Vous aimerez peut-être aussi
- Learning OrganizationDocument104 pagesLearning Organizationanandita28100% (2)
- 354 33 Powerpoint-Slides CH4Document52 pages354 33 Powerpoint-Slides CH4Saravanan JayabalanPas encore d'évaluation
- Principles of Boundary Element MethodDocument28 pagesPrinciples of Boundary Element Methodibrahem84100% (1)
- Electric Submersible Pumps For The Petroleum IndustryDocument20 pagesElectric Submersible Pumps For The Petroleum Industrysouthli100% (1)
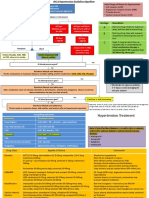
- JNC 8 Guideline Algorithm for Treating HypertensionDocument2 pagesJNC 8 Guideline Algorithm for Treating HypertensionTaradifaNurInsi0% (1)
- Accellos - Guide - V60WebDispatch PDFDocument112 pagesAccellos - Guide - V60WebDispatch PDFcaplusinc100% (1)
- Data Capture Form Environmental ManagementDocument1 pageData Capture Form Environmental ManagementDonavel Nodora JojuicoPas encore d'évaluation
- E F Schumacher - Small Is BeautifulDocument552 pagesE F Schumacher - Small Is BeautifulUlrichmargaritaPas encore d'évaluation
- Artículo - Introduction To Symmetry Methods (P.E. Hydon)Document20 pagesArtículo - Introduction To Symmetry Methods (P.E. Hydon)Pepi MorenoPas encore d'évaluation
- Numerical Solution of ODEs Using Galerkin MethodDocument13 pagesNumerical Solution of ODEs Using Galerkin MethodHaris HoraniPas encore d'évaluation
- Analytical Solutions For A Helmholtz Equation With Dirichlet Boundary Conditions and Arbitrary BoundariesDocument12 pagesAnalytical Solutions For A Helmholtz Equation With Dirichlet Boundary Conditions and Arbitrary BoundarieshusilleroPas encore d'évaluation
- The Approximation of The Maxwell Eigenvalue Problem Using A Least-Squares MethodDocument24 pagesThe Approximation of The Maxwell Eigenvalue Problem Using A Least-Squares MethoddurgaraokamireddyPas encore d'évaluation
- Symmetry For Initial Boundary Value Problems of PdesDocument17 pagesSymmetry For Initial Boundary Value Problems of PdesKarar AL-DahlkiPas encore d'évaluation
- Laur LaurDocument34 pagesLaur LaurAndre LimaPas encore d'évaluation
- Research Notes: Boundary Element Method and Wave EquationDocument4 pagesResearch Notes: Boundary Element Method and Wave EquationKeith DixonPas encore d'évaluation
- Levenberg-Marquardt Methods With Strong Local Convergence Properties For Solving Nonlinear Equations With Convex ConstraintsDocument25 pagesLevenberg-Marquardt Methods With Strong Local Convergence Properties For Solving Nonlinear Equations With Convex ConstraintsCristóbal Alberto Campos MuñozPas encore d'évaluation
- Received 10 April 1997. Read 16 March 1997. Published 30 December 1998.Document18 pagesReceived 10 April 1997. Read 16 March 1997. Published 30 December 1998.Tg WallasPas encore d'évaluation
- Cam S 13 00086Document23 pagesCam S 13 00086Anonymous 1Yc9wYDtPas encore d'évaluation
- 276-Article Text-826-1-10-20230322Document10 pages276-Article Text-826-1-10-20230322shiksmenPas encore d'évaluation
- Positive Numerical Splitting Method For The Hull and White 2D Black-Scholes EquationDocument25 pagesPositive Numerical Splitting Method For The Hull and White 2D Black-Scholes EquationHassan HassanPas encore d'évaluation
- 1 s2.0 S0021999106004414 MainDocument15 pages1 s2.0 S0021999106004414 MainMohammad Yahya AzabPas encore d'évaluation
- Two Parameter Conv-Diff ProblemDocument20 pagesTwo Parameter Conv-Diff ProblemdrscsraoPas encore d'évaluation
- An Analytical Method For Linear Elliptic Pdes and Its Numerical ImplementationDocument19 pagesAn Analytical Method For Linear Elliptic Pdes and Its Numerical Implementationlilasaid2010Pas encore d'évaluation
- Exact analytic solution of the Falkner-Skan equationDocument16 pagesExact analytic solution of the Falkner-Skan equationAnonymous idBsC1Pas encore d'évaluation
- Khodakarami KhajiDocument9 pagesKhodakarami KhajikhodakaramiPas encore d'évaluation
- Lec 3 Fem PDFDocument11 pagesLec 3 Fem PDFAbhishekRajPas encore d'évaluation
- Series Solutions For Laplace'S Equation With Nonhomogeneous Mixed Boundary Conditions and Irregular BoundariesDocument11 pagesSeries Solutions For Laplace'S Equation With Nonhomogeneous Mixed Boundary Conditions and Irregular BoundariesYoyaa WllPas encore d'évaluation
- Trefftz Methods With Cracklets and Their Relation To BEM and MFSDocument26 pagesTrefftz Methods With Cracklets and Their Relation To BEM and MFSOlivier GouveiaPas encore d'évaluation
- Computers and Mathematics With Applications: B. Khatri Ghimire, H.Y. Tian, A.R. LamichhaneDocument13 pagesComputers and Mathematics With Applications: B. Khatri Ghimire, H.Y. Tian, A.R. LamichhaneJerson RodriguezPas encore d'évaluation
- Solving The Laplace S Equation by The FDM and BEM Using Mixed Boundary Conditions PDFDocument6 pagesSolving The Laplace S Equation by The FDM and BEM Using Mixed Boundary Conditions PDFАртемPas encore d'évaluation
- A Fitted Second-Order Difference Scheme On A Modified Shishkin Mesh For A Semilinear Singularly-Perturbed Boundary-Value ProblemDocument10 pagesA Fitted Second-Order Difference Scheme On A Modified Shishkin Mesh For A Semilinear Singularly-Perturbed Boundary-Value ProblemDamir DemirovicPas encore d'évaluation
- Ky FanDocument14 pagesKy FanhungkgPas encore d'évaluation
- Art 066Document6 pagesArt 066israel villarrealPas encore d'évaluation
- Toward The Theory of Semi-Linear Equations: Vladimir Gutlyanski I, Olga Nesmelova, Vladimir RyazanovDocument35 pagesToward The Theory of Semi-Linear Equations: Vladimir Gutlyanski I, Olga Nesmelova, Vladimir Ryazanovhuevonomar05Pas encore d'évaluation
- Doi:10 3934/dcds 2022096Document26 pagesDoi:10 3934/dcds 2022096Mehtar YPas encore d'évaluation
- A Multiscale Finite ElementDocument21 pagesA Multiscale Finite ElementZeljko LazarevicPas encore d'évaluation
- Artigogll PCDocument22 pagesArtigogll PCAnonymous 1Yc9wYDtPas encore d'évaluation
- Measurable conductivities and Clifford analysis approach to Calderón's inverse problemDocument9 pagesMeasurable conductivities and Clifford analysis approach to Calderón's inverse problemNguyễn Lê HuyPas encore d'évaluation
- Extended Meshfree Method for Elastic MediaDocument22 pagesExtended Meshfree Method for Elastic MediatoiyeuhoaPas encore d'évaluation
- The Numerical Solution of Obstacle Problem by Self Adaptive Finite Element MethodDocument10 pagesThe Numerical Solution of Obstacle Problem by Self Adaptive Finite Element MethodSayiqa JabeenPas encore d'évaluation
- Finite Element Method For Numerically Solving PDE'sDocument14 pagesFinite Element Method For Numerically Solving PDE'sThanh DuyPas encore d'évaluation
- F (X) (1 U (X) ) DDocument14 pagesF (X) (1 U (X) ) DCarlos FazPas encore d'évaluation
- Spectral Element Approximation of Fredholm Integral Eigenvalue ProblemsDocument20 pagesSpectral Element Approximation of Fredholm Integral Eigenvalue ProblemsAnonymous 1Yc9wYDtPas encore d'évaluation
- A Collocation Approach For Solving High-Order Linear Fredholm-Volterra Integro-Differential EquationsDocument23 pagesA Collocation Approach For Solving High-Order Linear Fredholm-Volterra Integro-Differential EquationsNguyễn Thái DuyPas encore d'évaluation
- Cluster Expansion For The Ising Model in The Canonical EnsembleDocument33 pagesCluster Expansion For The Ising Model in The Canonical EnsembleSaurabh BasuPas encore d'évaluation
- Goal-Oriented Error Control of The Iterative Solution of Finite Element EquationsDocument31 pagesGoal-Oriented Error Control of The Iterative Solution of Finite Element EquationsOsman HusseinPas encore d'évaluation
- On Some Equivalence Problems For Differential EquationsDocument13 pagesOn Some Equivalence Problems For Differential EquationsPanagiot LoukopoulosPas encore d'évaluation
- Existence and nonexistence of solutions for critical biharmonic equationsDocument25 pagesExistence and nonexistence of solutions for critical biharmonic equationsoscuraPas encore d'évaluation
- Au F, R: 4 Domain Decomposition Techniques 137Document4 pagesAu F, R: 4 Domain Decomposition Techniques 137latinwolfPas encore d'évaluation
- A Note On The Variational Formulation of Pdes and Solution by Finite ElementsDocument7 pagesA Note On The Variational Formulation of Pdes and Solution by Finite ElementsMahmoud samahaPas encore d'évaluation
- Applied MathsDocument8 pagesApplied MathsRex LebanonPas encore d'évaluation
- F Casas A Murua and M Nadinic (Efficient Computation of The Zassenhaus Formula)Document6 pagesF Casas A Murua and M Nadinic (Efficient Computation of The Zassenhaus Formula)Moniqa SalinasPas encore d'évaluation
- ICH heuristicDocument9 pagesICH heuristicdragance107Pas encore d'évaluation
- AssignmentDocument6 pagesAssignmentHamza NaseerPas encore d'évaluation
- Fundamental Concepts To Finite Element FormulationsDocument9 pagesFundamental Concepts To Finite Element FormulationsElga ArsiaPas encore d'évaluation
- Mathematische Zeitschrift: A Category Theoretical Interpretation of Discretization in Galerkin Finite Element MethodDocument15 pagesMathematische Zeitschrift: A Category Theoretical Interpretation of Discretization in Galerkin Finite Element MethodJulieth LaraPas encore d'évaluation
- Derivation of Stiffness and Flexibility For Rods and BeamsDocument9 pagesDerivation of Stiffness and Flexibility For Rods and BeamsNumair Ahmad FarjanPas encore d'évaluation
- Differential Equations ReviewDocument31 pagesDifferential Equations ReviewAnonymous cUjriaHPas encore d'évaluation
- Symmetry: On Eigenfunctions of The Boundary Value Problems For Second Order Differential Equations With InvolutionDocument9 pagesSymmetry: On Eigenfunctions of The Boundary Value Problems For Second Order Differential Equations With InvolutionAbdizhahanPas encore d'évaluation
- Complete Curve For BrachistochroneDocument12 pagesComplete Curve For BrachistochronenuraPas encore d'évaluation
- Solving Electromagnetic Eigenvalue Problems in Polyhedral Domains With Nodal Finite ElementsDocument20 pagesSolving Electromagnetic Eigenvalue Problems in Polyhedral Domains With Nodal Finite ElementsSting Gonsalis100% (1)
- Solving PDEs on Surfaces Using Conformal MappingDocument13 pagesSolving PDEs on Surfaces Using Conformal Mappingdr_s_m_afzali8662Pas encore d'évaluation
- 2014 ElenaDocument20 pages2014 ElenaHaftuPas encore d'évaluation
- Layer Resolving Numerical Scheme For Singularly Perturbed Paraboli - 2023 - MethDocument7 pagesLayer Resolving Numerical Scheme For Singularly Perturbed Paraboli - 2023 - MethMS VictorPas encore d'évaluation
- Galerkin MethodDocument11 pagesGalerkin MethodpouyarostamPas encore d'évaluation
- Engineering Analysis With Boundary Elements: Nasaruddin Salam, Amiruddin Haddade, David L. Clements, Moh. Ivan AzisDocument5 pagesEngineering Analysis With Boundary Elements: Nasaruddin Salam, Amiruddin Haddade, David L. Clements, Moh. Ivan AzisabdmaliknasPas encore d'évaluation
- Difference Equations in Normed Spaces: Stability and OscillationsD'EverandDifference Equations in Normed Spaces: Stability and OscillationsPas encore d'évaluation
- Konsensus HipertiroidDocument6 pagesKonsensus HipertiroidDiethaKusumaningrumPas encore d'évaluation
- Logo WqaDocument1 pageLogo WqadeviantenatorPas encore d'évaluation
- Volcano Risk Communication Through Mutual Understanding and Local WisdomDocument13 pagesVolcano Risk Communication Through Mutual Understanding and Local WisdomdeviantenatorPas encore d'évaluation
- Juni 2016Document4 pagesJuni 2016deviantenatorPas encore d'évaluation
- Volcano Risk Communication Through Mutual Understanding and Local WisdomDocument13 pagesVolcano Risk Communication Through Mutual Understanding and Local WisdomdeviantenatorPas encore d'évaluation
- Intravenous Fluid Therapy in Adults in HospitalDocument36 pagesIntravenous Fluid Therapy in Adults in HospitalMarcelaPuentesPas encore d'évaluation
- Juni 2016Document4 pagesJuni 2016deviantenatorPas encore d'évaluation
- ECG Made Easy PDFDocument78 pagesECG Made Easy PDFJavier SaadPas encore d'évaluation
- Guia de TokioDocument82 pagesGuia de TokioAileenPas encore d'évaluation
- GeotechDocument7 pagesGeotechdeviantenatorPas encore d'évaluation
- A&P Book - Aeronautical Charts and CompassDocument17 pagesA&P Book - Aeronautical Charts and CompassHarry NuryantoPas encore d'évaluation
- INGLESDocument20 pagesINGLESNikollay PeñaPas encore d'évaluation
- CHAPTER II: Review of Related Literature I. Legal ReferencesDocument2 pagesCHAPTER II: Review of Related Literature I. Legal ReferencesChaPas encore d'évaluation
- Cultural Diffusion: Its Process and PatternsDocument16 pagesCultural Diffusion: Its Process and PatternsJessie Yutuc100% (1)
- Controversial Aquatic HarvestingDocument4 pagesControversial Aquatic HarvestingValentina RuidiasPas encore d'évaluation
- Biologicalisation - Biological Transformation in ManufacturingDocument32 pagesBiologicalisation - Biological Transformation in ManufacturingGuillermo AvilesPas encore d'évaluation
- A Report On T&D by IbrahimDocument17 pagesA Report On T&D by IbrahimMohammed IbrahimPas encore d'évaluation
- Wave Hydro Dynamics Prof. V. Sundar Department of Ocean Engineering Indian Institute of Technology, MadrasDocument32 pagesWave Hydro Dynamics Prof. V. Sundar Department of Ocean Engineering Indian Institute of Technology, MadrasMuralidhar YarakalaPas encore d'évaluation
- Shriya Arora: Educational QualificationsDocument2 pagesShriya Arora: Educational QualificationsInderpreet singhPas encore d'évaluation
- Guia de Manejo Sdra 2019Document27 pagesGuia de Manejo Sdra 2019Jorge VidalPas encore d'évaluation
- Lesson Plan-Brainstorming Session For The Group Occupational Report-Jmeck Wfed495c-2 V4a7Document2 pagesLesson Plan-Brainstorming Session For The Group Occupational Report-Jmeck Wfed495c-2 V4a7api-312884329Pas encore d'évaluation
- U.S. Copyright Renewals, 1962 January - June by U.S. Copyright OfficeDocument471 pagesU.S. Copyright Renewals, 1962 January - June by U.S. Copyright OfficeGutenberg.orgPas encore d'évaluation
- Journal of Statistical Planning and Inference: Akanksha S. KashikarDocument12 pagesJournal of Statistical Planning and Inference: Akanksha S. KashikarAkanksha KashikarPas encore d'évaluation
- University of Leicester - Involving Your AudienceDocument4 pagesUniversity of Leicester - Involving Your Audiencevalentina zabalaPas encore d'évaluation
- Learning by LivingDocument5 pagesLearning by LivingPaul SchumannPas encore d'évaluation
- Question 1: Bezier Quadratic Curve Successive Linear Interpolation EquationDocument4 pagesQuestion 1: Bezier Quadratic Curve Successive Linear Interpolation Equationaushad3mPas encore d'évaluation
- Sony Kdl-42w654a rb1g PDFDocument100 pagesSony Kdl-42w654a rb1g PDFMihaela CaciumarciucPas encore d'évaluation
- What Is A Political SubjectDocument7 pagesWhat Is A Political SubjectlukaPas encore d'évaluation
- Lesson Exemplar On Contextualizing Science Lesson Across The Curriculum in Culture-Based Teaching Lubang Elementary School Science 6Document3 pagesLesson Exemplar On Contextualizing Science Lesson Across The Curriculum in Culture-Based Teaching Lubang Elementary School Science 6Leslie SolayaoPas encore d'évaluation
- Disclosure To Promote The Right To InformationDocument22 pagesDisclosure To Promote The Right To InformationPachyiappanPas encore d'évaluation
- Training Program On: Personality Development Program and Workplace SkillsDocument3 pagesTraining Program On: Personality Development Program and Workplace SkillsVikram SinghPas encore d'évaluation
- IEEE TRANSACTIONS ON COMMUNICATIONS, VOL. COM-34, NO. 5 , MAY 1986A BPSK/QPSK Timing-Error DetectorDocument7 pagesIEEE TRANSACTIONS ON COMMUNICATIONS, VOL. COM-34, NO. 5 , MAY 1986A BPSK/QPSK Timing-Error DetectorFahmi MuradPas encore d'évaluation
- David Sosa - The Import of The Puzzle About BeliefDocument31 pagesDavid Sosa - The Import of The Puzzle About BeliefSr. DanieoPas encore d'évaluation