Vous aimerez peut-être aussi
- Estimación de canal MIMO en ondas milimétricas mediante motores de juegos y aceleración por HardwareD'EverandEstimación de canal MIMO en ondas milimétricas mediante motores de juegos y aceleración por HardwarePas encore d'évaluation
- Proyecto Red LANDocument18 pagesProyecto Red LANRoberto Osuna YescasPas encore d'évaluation
- 013 - Pines GPIO en PythonDocument32 pages013 - Pines GPIO en Pythonbryan villamizarPas encore d'évaluation
- Servo MotoresDocument8 pagesServo Motoresveguillas1973Pas encore d'évaluation
- T2 Investigacion DeterminantesDocument15 pagesT2 Investigacion DeterminantesJavier Castañon CortezPas encore d'évaluation
- Mas de 400 Comandos para Gnu Linux PDFDocument88 pagesMas de 400 Comandos para Gnu Linux PDFPeter BonillaPas encore d'évaluation
- PLCDocument25 pagesPLCEdwindows Humbble Machaca AsquiPas encore d'évaluation
- Arquitectura Dispositivos MóvilesDocument16 pagesArquitectura Dispositivos MóvilesMauricio SanchezPas encore d'évaluation
- PFC Antonio Blanco Martin PDFDocument191 pagesPFC Antonio Blanco Martin PDFJavi Herrera100% (1)
- Ntroducción A Vision Builder y Tutorial 1Document13 pagesNtroducción A Vision Builder y Tutorial 1Wood Cross ArmandoPas encore d'évaluation
- Manual para Encender 8 Leds Mediante El Puerto ParaleloDocument6 pagesManual para Encender 8 Leds Mediante El Puerto ParaleloSeñoriitaa Salgado100% (1)
- Practica 5 Programador Serial ICSP DsPIC30F4013Document4 pagesPractica 5 Programador Serial ICSP DsPIC30F4013Arturo LopezPas encore d'évaluation
- Set de Problemas Básicos PropuestosDocument5 pagesSet de Problemas Básicos PropuestosJIRETH ELIAS PARRA BOSSA100% (1)
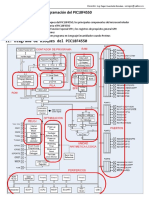
- P01 Modelo de Programación Del PIC18F4550Document14 pagesP01 Modelo de Programación Del PIC18F4550Fide Alvarado100% (1)
- Adreçament IPDocument4 pagesAdreçament IPFlorin a14 ArdeleanPas encore d'évaluation
- Subneteo de RedesDocument11 pagesSubneteo de RedesMaria RosaPas encore d'évaluation
- ServoMotor Con ArduinoDocument8 pagesServoMotor Con ArduinoLaboratorio de Robótica Educativa UTN-FRTPas encore d'évaluation
- Manual de Configuración Modem 2 WireDocument4 pagesManual de Configuración Modem 2 WireOsKar KoKa100% (1)
- Minibloq v0 81 Beta Usermanual SP 20120522Document60 pagesMinibloq v0 81 Beta Usermanual SP 20120522Roberto Fiorillo100% (2)
- Microcontroladores Con PROTON IDEDocument9 pagesMicrocontroladores Con PROTON IDEDaniel GiraldoPas encore d'évaluation
- CCNA 1 Capítulo 3 v5Document5 pagesCCNA 1 Capítulo 3 v5zdiaz1100% (7)
- Algebra BooleanaDocument44 pagesAlgebra BooleanaCristian MedinaPas encore d'évaluation
- Laboratorio de Protocolos de RedesDocument16 pagesLaboratorio de Protocolos de Redesdanny alcedoPas encore d'évaluation
- Indice Curso de Programacion Pic en C Con CcsDocument112 pagesIndice Curso de Programacion Pic en C Con CcsCHUCIPas encore d'évaluation
- Anexo Tema 5 Tablas Encaminamiento PDFDocument6 pagesAnexo Tema 5 Tablas Encaminamiento PDFAlbertoPas encore d'évaluation
- AlgoritmosDocument38 pagesAlgoritmosj552926Pas encore d'évaluation
- Manual Crunch EspañolDocument8 pagesManual Crunch Españoloxído el proPas encore d'évaluation
- Simulación Implementación de Una Red LAN Empresarial SeguraDocument6 pagesSimulación Implementación de Una Red LAN Empresarial SeguraPriscila Noh Campos0% (1)
- Clase 14 - Memoria - Algoritmos Reemplazo de Paginas PDFDocument29 pagesClase 14 - Memoria - Algoritmos Reemplazo de Paginas PDFdanielaPas encore d'évaluation
- Trabajo Top 500Document7 pagesTrabajo Top 500FernandoPas encore d'évaluation
- Manual Jana ServerDocument20 pagesManual Jana ServerTecnologia Educativa Al Alcance de TodosPas encore d'évaluation
- Pirámide Cim PDFDocument8 pagesPirámide Cim PDFJulian ToscanoPas encore d'évaluation
- Diseño de Un Datacenter para Implementar La Supracomputadora en La UNICADocument74 pagesDiseño de Un Datacenter para Implementar La Supracomputadora en La UNICAReiner Campos RequelmePas encore d'évaluation
- Arduino y Módulo Inalámbrico RF APC220 - TuElectronica - EsDocument7 pagesArduino y Módulo Inalámbrico RF APC220 - TuElectronica - EsMarcelo LorencPas encore d'évaluation
- 1.5 Interface GpibDocument39 pages1.5 Interface GpibDany CAPas encore d'évaluation
- Tutorial ProtonDocument7 pagesTutorial ProtonMaria Esperanza Salazar RPas encore d'évaluation
- Lenguajes Independientes Del ContextoDocument11 pagesLenguajes Independientes Del ContextofernandoPas encore d'évaluation
- Cluster de Alta Disponibilidad PacemakerDocument9 pagesCluster de Alta Disponibilidad PacemakermvazuruguayPas encore d'évaluation
- Unidad 8 Tolerancia A FallasDocument4 pagesUnidad 8 Tolerancia A FallasHomero Peralta PintoPas encore d'évaluation
- Arquitectura de Los Dispositivos MóvilesDocument16 pagesArquitectura de Los Dispositivos MóvilesOnan Omar Sánchez SerranoPas encore d'évaluation
- Replicacion Con SlonyDocument15 pagesReplicacion Con SlonycarlosPas encore d'évaluation
- Codigocomentadi 2Document18 pagesCodigocomentadi 2Jose CanalesPas encore d'évaluation
- Informe ProteusDocument6 pagesInforme ProteusSamirPas encore d'évaluation
- Manejo de Un Servo Motor Con RaspberryDocument2 pagesManejo de Un Servo Motor Con RaspberryJunior Ademir Flores VargasPas encore d'évaluation
- Administración de Sistemas WindowsDocument74 pagesAdministración de Sistemas WindowsADRIAN ZANINI100% (1)
- Introduccion LabviewDocument59 pagesIntroduccion LabviewDaniel JaramilloPas encore d'évaluation
- Protocolo y Encabezado Ipv4Document15 pagesProtocolo y Encabezado Ipv4Rafael G. DoriaPas encore d'évaluation
- Modulo 1 - Python ProgramingDocument9 pagesModulo 1 - Python Programingbryan pinedaPas encore d'évaluation
- Sim 808Document5 pagesSim 808jimmyPas encore d'évaluation
- Software, Hardware y Firware 2Document3 pagesSoftware, Hardware y Firware 2Jorge Capielo0% (1)
- Práctica - 3.3. - UNIXDocument9 pagesPráctica - 3.3. - UNIXprofesoraemPas encore d'évaluation
- LABORATORIO 1.3 - Instalacion de RouterOSDocument19 pagesLABORATORIO 1.3 - Instalacion de RouterOSDiego LaymePas encore d'évaluation
- Ademco Vista 20 Installation ManualDocument130 pagesAdemco Vista 20 Installation Manualtokuro_22100% (1)
- Proyecto Informatica Red LanDocument61 pagesProyecto Informatica Red LansorbenitaPas encore d'évaluation
- Controlar Ultrasonido Con Raspberry Pi 3Document5 pagesControlar Ultrasonido Con Raspberry Pi 3Ener PostPas encore d'évaluation
- Examen Electrónica de PotenciaDocument5 pagesExamen Electrónica de PotenciaChristian QC100% (1)
- Anexo - Configuracion de PLC y HMIDocument7 pagesAnexo - Configuracion de PLC y HMIGianfranco MezaPas encore d'évaluation
- Lab3 Inicialización GPIODocument4 pagesLab3 Inicialización GPIOLuisAzcorraEspadasPas encore d'évaluation
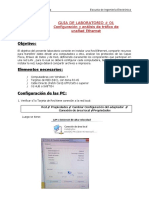
- Guía de Laboratorio No. 7 Configuración de Protocolo de Enrutamiento RIPDocument18 pagesGuía de Laboratorio No. 7 Configuración de Protocolo de Enrutamiento RIPgaming worldPas encore d'évaluation
- Robo de La Joya Presidencial Realidad o MontajeDocument6 pagesRobo de La Joya Presidencial Realidad o MontajeEner PostPas encore d'évaluation
- Dia de La Bandera 17 de AgostoDocument2 pagesDia de La Bandera 17 de AgostoEner PostPas encore d'évaluation
- Informe Final de MecanismosDocument4 pagesInforme Final de MecanismosEner PostPas encore d'évaluation
- Día de La BanderaDocument2 pagesDía de La BanderaEner PostPas encore d'évaluation
- Proyecto ExoesqueletoDocument17 pagesProyecto ExoesqueletoEner PostPas encore d'évaluation
- Proyecto ExoesqueletoDocument17 pagesProyecto ExoesqueletoEner Post100% (1)
- Tesis Marco Practico 100% CorregidoDocument203 pagesTesis Marco Practico 100% CorregidoEner PostPas encore d'évaluation
- CNC CaseraDocument8 pagesCNC CaseraEner Post100% (1)
- Controlar Ultrasonido Con Raspberry Pi 3Document5 pagesControlar Ultrasonido Con Raspberry Pi 3Ener PostPas encore d'évaluation
- CalisteniaDocument10 pagesCalisteniaEner PostPas encore d'évaluation
- SemaforoDocument3 pagesSemaforoEner PostPas encore d'évaluation
- Yan Ken Po ArduinoDocument7 pagesYan Ken Po ArduinoEner PostPas encore d'évaluation
- Experimento Con SCRDocument6 pagesExperimento Con SCREner PostPas encore d'évaluation
- Norma Boliviana Nb-Contrucccion AceroDocument10 pagesNorma Boliviana Nb-Contrucccion AceroEner PostPas encore d'évaluation
- SEMAFORODocument3 pagesSEMAFOROEner PostPas encore d'évaluation
- Proyecto Torreta de Control Buscador de Blancos Con Arduino y ProcessingDocument15 pagesProyecto Torreta de Control Buscador de Blancos Con Arduino y ProcessingEner PostPas encore d'évaluation
- Norma Boliviana Nb-Contrucccion AceroDocument10 pagesNorma Boliviana Nb-Contrucccion AceroEner PostPas encore d'évaluation
- Tipos de ServidoresDocument15 pagesTipos de ServidoresEner PostPas encore d'évaluation
- Taller Número 1 - EstainfeDocument4 pagesTaller Número 1 - EstainfeARIZA FONTECHA DIEGO ALEJANDROPas encore d'évaluation
- PaumatcsiialgebraDocument14 pagesPaumatcsiialgebraAbel Sarcco UstoPas encore d'évaluation
- SemejanzaDocument4 pagesSemejanzaMiguelPas encore d'évaluation
- El Punto PresentaciónDocument11 pagesEl Punto Presentaciónedantalv100% (2)
- Informe de Soluciones Salinas y CrudoDocument43 pagesInforme de Soluciones Salinas y Crudojesus100% (1)
- INFORME 2009 Fisica IIDocument168 pagesINFORME 2009 Fisica IIWilliam Taipe50% (2)
- MSDS MeropaDocument7 pagesMSDS MeropaPiero Lenti SoriaPas encore d'évaluation
- ¿Qué Es El Hombre en El Infinito?Document3 pages¿Qué Es El Hombre en El Infinito?ndoooPas encore d'évaluation
- Diseño Antena para TDTDocument1 pageDiseño Antena para TDTJose AngelPas encore d'évaluation
- Taller 2 - Estadistica (1) 5Document4 pagesTaller 2 - Estadistica (1) 5Mayolly Tocora vargasPas encore d'évaluation
- La Arqueología Del SaberDocument6 pagesLa Arqueología Del SaberrodrigoPas encore d'évaluation
- Tema LecDocument15 pagesTema LecSebastian VergaraPas encore d'évaluation
- DesventajasDocument2 pagesDesventajasDaniel AstudilloPas encore d'évaluation
- Tarea 3 - Rafael Velasquez - Grupo 201102 - 37Document12 pagesTarea 3 - Rafael Velasquez - Grupo 201102 - 37rafael velasquezPas encore d'évaluation
- Ley de BoyleDocument5 pagesLey de BoyleJhamilita TicliahuancaPas encore d'évaluation
- Estudio de CargaDocument3 pagesEstudio de Cargatyrion100% (1)
- Historia o Antecedentes Del Origen Del Diagrama de Pert-CpmDocument2 pagesHistoria o Antecedentes Del Origen Del Diagrama de Pert-CpmLuisHinojosaCasanova100% (3)
- Cadencia Napolitana y FrigiaDocument3 pagesCadencia Napolitana y FrigiaNoel Leandro Ramirez RiveraPas encore d'évaluation
- Formulas Básicas de EntropíaDocument4 pagesFormulas Básicas de EntropíaGASTON RIVERA MONTOYAPas encore d'évaluation
- Cuadro Comparativo de Los Tipos de Soldadura.Document4 pagesCuadro Comparativo de Los Tipos de Soldadura.MarcoPas encore d'évaluation
- Matme23e2b 4Document66 pagesMatme23e2b 4Tía Francisca RojasPas encore d'évaluation
- Texto 10°matem - Curriculo PriorizadoDocument276 pagesTexto 10°matem - Curriculo PriorizadoJairo Andrade X100% (1)
- Manual de ServicioDocument25 pagesManual de ServicioCristhian AyerbePas encore d'évaluation
- Oscilador Armónico Forzado: Amortiguamiento - ResonanciaDocument17 pagesOscilador Armónico Forzado: Amortiguamiento - ResonanciaMILTON PERCY VARGAS NINASIVINCHAPas encore d'évaluation
- Razones, Proporciones y PorcentajesDocument24 pagesRazones, Proporciones y PorcentajesRosaury Castro De LunaPas encore d'évaluation
- Estructuras SedimentariasDocument42 pagesEstructuras Sedimentariasluis_1024Pas encore d'évaluation
- Aprender en Siglo 21 TP2Document13 pagesAprender en Siglo 21 TP2camilo bacelliPas encore d'évaluation
- Arcos Estaicamente DeterminadoDocument16 pagesArcos Estaicamente DeterminadoCarmen CallizayaPas encore d'évaluation
- Intervalos para El Cálculo Del VanDocument20 pagesIntervalos para El Cálculo Del VanLiliana Bueno NinaPas encore d'évaluation
- Termo Unidad 2Document31 pagesTermo Unidad 2Amairani BasultoPas encore d'évaluation