Vous aimerez peut-être aussi
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5795)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (345)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1091)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- LUCY Package Substation BrochureDocument6 pagesLUCY Package Substation BrochureShu Yan Cheung0% (1)
- 5-1 DPR - Project Development and DPRDocument19 pages5-1 DPR - Project Development and DPRSayed NagyPas encore d'évaluation
- NERS Scope Guidance V 3 0 July 2014Document3 pagesNERS Scope Guidance V 3 0 July 2014crapPas encore d'évaluation
- Installation and Operation ManualDocument81 pagesInstallation and Operation ManualOscar Moreno0% (1)
- CP Eaf Maf 01 B2Document1 pageCP Eaf Maf 01 B2Venkitesh PG100% (1)
- Protection of Substation: 3.1. Lightning ArrestorsDocument4 pagesProtection of Substation: 3.1. Lightning ArrestorsMuhammad Asif IqbalPas encore d'évaluation
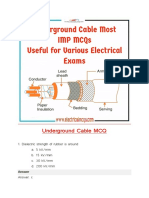
- Underground Cable MCQDocument42 pagesUnderground Cable MCQshukla dhavalPas encore d'évaluation
- 1 - Management of Electrical SafetyDocument38 pages1 - Management of Electrical SafetyMock ProjectPas encore d'évaluation
- STATCOM For RailwaysDocument5 pagesSTATCOM For RailwaysDebayan BhattacharyaPas encore d'évaluation
- BK117C2 B1 ED2REV4 09 Electrical System 14.06.2016 eDocument101 pagesBK117C2 B1 ED2REV4 09 Electrical System 14.06.2016 eЕвгений КасьяновPas encore d'évaluation
- Ts108 Technical Standard For Distribution Equipment and Transformer RoomsDocument30 pagesTs108 Technical Standard For Distribution Equipment and Transformer RoomsHimdad TahirPas encore d'évaluation
- Wiring For Light and PowerDocument18 pagesWiring For Light and PoweriakongPas encore d'évaluation
- Low VoltageDocument20 pagesLow VoltageFarhan ShahPas encore d'évaluation
- F200Document18 pagesF200Mohammed Madi100% (1)
- L3-BEKG2433-Three Phase Part 1 PDFDocument18 pagesL3-BEKG2433-Three Phase Part 1 PDFAhmad WahiPas encore d'évaluation
- Technical Specification FOR Material Handling System: SPECIFICATION NO.: SPCL-T495/GRAFIX/A-100/GEN-Rev05Document33 pagesTechnical Specification FOR Material Handling System: SPECIFICATION NO.: SPCL-T495/GRAFIX/A-100/GEN-Rev05anindya.basu859217Pas encore d'évaluation
- An Internship Report On ABB INDIA (Repaired)Document72 pagesAn Internship Report On ABB INDIA (Repaired)SHRAVYA MANJUNATH75% (4)
- X1 Boost User Manual 614.00392.016368679644974218947218417Document24 pagesX1 Boost User Manual 614.00392.016368679644974218947218417John Alfred VillaPas encore d'évaluation
- Flight Control Actuation Technology For Next-Generation All-Electric AircraftDocument14 pagesFlight Control Actuation Technology For Next-Generation All-Electric AircraftwalterPas encore d'évaluation
- ELSD310B Electrical System DesignDocument3 pagesELSD310B Electrical System DesignKendall BirjuePas encore d'évaluation
- Meralco Guidelines On Service AvailabilityDocument3 pagesMeralco Guidelines On Service AvailabilityRemo Rubian EvangelistaPas encore d'évaluation
- Company Introduction (CSEEC)Document37 pagesCompany Introduction (CSEEC)Jonathan EffendyPas encore d'évaluation
- Flight Test Handbook.: SubsystemsDocument105 pagesFlight Test Handbook.: SubsystemsHarish MahadevanPas encore d'évaluation
- Root Cause Analysis TransformerDocument81 pagesRoot Cause Analysis TransformerarsalanhamidPas encore d'évaluation
- Electric Load Management in IndustryDocument90 pagesElectric Load Management in IndustryHans De Keulenaer100% (23)
- PDI+1000 am1+-+Protection+of+High+Voltage+PlantDocument75 pagesPDI+1000 am1+-+Protection+of+High+Voltage+PlantTosikur Rahman100% (1)
- Building Systems and SolutionsDocument124 pagesBuilding Systems and SolutionsSaravanamuthu GPas encore d'évaluation
- Workhorses of Industry: Industrial Transformers in A DC EnvironmentDocument7 pagesWorkhorses of Industry: Industrial Transformers in A DC Environmentreza515heiPas encore d'évaluation
- 500 KV Grid StationsDocument4 pages500 KV Grid Stationssmartleo_waloPas encore d'évaluation
- Sc3 Lecture Short CKT Currents BMR Feb.03, 2021Document11 pagesSc3 Lecture Short CKT Currents BMR Feb.03, 2021Khizer AminPas encore d'évaluation