Vous aimerez peut-être aussi
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- Nonlinear SystemsDocument1 pageNonlinear Systemskgeorgek13Pas encore d'évaluation
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- NASIONAL - Perbaikan Proses Delivery Dokumen Maintenance C-CheckDocument12 pagesNASIONAL - Perbaikan Proses Delivery Dokumen Maintenance C-CheckYolandaPas encore d'évaluation
- Big Book of Data Warehousing and Bi v9 122723 Final 0Document88 pagesBig Book of Data Warehousing and Bi v9 122723 Final 0AblekkPas encore d'évaluation
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Vibration Reduction of Gantry CraneDocument7 pagesVibration Reduction of Gantry CraneHosseinPas encore d'évaluation
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- Lecture Notes On Optimization MethodsDocument252 pagesLecture Notes On Optimization MethodsA.Benhari100% (14)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- Lead Lead Lag CompensatorDocument11 pagesLead Lead Lag CompensatorHakimi BobPas encore d'évaluation
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- Ece006 Labexercise12Document15 pagesEce006 Labexercise12Krizzia Anne ShengPas encore d'évaluation
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- Variable Impedance Control A Reinforcement LearninDocument9 pagesVariable Impedance Control A Reinforcement Learnin이재봉Pas encore d'évaluation
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Tarea 2 - Solución de Modelos de Programación Lineal de DecisiónDocument9 pagesTarea 2 - Solución de Modelos de Programación Lineal de DecisiónMaria OrozcoPas encore d'évaluation
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- Lecture 12-13 Time Domain Analysis of 1st Order SystemsDocument56 pagesLecture 12-13 Time Domain Analysis of 1st Order SystemsKemal ZhafPas encore d'évaluation
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
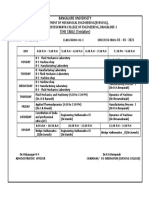
- Bangalore University TIME TABLE (Tentative)Document1 pageBangalore University TIME TABLE (Tentative)Manjot SinghPas encore d'évaluation
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- MCQ: MTA RevisionDocument7 pagesMCQ: MTA RevisionChristina FingtonPas encore d'évaluation
- 06 - Graham Bleakley Part 2Document12 pages06 - Graham Bleakley Part 2rihabPas encore d'évaluation
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- Sampled-Data-Based Adaptive Optimal Control For 2dof HelicopterDocument8 pagesSampled-Data-Based Adaptive Optimal Control For 2dof HelicopterJITENDRA KUMAR GOYAL Research Scholar, Dept. of Electrical Engg., IIT (BHU)Pas encore d'évaluation
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- Synthesis of Political and Organizational TheoriesDocument6 pagesSynthesis of Political and Organizational TheoriesArch Faith Lejarso-SerisolaPas encore d'évaluation
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- A Road Map To Total QualityDocument16 pagesA Road Map To Total QualityM. JokomoPas encore d'évaluation
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- Unit 3Document46 pagesUnit 3Vinod Srinivasan100% (1)
- Proposal SkripsiDocument10 pagesProposal SkripsiTika KomalasariPas encore d'évaluation
- Carnot Engine (Application of The Second Law of Thermodynamics) Problems and SolutionsDocument2 pagesCarnot Engine (Application of The Second Law of Thermodynamics) Problems and SolutionsFUN SCIENCEPas encore d'évaluation
- ECE3009 Neural-Networks-and-Fuzzy-Control ETH 1 AC40 PDFDocument2 pagesECE3009 Neural-Networks-and-Fuzzy-Control ETH 1 AC40 PDFSmruti RanjanPas encore d'évaluation
- Developmental Science, Developmental Systems, and Contemporary Theories of Human DevelopmentDocument17 pagesDevelopmental Science, Developmental Systems, and Contemporary Theories of Human DevelopmentAcklinda LiuPas encore d'évaluation
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- Catalog PDFDocument8 pagesCatalog PDFSyed Kazam RazaPas encore d'évaluation
- UML复习Document14 pagesUML复习xinrui.zhang77Pas encore d'évaluation
- URS TemplateDocument7 pagesURS TemplateMario BonnielsPas encore d'évaluation
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- Department of Mechanical Engineering: Lesson PlanDocument5 pagesDepartment of Mechanical Engineering: Lesson PlansivashanmugamPas encore d'évaluation
- Préparation Au PMP Test Chapitre 5 Et 6Document14 pagesPréparation Au PMP Test Chapitre 5 Et 6bobex bobexPas encore d'évaluation
- Chapter 5 CS DesignDocument42 pagesChapter 5 CS DesignSiferaw NegashPas encore d'évaluation
- History of ManagementDocument19 pagesHistory of ManagementShushank Verma100% (1)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (120)
- Artificial IntelligenceDocument98 pagesArtificial IntelligenceManvendraPas encore d'évaluation
- ECE 353 Introduction To Microprocessor Systems: Week 14Document44 pagesECE 353 Introduction To Microprocessor Systems: Week 14Ahmed El-ShafeiPas encore d'évaluation
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)