DC/AC Non Isolated Cuk Converter Using Sliding Mode ControllerHitakshi GuptaPas encore d'évaluation
- IET Generation Trans Dist - 2022 - Tayyab - Active and Reactive Power Control of Grid Connected Single Phase AsymmetricalDocument13 pagesIET Generation Trans Dist - 2022 - Tayyab - Active and Reactive Power Control of Grid Connected Single Phase AsymmetricalFARHAD ILAHI BakhshPas encore d'évaluation
- A Matlahsimulink Tool For Power Converters Teaching A Power FacDocument5 pagesA Matlahsimulink Tool For Power Converters Teaching A Power FacRAJAN M SPas encore d'évaluation
- CH-43 Electric TractionDocument75 pagesCH-43 Electric TractionPunitPas encore d'évaluation
- MMC Avg DetailDocument8 pagesMMC Avg Detailashuchary54Pas encore d'évaluation
- The Modular Multilevel Converter For High Step-Up Ratio DC-DC ConversionDocument12 pagesThe Modular Multilevel Converter For High Step-Up Ratio DC-DC ConversionBHARADWAJ CHIVUKULAPas encore d'évaluation
- (1 - CV) Model Predictive Control Method For Modular Multilevel Converter ApplicationsDocument7 pages(1 - CV) Model Predictive Control Method For Modular Multilevel Converter ApplicationsNam Hoang ThanhPas encore d'évaluation
- Ultra-Low Power Solar Energy Harvester For Iot Edge Node DevicesDocument4 pagesUltra-Low Power Solar Energy Harvester For Iot Edge Node DevicesCristina GallardoPas encore d'évaluation
- Novel Asymmetrical Multilevel Inverter Topology With Reduced Number of Switches For Photovoltaic ApplicationsDocument6 pagesNovel Asymmetrical Multilevel Inverter Topology With Reduced Number of Switches For Photovoltaic ApplicationsKRISHNA PRASADPas encore d'évaluation
- Development of A MATLAB & Simulink Model of A Single-Phase Grid-Connected Photovoltaic System PDFDocument8 pagesDevelopment of A MATLAB & Simulink Model of A Single-Phase Grid-Connected Photovoltaic System PDFAshwani GargPas encore d'évaluation
- Development of A MATLAB/Simulink Model of A Single-Phase Grid-Connected Photovoltaic SystemDocument8 pagesDevelopment of A MATLAB/Simulink Model of A Single-Phase Grid-Connected Photovoltaic SystemhmitlarPas encore d'évaluation
- 127 Multilevel Inverter: International Research Journal of Engineering and Technology (IRJET)Document10 pages127 Multilevel Inverter: International Research Journal of Engineering and Technology (IRJET)Sohib LoudadjiPas encore d'évaluation
- 2008 Predictive Control Algorithm Technique For Multilevel Cascade InverterDocument9 pages2008 Predictive Control Algorithm Technique For Multilevel Cascade Inverterdaiduongxanh14113Pas encore d'évaluation
- Model Predictive Control For Single-Phase Switched-Capacitor Multilevel InvertersDocument16 pagesModel Predictive Control For Single-Phase Switched-Capacitor Multilevel InvertersRodovarPas encore d'évaluation
- Single-Inductor Multiple-Output Switching Converters With Time-Multiplexing Control in Discontinuous Conduction ModeDocument12 pagesSingle-Inductor Multiple-Output Switching Converters With Time-Multiplexing Control in Discontinuous Conduction ModeZhongpeng LiangPas encore d'évaluation
- ARTICLE Onduleurs MultiniveauxDocument14 pagesARTICLE Onduleurs MultiniveauxKhalid SalmiPas encore d'évaluation
- Comparative study of MLI and dual inverter using SVM techniquesDocument8 pagesComparative study of MLI and dual inverter using SVM techniquesshiva256Pas encore d'évaluation
- Barros, 2008 PDFDocument12 pagesBarros, 2008 PDFEdsonPas encore d'évaluation
- Energy Balancing Improvement of Modular Multilevel Converters Under Unbalanced Grid ConditionsDocument10 pagesEnergy Balancing Improvement of Modular Multilevel Converters Under Unbalanced Grid ConditionsXiaoxiao LiuPas encore d'évaluation
- 2014 APEC Thermal Analysis of A SubmodulDocument7 pages2014 APEC Thermal Analysis of A SubmodulNAM PHẠM LÊPas encore d'évaluation
- Lecture 24 Computer Modeling and Simulation of PWM Converter CircuitsDocument6 pagesLecture 24 Computer Modeling and Simulation of PWM Converter Circuitslenovo1986Pas encore d'évaluation
- 2021 Chilecon Pinv15-584Document5 pages2021 Chilecon Pinv15-584EdgarPas encore d'évaluation
- State-space model of grid-connected inverters under current controlDocument10 pagesState-space model of grid-connected inverters under current controloussama sadkiPas encore d'évaluation
- Buck Boost Converter Small Signal Model Dynamic Analysis Under System Uncertainties PDFDocument13 pagesBuck Boost Converter Small Signal Model Dynamic Analysis Under System Uncertainties PDFTariq KhanPas encore d'évaluation
- Hydro Quebec Large-Scale Real-Time Simulation FINALDocument8 pagesHydro Quebec Large-Scale Real-Time Simulation FINALOsman Berat ÇelebiPas encore d'évaluation
- Power Converters, Control, and Energy Management For Distributed GenerationDocument5 pagesPower Converters, Control, and Energy Management For Distributed GenerationAbdelaziz IsmealPas encore d'évaluation
- Offshore Wind Farm Modeling Accuracy and Efficiency in MMC-Based Multiterminal HVDC ConnectionDocument11 pagesOffshore Wind Farm Modeling Accuracy and Efficiency in MMC-Based Multiterminal HVDC Connectionengr.jahangeersoomroPas encore d'évaluation
- A Novel Bidirectional T-Type Multilevel Inverter For Electric Vehicle ApplicationsDocument11 pagesA Novel Bidirectional T-Type Multilevel Inverter For Electric Vehicle Applicationsfarid kerrouchePas encore d'évaluation
- DC-DC CONVERTER MODELINGDocument13 pagesDC-DC CONVERTER MODELINGJuned Azlaan ShaikhPas encore d'évaluation
- Modular Multilevel ConverterDocument11 pagesModular Multilevel Converterchientdh2Pas encore d'évaluation
- A New High Step-Up MIMO DC-DC ConverterDocument10 pagesA New High Step-Up MIMO DC-DC Convertermanohari kollapuPas encore d'évaluation
- 1.cascaded Two-Level Inverter-Based Multilevel STATCOM For High-Power ApplicationsDocument9 pages1.cascaded Two-Level Inverter-Based Multilevel STATCOM For High-Power ApplicationsSivareddy MudiyalaPas encore d'évaluation
- An Experimental Prototype of Buck Converter Fed Series DC Motor Implementing Speed and Current ControlsDocument4 pagesAn Experimental Prototype of Buck Converter Fed Series DC Motor Implementing Speed and Current ControlsdevchandarPas encore d'évaluation
- Zaratushtra, 816-FinalDocument9 pagesZaratushtra, 816-FinalCao Đức HuyPas encore d'évaluation
- pq2014 Submission 901Document6 pagespq2014 Submission 901SFGRISELDA SANCHEZPas encore d'évaluation
- Cascaded MLI With Reduced ElementsDocument10 pagesCascaded MLI With Reduced ElementsGp NAYAGRAH ELECTRICALPas encore d'évaluation
- Simplified Approach For Acquisition of Submodule Capacitor Voltages of The Modular Multilevel Converter Using Low SampDocument11 pagesSimplified Approach For Acquisition of Submodule Capacitor Voltages of The Modular Multilevel Converter Using Low SampsukanyaPas encore d'évaluation
- A Novel Ultrafast Transient Constant on-Time Buck Converter for Multiphase OperationDocument11 pagesA Novel Ultrafast Transient Constant on-Time Buck Converter for Multiphase OperationzzhbpainPas encore d'évaluation
- Analysis and Simulation of A Multiple Input Interleaved Boost Converter For Renewable Energy ApplicationsDocument7 pagesAnalysis and Simulation of A Multiple Input Interleaved Boost Converter For Renewable Energy ApplicationsChandra Sekhar Reddy GadePas encore d'évaluation
- Control Sysytems by SuklaDocument51 pagesControl Sysytems by Suklavinay kumar MPas encore d'évaluation
- Development of A MATLABSimulink Model of A Single-Phase Grid-Connected Photovoltaic System-IwQDocument8 pagesDevelopment of A MATLABSimulink Model of A Single-Phase Grid-Connected Photovoltaic System-IwQSaddam HussainPas encore d'évaluation
- Design of Microcontroller Based Multilevel InverterDocument4 pagesDesign of Microcontroller Based Multilevel InverterInternational Organization of Scientific Research (IOSR)Pas encore d'évaluation
- Multilevel Converters: Control and Modulation Techniques For Their Operation and Industrial ApplicationsDocument16 pagesMultilevel Converters: Control and Modulation Techniques For Their Operation and Industrial ApplicationsGanesh PradhanPas encore d'évaluation
- 3 Multilevel Converter-4Document20 pages3 Multilevel Converter-4Praveen GsPas encore d'évaluation
- Small-Signal Modeling of Digitally Controlled Grid-Connected Inverters With FiltersDocument14 pagesSmall-Signal Modeling of Digitally Controlled Grid-Connected Inverters With FiltersTravis GrayPas encore d'évaluation
- InvertersDocument8 pagesInvertersJeffrey A PobladorPas encore d'évaluation
- Dual-Input LLCDocument11 pagesDual-Input LLCVishal PusadkarPas encore d'évaluation
- PV InverterDocument16 pagesPV Inverterramalingam sPas encore d'évaluation
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlD'EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlÉvaluation : 5 sur 5 étoiles5/5 (1)
- Simulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorD'EverandSimulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorPas encore d'évaluation
- Power Systems-On-Chip: Practical Aspects of DesignD'EverandPower Systems-On-Chip: Practical Aspects of DesignBruno AllardPas encore d'évaluation
- Optimized Hybrid Phase Disposition PWM Control Method For Multilevel InverterDocument5 pagesOptimized Hybrid Phase Disposition PWM Control Method For Multilevel Inverterதமிழன்Pas encore d'évaluation
- p347 PDFDocument16 pagesp347 PDFதமிழன்Pas encore d'évaluation
- Ee2403 Sem 2 MarksDocument15 pagesEe2403 Sem 2 MarksBala SubramanianPas encore d'évaluation
- Different Power Supplies For Different Machines: H.-J. EckoldtDocument20 pagesDifferent Power Supplies For Different Machines: H.-J. Eckoldtதமிழன்Pas encore d'évaluation
- Wegecm 02Document10 pagesWegecm 02Shihab MonPas encore d'évaluation
- Hybrid GridDocument11 pagesHybrid Gridதமிழன்Pas encore d'évaluation
- Special Electrical Machines PDFDocument151 pagesSpecial Electrical Machines PDFlaxmandasriPas encore d'évaluation
- PSPWMDocument29 pagesPSPWMSrinivas SirimullaPas encore d'évaluation
- ADCs and DACs Review: Performance and TechniquesDocument15 pagesADCs and DACs Review: Performance and Techniquesதமிழன்Pas encore d'évaluation
- Hagiwara2009 PDFDocument10 pagesHagiwara2009 PDFதமிழன்Pas encore d'évaluation
- IIT Hyderabad PhD Admissions Sample Question PaperDocument2 pagesIIT Hyderabad PhD Admissions Sample Question PaperabPas encore d'évaluation
- Steuer 2016Document10 pagesSteuer 2016தமிழன்Pas encore d'évaluation
- p185 PDFDocument24 pagesp185 PDFதமிழன்Pas encore d'évaluation
- A Study of 4D Printing andDocument13 pagesA Study of 4D Printing andதமிழன்Pas encore d'évaluation
- Current Status of 4D Printing Technology and TheDocument15 pagesCurrent Status of 4D Printing Technology and Theதமிழன்Pas encore d'évaluation
- CE6451Document6 pagesCE6451தமிழன்Pas encore d'évaluation
- Wind-Driven Pyroelectric Energy Harvesting DeviceDocument9 pagesWind-Driven Pyroelectric Energy Harvesting Deviceதமிழன்Pas encore d'évaluation
- XRDDocument19 pagesXRDதமிழன்Pas encore d'évaluation
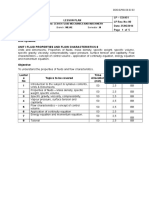
- Fluid Mechanics Lesson PlanDocument6 pagesFluid Mechanics Lesson Planதமிழன்Pas encore d'évaluation
- Metrology SlidesDocument39 pagesMetrology Slidesதமிழன்Pas encore d'évaluation
- Selecting and Constructing Data Collection Instruments: IpdetDocument59 pagesSelecting and Constructing Data Collection Instruments: Ipdetதமிழன்Pas encore d'évaluation
- Research ReportDocument2 pagesResearch ReportadipjksPas encore d'évaluation
- MPP-Handout (Python)Document71 pagesMPP-Handout (Python)Sai shravya GorekarPas encore d'évaluation
- Lecture 1 Introduction NISDocument44 pagesLecture 1 Introduction NISAreefPas encore d'évaluation
- Excel Template Saves Time Configuring RedPrairie WMS ReplenishmentsDocument9 pagesExcel Template Saves Time Configuring RedPrairie WMS ReplenishmentsChristian RNPas encore d'évaluation
- Fnde 103Document1 pageFnde 103hemacrcPas encore d'évaluation
- Create A Multiple Partition, Multi-Boot USB Flash Drive Under Windows - RMPrepUSBDocument6 pagesCreate A Multiple Partition, Multi-Boot USB Flash Drive Under Windows - RMPrepUSBदिब्यम प्रभात्Pas encore d'évaluation
- IoT Report on UART CommunicationDocument30 pagesIoT Report on UART CommunicationLOHITHKUMAR GOPas encore d'évaluation
- Procedure Integrate IB9387-LPR With VAST2Document11 pagesProcedure Integrate IB9387-LPR With VAST2Silvio FidelisPas encore d'évaluation
- SQLDocument7 pagesSQLGerman MedinaPas encore d'évaluation
- BI Apps 11.1.1.8.1 Configuration GuideDocument476 pagesBI Apps 11.1.1.8.1 Configuration Guidemsujankumar100% (1)
- CATVISION STB CSR 401HP User Manual With WifiDocument21 pagesCATVISION STB CSR 401HP User Manual With WifiSajalPas encore d'évaluation
- W7A1Document5 pagesW7A1Ayush mondalPas encore d'évaluation
- CRMM Bupa MapDocument2 pagesCRMM Bupa MaprafdrePas encore d'évaluation
- CryptoKit Developers GuideDocument377 pagesCryptoKit Developers GuideharneuPas encore d'évaluation
- Odoo DevelopmentDocument189 pagesOdoo DevelopmentOperational KafilahPas encore d'évaluation
- How To Place An SE78 Image On An Adobe Form - SAP BlogsDocument12 pagesHow To Place An SE78 Image On An Adobe Form - SAP BlogsMarius UrsachePas encore d'évaluation
- OfflineOrderNumber Tool Ver15 50d 758059ENmDocument77 pagesOfflineOrderNumber Tool Ver15 50d 758059ENmEmir Kamberović100% (1)
- Curriculum Vitae Ramya-1Document4 pagesCurriculum Vitae Ramya-1meghaPas encore d'évaluation
- C++ Intro Chapter 1: Learn Programming FundamentalsDocument37 pagesC++ Intro Chapter 1: Learn Programming FundamentalsdzikrydsPas encore d'évaluation
- TROUBLESHOOTINGDocument51 pagesTROUBLESHOOTINGDan PopaPas encore d'évaluation
- XenServer 6.5.0 Configuration LimitsDocument4 pagesXenServer 6.5.0 Configuration LimitsCaballero1890Pas encore d'évaluation
- Mindjet Large Scale Deployment GuideDocument59 pagesMindjet Large Scale Deployment GuideJenderalKancilPas encore d'évaluation
- Master Thesis DDoS Attack Detection in SDN Based VANET Architectures Group 1097Document175 pagesMaster Thesis DDoS Attack Detection in SDN Based VANET Architectures Group 1097jefersonmartinez100% (1)
- TS 29329-920 SHDocument21 pagesTS 29329-920 SHRonald PomaresPas encore d'évaluation
- Computer SC Class 5 Software EXERCISE (PG 18) : Worksheet 1Document2 pagesComputer SC Class 5 Software EXERCISE (PG 18) : Worksheet 1Naitik SinghPas encore d'évaluation
- Machine Learning: Andrew NG's Course From Coursera: PresentationDocument4 pagesMachine Learning: Andrew NG's Course From Coursera: PresentationDo Thu ThuyPas encore d'évaluation
- Copeland® Performancealert™ Integration With E2 RX Refrigeration ControllersDocument36 pagesCopeland® Performancealert™ Integration With E2 RX Refrigeration ControllersdinoestarkxdPas encore d'évaluation
- Resume 8Document1 pageResume 8Shashank SauravPas encore d'évaluation
- Smart Energy Product Portfolio August23Document96 pagesSmart Energy Product Portfolio August23Achraf ElectricPas encore d'évaluation
- Preload InstallerDocument2 pagesPreload InstallerAlex SanchezPas encore d'évaluation
- E-Commerce Lab: Trinity Institute of Professional StudiesDocument45 pagesE-Commerce Lab: Trinity Institute of Professional StudiesPulkit AggarwalPas encore d'évaluation