Vous aimerez peut-être aussi
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (119)
- Detroit GHG17 Heavy Duty Troubleshooting Manual PDFDocument3 104 pagesDetroit GHG17 Heavy Duty Troubleshooting Manual PDFJoel Colter100% (17)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Motor Control Center Details for Umiam Stage-II Hydro ProjectDocument14 pagesMotor Control Center Details for Umiam Stage-II Hydro ProjectKunik Swaroop0% (1)
- Sterlization of Water Using Bleaching Powder PDFDocument20 pagesSterlization of Water Using Bleaching Powder PDFradha krishnanPas encore d'évaluation
- Fundamentals of Programming C++Document647 pagesFundamentals of Programming C++Agustin Alvarez100% (1)
- FN 98 Mauser Model 98 Rifle Operators ManualDocument28 pagesFN 98 Mauser Model 98 Rifle Operators ManualAdam Ward100% (1)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- Khmer Rouge Division 703Document216 pagesKhmer Rouge Division 703VienNgocQuang100% (1)
- Vodafone Bid HBS Case - ExhibitsDocument13 pagesVodafone Bid HBS Case - ExhibitsNaman PorwalPas encore d'évaluation
- Fourth Monthly Exam T.L.E 7 S.Y. 2019 - 2020Document2 pagesFourth Monthly Exam T.L.E 7 S.Y. 2019 - 2020riela dhee lagramaPas encore d'évaluation
- The Silenced de Lisle Commando CarbineDocument6 pagesThe Silenced de Lisle Commando CarbineVienNgocQuang100% (1)
- Blockchain Unconfirmed Transaction Hack Script Docx PDF FreeDocument2 pagesBlockchain Unconfirmed Transaction Hack Script Docx PDF FreeHealing Relaxing Sleep Music100% (1)
- Cam Total WarDocument142 pagesCam Total WarVienNgocQuangPas encore d'évaluation
- T-34 in Angola 1970s 1980s - WwiiafterwwiiDocument24 pagesT-34 in Angola 1970s 1980s - WwiiafterwwiiVienNgocQuang100% (1)
- Lee-Enfield Rifle RF Short MksI and II (II)Document4 pagesLee-Enfield Rifle RF Short MksI and II (II)VienNgocQuangPas encore d'évaluation
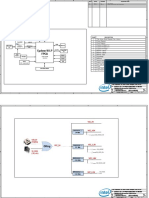
- c10lp Eval A1 SCHDocument56 pagesc10lp Eval A1 SCHVienNgocQuangPas encore d'évaluation
- Sc11 Cuda C BasicsDocument68 pagesSc11 Cuda C BasicsPoncho CoetoPas encore d'évaluation
- c10lp Eval A1 SCHDocument17 pagesc10lp Eval A1 SCHVienNgocQuangPas encore d'évaluation
- GTC Express Itseez Opencv Webinar PDFDocument35 pagesGTC Express Itseez Opencv Webinar PDFazazel17Pas encore d'évaluation
- Workshop Manual (Eng-Rus)Document40 pagesWorkshop Manual (Eng-Rus)VienNgocQuangPas encore d'évaluation
- ch2 PDFDocument6 pagesch2 PDFVienNgocQuangPas encore d'évaluation
- Role Profile Teaching Assistant HCMCDocument4 pagesRole Profile Teaching Assistant HCMCVienNgocQuangPas encore d'évaluation
- OpenCV Introduction: Getting Started with Image ProcessingDocument29 pagesOpenCV Introduction: Getting Started with Image ProcessingVienNgocQuang100% (1)
- c10lp Eval A1 SCHDocument17 pagesc10lp Eval A1 SCHVienNgocQuangPas encore d'évaluation
- C For MathematiciansDocument41 pagesC For MathematicianschinssuPas encore d'évaluation
- E911 Provisioning System Software Test PlanDocument11 pagesE911 Provisioning System Software Test PlanVienNgocQuangPas encore d'évaluation
- Angle Iload Uload IsDocument10 pagesAngle Iload Uload IsVienNgocQuangPas encore d'évaluation
- Industrial Sensors (Electromagnetic Flowmeter, Density (Consistency) Meter, Pressure Transmitter and Water Treatment Analyzer)Document1 pageIndustrial Sensors (Electromagnetic Flowmeter, Density (Consistency) Meter, Pressure Transmitter and Water Treatment Analyzer)VienNgocQuangPas encore d'évaluation
- Lee-Enfield Rifle 22RF Pattern 14Document5 pagesLee-Enfield Rifle 22RF Pattern 14VienNgocQuangPas encore d'évaluation
- DllmeDocument1 pageDllmeVienNgocQuangPas encore d'évaluation
- MP 2Document3 pagesMP 2VienNgocQuangPas encore d'évaluation
- MP 1Document4 pagesMP 1VienNgocQuangPas encore d'évaluation
- Facial Feature Extraction and Pose DeterminationDocument20 pagesFacial Feature Extraction and Pose DeterminationVienNgocQuangPas encore d'évaluation
- TOSHIBA Global Internship 2018 - Application Guidelines & Position ListDocument17 pagesTOSHIBA Global Internship 2018 - Application Guidelines & Position ListVienNgocQuangPas encore d'évaluation
- MP 3Document3 pagesMP 3VienNgocQuangPas encore d'évaluation
- JM 154Document226 pagesJM 154VienNgocQuangPas encore d'évaluation
- People Republic of KampucheaDocument129 pagesPeople Republic of KampucheaVienNgocQuangPas encore d'évaluation
- Summary and Future WorkDocument2 pagesSummary and Future WorkVienNgocQuangPas encore d'évaluation
- SummaryDocument1 pageSummaryVienNgocQuangPas encore d'évaluation
- S7 314 IFM: Hardware and InstallationDocument87 pagesS7 314 IFM: Hardware and InstallationNitko NetkoPas encore d'évaluation
- Pipesim Model Management Program: For Reservoir, Production, and Process ModelingDocument2 pagesPipesim Model Management Program: For Reservoir, Production, and Process ModelingMauricio AlvaradoPas encore d'évaluation
- Hitachi ZW550Document12 pagesHitachi ZW550ForomaquinasPas encore d'évaluation
- Touareg FL Dimensions PDFDocument2 pagesTouareg FL Dimensions PDFZeljko PekicPas encore d'évaluation
- Matrix Assisted Laser Desorption Ionization Mass Spectrometry Maldi-Tof MsDocument4 pagesMatrix Assisted Laser Desorption Ionization Mass Spectrometry Maldi-Tof MsElizabeth Katherine Aigaje EspinosaPas encore d'évaluation
- Tower 3300 Instruction ManualDocument23 pagesTower 3300 Instruction ManualMark RobertsPas encore d'évaluation
- 50-555circuits 2 PDFDocument102 pages50-555circuits 2 PDFAlfonso RamosPas encore d'évaluation
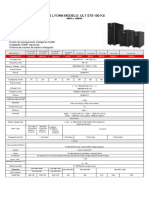
- Ups Lyonn Modelo: Ult St5-100 KS: 10KVA A 120KVADocument1 pageUps Lyonn Modelo: Ult St5-100 KS: 10KVA A 120KVASebastian Matias CruzPas encore d'évaluation
- Transient Step Response Specification of Z-Source DC-DC ConverterDocument5 pagesTransient Step Response Specification of Z-Source DC-DC ConverterijsretPas encore d'évaluation
- MQTT RGB Light For HomeDocument3 pagesMQTT RGB Light For HomearevazhagunvcPas encore d'évaluation
- Financial Modelling Assignment - Ghizal Naqvi (Attock Petroleum Limited)Document13 pagesFinancial Modelling Assignment - Ghizal Naqvi (Attock Petroleum Limited)Ghizal NaqviPas encore d'évaluation
- Grading CapacitorsDocument4 pagesGrading CapacitorsenmavelPas encore d'évaluation
- 19Ma2Icmat Module 5 - Elementary Numerical MethodsDocument4 pages19Ma2Icmat Module 5 - Elementary Numerical Methods1DS19CH011 Jashwanth C RPas encore d'évaluation
- Problem 13.3Document2 pagesProblem 13.3kannyPas encore d'évaluation
- Spread of Virus ModelledDocument2 pagesSpread of Virus ModelledDouglas TanPas encore d'évaluation
- Simple Backup/Restore Utility With SQL-: Introduction To SQL-DMODocument8 pagesSimple Backup/Restore Utility With SQL-: Introduction To SQL-DMOZaeni Marjiyanto, A.mdPas encore d'évaluation
- Faculty of Engineering Mechanical Engineering Program: Vibration Engineering Lab: KM31401: LAB IVDocument7 pagesFaculty of Engineering Mechanical Engineering Program: Vibration Engineering Lab: KM31401: LAB IVhasmikaPas encore d'évaluation
- L6565 DatasheetDocument17 pagesL6565 DatasheetJose BenavidesPas encore d'évaluation
- Install and Set Up Heavy Duty Plate Cutting MachineDocument14 pagesInstall and Set Up Heavy Duty Plate Cutting MachineJorn StejnPas encore d'évaluation
- Mathematical Induction, Peano Axioms, and Properties of Addition of Non-Negative IntegersDocument13 pagesMathematical Induction, Peano Axioms, and Properties of Addition of Non-Negative IntegersMarius PaunescuPas encore d'évaluation
- Dell EMC Avamar NDMP Accelerator For NASDocument58 pagesDell EMC Avamar NDMP Accelerator For NASmanish.puri.gcpPas encore d'évaluation
- AP+Bio 013+Photosynthesis++Respiration+Worksheet WLDocument2 pagesAP+Bio 013+Photosynthesis++Respiration+Worksheet WLVincent SuarezPas encore d'évaluation
- Airy stress function enables determination of stress components in pure beam bendingDocument19 pagesAiry stress function enables determination of stress components in pure beam bendingmaran.suguPas encore d'évaluation