Vous aimerez peut-être aussi
- Amateur Radio Electronics on Your MobileD'EverandAmateur Radio Electronics on Your MobileÉvaluation : 5 sur 5 étoiles5/5 (1)
- Laser Communication: Mini Project ReportDocument15 pagesLaser Communication: Mini Project ReportPrasannaKumarReddyKaturuPas encore d'évaluation
- Laser Comm - ProjectDocument21 pagesLaser Comm - ProjectJaydeep SinhaPas encore d'évaluation
- Laser Torch Based Voice Transmitter and Receiver (Repaired)Document56 pagesLaser Torch Based Voice Transmitter and Receiver (Repaired)1deakz4lu7ge100% (3)
- Laser Torch Based Voice Transmitter and ReceiverDocument30 pagesLaser Torch Based Voice Transmitter and ReceiverUma Mahesh50% (4)
- Laser Based Communication System: AECD ProjectDocument11 pagesLaser Based Communication System: AECD ProjectSavanth ChandrasekharPas encore d'évaluation
- Ir Trans and ReceiverDocument13 pagesIr Trans and ReceiverAnil KumarPas encore d'évaluation
- Laser Communication System: ABSTRACT: Laser Communication Is One of The Key Area in Wireless CommunicationsDocument8 pagesLaser Communication System: ABSTRACT: Laser Communication Is One of The Key Area in Wireless CommunicationsSaurabh SinhaPas encore d'évaluation
- Ofc Module - 03Document7 pagesOfc Module - 03shameem v.pPas encore d'évaluation
- Ocn UNIT3-4-2marksDocument9 pagesOcn UNIT3-4-2marksVenu RamPas encore d'évaluation
- Optical Detectors in Fiber Optic ReceiversDocument83 pagesOptical Detectors in Fiber Optic Receiversali ghalibPas encore d'évaluation
- Report On Electromagnetic Wave DetectorDocument16 pagesReport On Electromagnetic Wave DetectorRahul TripathyPas encore d'évaluation
- Audio TransformersDocument4 pagesAudio TransformersCR AthiraPas encore d'évaluation
- Laser Communication System NaviDocument14 pagesLaser Communication System NaviNaveen Hg G100% (1)
- Laser Communication SystemDocument8 pagesLaser Communication Systemvickydylan100% (1)
- Aqib Rep4Document7 pagesAqib Rep4Warda TariqPas encore d'évaluation
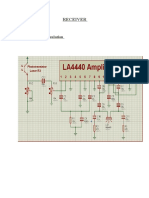
- Receiver: Protius Circuit SimulationDocument7 pagesReceiver: Protius Circuit SimulationWarda TariqPas encore d'évaluation
- Report of IR Sensor ProjectDocument13 pagesReport of IR Sensor ProjectHammad Umer0% (2)
- Eds Hardware ExplainedDocument28 pagesEds Hardware ExplainedSudhanshu SriPas encore d'évaluation
- LASER Diode Characteristics ManualDocument5 pagesLASER Diode Characteristics ManualRangothri Sreenivasa SubramanyamPas encore d'évaluation
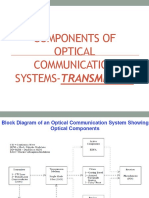
- Components of Optical Communication Systems-TransmitterDocument31 pagesComponents of Optical Communication Systems-TransmitterMuhammad HamidPas encore d'évaluation
- Optical Amplifiers: Presented BY Dr. Sudhir Kumar Sharma Associate ProfessorDocument33 pagesOptical Amplifiers: Presented BY Dr. Sudhir Kumar Sharma Associate ProfessorAnkit DattPas encore d'évaluation
- Wiless Led Seminar ReportDocument9 pagesWiless Led Seminar ReportSharanjeet KaurPas encore d'évaluation
- 2012IR Audio LinkDocument5 pages2012IR Audio LinkAnkush SilhiPas encore d'évaluation
- Electrical Engineering DepartmentDocument5 pagesElectrical Engineering DepartmentAlyssa Ashley RazoPas encore d'évaluation
- Optical Sources DetectorsDocument72 pagesOptical Sources DetectorsDivyank BhardwajPas encore d'évaluation
- Lect 16Document10 pagesLect 16Mohamed ShabanaPas encore d'évaluation
- ReportDocument49 pagesReportRaghu RamPas encore d'évaluation
- Assign 4175Document8 pagesAssign 4175Md pacificPas encore d'évaluation
- Syntonics AOC RF Over-Fiber 19 Jan 08Document51 pagesSyntonics AOC RF Over-Fiber 19 Jan 08Thanhtung TonthatPas encore d'évaluation
- Project Report SampleDocument13 pagesProject Report SampleEngr Bilal YounasPas encore d'évaluation
- Lecture8 Part2Document15 pagesLecture8 Part2ameerPas encore d'évaluation
- Bec-55 Unit 4Document59 pagesBec-55 Unit 4Abhishek kumar SinghPas encore d'évaluation
- Experiment No 1 Ana LogDocument9 pagesExperiment No 1 Ana LogMohsin TariqPas encore d'évaluation
- Silicon RF Mems Based Optical ModulatorDocument10 pagesSilicon RF Mems Based Optical ModulatorsundarmeenakshiPas encore d'évaluation
- Radio Over Fiber Technology Using Electro-Absorption ModulationDocument9 pagesRadio Over Fiber Technology Using Electro-Absorption ModulationMuneeb Raees MalikPas encore d'évaluation
- Optical CouplersDocument36 pagesOptical CouplersSyed muhammad zaidiPas encore d'évaluation
- Infrarrojos y UltrasónicosDocument81 pagesInfrarrojos y UltrasónicosgdiliogPas encore d'évaluation
- Ultrasonic RadarDocument6 pagesUltrasonic Radarricky100% (3)
- Laser 1 FinalDocument6 pagesLaser 1 FinalVaibhav BansalPas encore d'évaluation
- Communication ReportDocument47 pagesCommunication Reportitsdriftlover0112Pas encore d'évaluation
- Chapter-1 Optical Fiber CommunicationDocument24 pagesChapter-1 Optical Fiber CommunicationAkhil GargPas encore d'évaluation
- Assignment - 2 Optical CommunicationDocument5 pagesAssignment - 2 Optical CommunicationAsha palPas encore d'évaluation
- Optical Fiber Transmission: Institute of Technical Education and ResearchDocument24 pagesOptical Fiber Transmission: Institute of Technical Education and ResearchTanvi TanayaPas encore d'évaluation
- Lab 6 OptSimDocument3 pagesLab 6 OptSimGuillermo AramendiPas encore d'évaluation
- IR Sensor ReportDocument14 pagesIR Sensor ReportAbhijeet chaudhary100% (1)
- From Wikipedia, The Free EncyclopediaDocument7 pagesFrom Wikipedia, The Free EncyclopediaratannsPas encore d'évaluation
- Semiconductor Sources For Optical CommunicationsDocument54 pagesSemiconductor Sources For Optical CommunicationslaptopPas encore d'évaluation
- Laser Based CommunicationDocument10 pagesLaser Based CommunicationSavanth ChandrasekharPas encore d'évaluation
- Wireless Transmission of Audion & Data Using LaserDocument60 pagesWireless Transmission of Audion & Data Using LaserViraj PawarPas encore d'évaluation
- Detectors and Storage DevicesDocument32 pagesDetectors and Storage Devices7t854s6wd2Pas encore d'évaluation
- Fiber Optical Interview Questions and Answers-Optical QuestionnaireDocument49 pagesFiber Optical Interview Questions and Answers-Optical QuestionnaireBahzad100% (1)
- Sjeee 8Document5 pagesSjeee 8Adarsh VsPas encore d'évaluation
- Engineering Physics Unit II NotesDocument19 pagesEngineering Physics Unit II NotesFatherPas encore d'évaluation
- Opto Electronic Devices and Wave Shaping Circuits Study MaterialDocument11 pagesOpto Electronic Devices and Wave Shaping Circuits Study MaterialTejas BorkarPas encore d'évaluation
- DcomunDocument11 pagesDcomunzubair tahirPas encore d'évaluation
- Project Report Laser Communication SystemDocument6 pagesProject Report Laser Communication SystempradyumnPas encore d'évaluation
- CAI Assgnmnt 1Document8 pagesCAI Assgnmnt 1Ashok KumarPas encore d'évaluation
- EnvironmentalNoiseBooklet EnglishDocument69 pagesEnvironmentalNoiseBooklet EnglishAncu AncaPas encore d'évaluation
- WRT54GL ManualDocument41 pagesWRT54GL ManualNenad ArsenovicPas encore d'évaluation
- An Active Multimodal Sensing Platform For Remote Voice DetectionDocument6 pagesAn Active Multimodal Sensing Platform For Remote Voice DetectionperiodoPas encore d'évaluation
- EnvironmentalNoiseBooklet EnglishDocument69 pagesEnvironmentalNoiseBooklet EnglishAncu AncaPas encore d'évaluation
- Occupational Noise Exposure Standard and HearingDocument1 pageOccupational Noise Exposure Standard and HearingperiodoPas encore d'évaluation
- 1792 Brochure LPKF Drilling Milling Routing Tools en PDFDocument4 pages1792 Brochure LPKF Drilling Milling Routing Tools en PDFperiodoPas encore d'évaluation
- Miosha Occupational Noise Exposure StandardDocument26 pagesMiosha Occupational Noise Exposure StandardperiodoPas encore d'évaluation
- 3GPP TS 12.21Document63 pages3GPP TS 12.21periodoPas encore d'évaluation
- AN0021Document19 pagesAN0021periodoPas encore d'évaluation
- Miosha Occupational Noise Exposure StandardDocument26 pagesMiosha Occupational Noise Exposure StandardperiodoPas encore d'évaluation
- Asynchronous Transfer Mode (ATM)Document67 pagesAsynchronous Transfer Mode (ATM)periodoPas encore d'évaluation
- Vs 81ethDocument41 pagesVs 81ethperiodoPas encore d'évaluation
- TL-WR702N V1 User Guide 1910010880Document186 pagesTL-WR702N V1 User Guide 1910010880absu2278Pas encore d'évaluation
- GSM Transport Evolution: Background Technical Overview, Packet AbisDocument6 pagesGSM Transport Evolution: Background Technical Overview, Packet AbisperiodoPas encore d'évaluation
- Fix Abis Vs Flex AbisDocument23 pagesFix Abis Vs Flex AbisJimoh Yunus100% (1)
- DB RF3D 2 Engl WebDocument2 pagesDB RF3D 2 Engl WebperiodoPas encore d'évaluation
- DS34S101//DS34S102/DS34S104/DS34S108: Single/Dual/Quad/Octal TDM-Over-Packet Transport DevicesDocument69 pagesDS34S101//DS34S102/DS34S104/DS34S108: Single/Dual/Quad/Octal TDM-Over-Packet Transport DevicesperiodoPas encore d'évaluation
- 1G To 10G Ethernet Dynamic Switching Using Xilinx High Speed Serial IO Solution 1457061482 PDFDocument14 pages1G To 10G Ethernet Dynamic Switching Using Xilinx High Speed Serial IO Solution 1457061482 PDFperiodoPas encore d'évaluation
- Mixed Signal TestDocument14 pagesMixed Signal TestperiodoPas encore d'évaluation
- Reference DesignDocument4 pagesReference DesignperiodoPas encore d'évaluation
- Mixed Signal Embedded ProgrammingDocument268 pagesMixed Signal Embedded ProgrammingPavan Kumar100% (14)
- AdcDocument18 pagesAdcperiodoPas encore d'évaluation
- 8051 NotesDocument33 pages8051 NotesperiodoPas encore d'évaluation
- Col 10250Document41 pagesCol 10250edgarbgesPas encore d'évaluation
- C8051F340 OscDocument11 pagesC8051F340 OscperiodoPas encore d'évaluation
- DGO9 InstallDocument23 pagesDGO9 InstallairmasterPas encore d'évaluation
- Service Manual: Power Quality AnalyzerDocument164 pagesService Manual: Power Quality AnalyzereduPas encore d'évaluation
- Shakespeare ResourcesDocument13 pagesShakespeare ResourcesIrina Stoica100% (1)
- Pact Rates 09Document37 pagesPact Rates 09hbPas encore d'évaluation
- Conjunction PracticeDocument4 pagesConjunction PracticePriscilla LacayoPas encore d'évaluation
- MMS5 ShawDocument97 pagesMMS5 ShawHans DörrscheidtPas encore d'évaluation
- 100 Conversational French PhrasesDocument12 pages100 Conversational French PhrasesNishant Sharma100% (1)
- Big Band EraDocument248 pagesBig Band Erashiloh32575% (4)
- InteriorDocument3 pagesInteriorInna's ArtistryPas encore d'évaluation
- Final Edit 054Document402 pagesFinal Edit 054David ChildersPas encore d'évaluation
- Dialog Check OutDocument5 pagesDialog Check OutLily ValensiaPas encore d'évaluation
- Netmanias.2019.01.29 - 5G Traffic FlowDocument1 pageNetmanias.2019.01.29 - 5G Traffic FlowFiras Ibrahim Al-HamdanyPas encore d'évaluation
- Echo Sounders: Asst. Prof. Dr. Ender AsyalıDocument33 pagesEcho Sounders: Asst. Prof. Dr. Ender AsyalıGf MilesPas encore d'évaluation
- Death of A Salesman: Grade 9 - RutherfordDocument22 pagesDeath of A Salesman: Grade 9 - RutherfordPat RIwen BabaoPas encore d'évaluation
- 2018 Essentially Ellington Playbill ProgramDocument24 pages2018 Essentially Ellington Playbill Programowen-drummond 10572Pas encore d'évaluation
- Summative Assessment For The Seventh Unit "Music and Films" Reading / Task 1. Read The TextDocument1 pageSummative Assessment For The Seventh Unit "Music and Films" Reading / Task 1. Read The TextDmitry KolesnichenkoPas encore d'évaluation
- Midterm EE456 11Document4 pagesMidterm EE456 11Erdinç KayacıkPas encore d'évaluation
- Tartuffe Study Guide PDFDocument13 pagesTartuffe Study Guide PDFGabriella BakaPas encore d'évaluation
- LA1259Document1 pageLA1259Aldo MartínezPas encore d'évaluation
- Wise Willis - The Funky KnucklesDocument14 pagesWise Willis - The Funky KnucklesAngel DarioPas encore d'évaluation
- IMSLP690661-PMLP02189-Symphonic Studies Op 13Document71 pagesIMSLP690661-PMLP02189-Symphonic Studies Op 13Jorge GuzmanPas encore d'évaluation
- Questions 1-5: KET Practice TestDocument6 pagesQuestions 1-5: KET Practice TestClases inglés onlinePas encore d'évaluation
- Bond Victory CelloDocument3 pagesBond Victory CelloJC Nafarrete50% (2)
- Infiniti FX AV ManualDocument192 pagesInfiniti FX AV ManualMarius DeacPas encore d'évaluation
- Annex 8 IR24 DirectDocument44 pagesAnnex 8 IR24 Directanat17Pas encore d'évaluation
- Air Interface Protocol Air Interface Application Protocol v234 PDFDocument167 pagesAir Interface Protocol Air Interface Application Protocol v234 PDFtetrapoltestPas encore d'évaluation
- Collecting, Archiving, and Exhibiting Digital Design DataDocument54 pagesCollecting, Archiving, and Exhibiting Digital Design DataStephanie HyodoPas encore d'évaluation
- Huawei BTS3006C System DescriptionDocument36 pagesHuawei BTS3006C System DescriptionImran KhaliqPas encore d'évaluation
- Phil LitDocument2 pagesPhil LitNimrod CabreraPas encore d'évaluation
- Stewart Mcdonald Plans GuitarsDocument40 pagesStewart Mcdonald Plans GuitarsHide Pandini100% (1)