Vous aimerez peut-être aussi
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (587)
- Basic Electronic & Transistor Circuits PDFDocument54 pagesBasic Electronic & Transistor Circuits PDFSandeep GoyalPas encore d'évaluation
- 4GDocument6 pages4GAnonymous 124Y7m6pPas encore d'évaluation
- QXDM Installation UsageDocument17 pagesQXDM Installation UsageGokulraj PandiyanPas encore d'évaluation
- Presentation On Digital Storage OscilloscopeDocument17 pagesPresentation On Digital Storage OscilloscopeGokulraj PandiyanPas encore d'évaluation
- RF Channel Characterization For 4G MIMO Deployments Rev9Document46 pagesRF Channel Characterization For 4G MIMO Deployments Rev9sugadoorPas encore d'évaluation
- Beam Division Multiple Access For 5gDocument3 pagesBeam Division Multiple Access For 5gPrasad KalePas encore d'évaluation
- 5G EraDocument42 pages5G ErarohitkamahiPas encore d'évaluation
- Adaptive Filter For Echo CancellationDocument5 pagesAdaptive Filter For Echo CancellationAnonymous GTcxTGPas encore d'évaluation
- 2009-12-10 LTESecurityTutorial PDFDocument55 pages2009-12-10 LTESecurityTutorial PDFGokulraj PandiyanPas encore d'évaluation
- IMD Measurements Using IMDView AnDocument20 pagesIMD Measurements Using IMDView AnGokulraj PandiyanPas encore d'évaluation
- Open-Prototyping 5G CourseDocument6 pagesOpen-Prototyping 5G CourseGokulraj PandiyanPas encore d'évaluation
- TAP Mimo ReviewDocument15 pagesTAP Mimo ReviewMarwan HammoudaPas encore d'évaluation
- Abstract On 5gDocument7 pagesAbstract On 5gGaurav Mishra100% (2)
- Comparison of Mobile TechnologiesDocument8 pagesComparison of Mobile TechnologiesAbid Jan100% (1)
- LTE FDD Vs LTE TDD From A Qos Perspective PDFDocument5 pagesLTE FDD Vs LTE TDD From A Qos Perspective PDFGokulraj PandiyanPas encore d'évaluation
- Advanced 3G 4G Wireless Communication StandardsDocument22 pagesAdvanced 3G 4G Wireless Communication StandardsNaresh BirudalaPas encore d'évaluation
- Wireless Communication Over Wideband Channels Chuster PDFDocument386 pagesWireless Communication Over Wideband Channels Chuster PDFGokulraj PandiyanPas encore d'évaluation
- Capacity and Coverage Analysis of Rural Multihop 802.11nDocument6 pagesCapacity and Coverage Analysis of Rural Multihop 802.11nGokulraj PandiyanPas encore d'évaluation
- SSL & TLS EssentialsDocument212 pagesSSL & TLS EssentialsjuanprestiaPas encore d'évaluation
- OPTICOM PEVQ Analyzer DataSheet 08-02-01Document8 pagesOPTICOM PEVQ Analyzer DataSheet 08-02-01Gokulraj PandiyanPas encore d'évaluation
- Wireless SecurityDocument43 pagesWireless SecurityGokulraj PandiyanPas encore d'évaluation
- Digital Wireless BasicsDocument376 pagesDigital Wireless BasicsGokulraj PandiyanPas encore d'évaluation
- Testing Mpeg Iptv Vod QoeDocument17 pagesTesting Mpeg Iptv Vod QoeMitesh VardhanPas encore d'évaluation
- SpecSheet PEVQ 08-03-13 PDFDocument2 pagesSpecSheet PEVQ 08-03-13 PDFGokulraj PandiyanPas encore d'évaluation
- Pevqs WP Nab BecDocument9 pagesPevqs WP Nab BecGokulraj PandiyanPas encore d'évaluation
- Pevq SDocument8 pagesPevq SGokulraj PandiyanPas encore d'évaluation
- PEVQDocument5 pagesPEVQGokulraj PandiyanPas encore d'évaluation
- Coverage and Capacity Optimization of Self Managed Wireless InternetDocument2 pagesCoverage and Capacity Optimization of Self Managed Wireless InternetGokulraj PandiyanPas encore d'évaluation
- Receiver ArchitecturesDocument40 pagesReceiver ArchitecturesGokulraj PandiyanPas encore d'évaluation
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (265)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (119)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Unit 4 DeadlocksDocument14 pagesUnit 4 DeadlocksMairos Kunze BongaPas encore d'évaluation
- Midterm & Final ExamDocument2 pagesMidterm & Final ExambcanturkyilmazPas encore d'évaluation
- Strength of Materials MarksDocument28 pagesStrength of Materials Markslogeshboy007Pas encore d'évaluation
- UCC Computer Science student explores greedy algorithmsDocument3 pagesUCC Computer Science student explores greedy algorithmsEmmanuel EshunPas encore d'évaluation
- Maxwell's EquationsDocument19 pagesMaxwell's EquationsEr Ashish Baheti100% (1)
- Javascript - Domain Fundamentals AssignmentsDocument43 pagesJavascript - Domain Fundamentals AssignmentsSana Fathima SanaPas encore d'évaluation
- Mechanical Vibration NotesDocument56 pagesMechanical Vibration NotesYadanaPas encore d'évaluation
- Design of Predictive Magic Cards.Document26 pagesDesign of Predictive Magic Cards.aries25th3Pas encore d'évaluation
- 199307Document87 pages199307vtvuckovicPas encore d'évaluation
- Correlation and RegressionDocument9 pagesCorrelation and RegressionMd Ibrahim MollaPas encore d'évaluation
- Calculate area under curveDocument6 pagesCalculate area under curvePunit Singh SahniPas encore d'évaluation
- Mock Test Paper 2013 (Answers)Document84 pagesMock Test Paper 2013 (Answers)Varun GuptaPas encore d'évaluation
- Brent Kung AdderDocument60 pagesBrent Kung AdderAnonymous gLVMeN2hPas encore d'évaluation
- Poisson's and Laplace Equations ExplainedDocument19 pagesPoisson's and Laplace Equations ExplainedMnskSaroPas encore d'évaluation
- Ejercicios Jackson ElectrodinamicaDocument46 pagesEjercicios Jackson ElectrodinamicahebertgoPas encore d'évaluation
- Final Advertisement of 551 NON Gazetted Posts of PBS - 220220 - 182252Document6 pagesFinal Advertisement of 551 NON Gazetted Posts of PBS - 220220 - 182252Ghulam HadiPas encore d'évaluation
- PHAR 7633 Chapter 19 Multi-Compartment Pharmacokinetic ModelsDocument23 pagesPHAR 7633 Chapter 19 Multi-Compartment Pharmacokinetic ModelsBandameedi RamuPas encore d'évaluation
- Subsea Control Systems SXGSSC PDFDocument6 pagesSubsea Control Systems SXGSSC PDFLimuel EspirituPas encore d'évaluation
- IIR FILTER COEFFICIENTSDocument2 pagesIIR FILTER COEFFICIENTSharun or rashidPas encore d'évaluation
- Determine Beam Deflection Using Integration and Geometric MethodsDocument8 pagesDetermine Beam Deflection Using Integration and Geometric MethodsNadiaPas encore d'évaluation
- Assignment 2Document2 pagesAssignment 2yathasamboPas encore d'évaluation
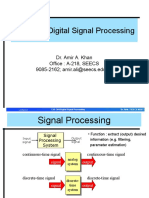
- CSE 304-Digital Signal Processing: Dr. Amir A. Khan Office: A-218, SEECS 9085-2162 Amir - Ali@seecs - Edu.pkDocument22 pagesCSE 304-Digital Signal Processing: Dr. Amir A. Khan Office: A-218, SEECS 9085-2162 Amir - Ali@seecs - Edu.pkAlamgir Ahmad KhattakPas encore d'évaluation
- CV Dr Mohammad ShahzadDocument5 pagesCV Dr Mohammad ShahzadTarique WaliPas encore d'évaluation
- TrigonometryDocument15 pagesTrigonometryJnanam100% (1)
- Notes On The Site That Takes CalculationsDocument7 pagesNotes On The Site That Takes CalculationsNurdin ŠabićPas encore d'évaluation
- Fisika Zat Padat I: Dosen: Dr. Iwantono, M.Phil Jurusan Fisika Fmipa-UrDocument78 pagesFisika Zat Padat I: Dosen: Dr. Iwantono, M.Phil Jurusan Fisika Fmipa-UrMailestari Wina YancePas encore d'évaluation
- Evolutionary Computation:: Genetic AlgorithmsDocument49 pagesEvolutionary Computation:: Genetic AlgorithmsShobanraj LetchumananPas encore d'évaluation
- Assessing Approaches To Genre ClassificationDocument72 pagesAssessing Approaches To Genre ClassificationAnonymous RrGVQjPas encore d'évaluation
- Box Cars and One Eyed Jacks Gr3to5Document38 pagesBox Cars and One Eyed Jacks Gr3to5api-337183055100% (1)
- TEST 1. TrigonometryDocument2 pagesTEST 1. TrigonometrySonia AroraPas encore d'évaluation