Vous aimerez peut-être aussi
- Multi-Platform Graphics Programming with Kivy: Basic Analytical Programming for 2D, 3D, and Stereoscopic DesignD'EverandMulti-Platform Graphics Programming with Kivy: Basic Analytical Programming for 2D, 3D, and Stereoscopic DesignPas encore d'évaluation
- KHNKJH NCP 30 1Document31 pagesKHNKJH NCP 30 1djsouravPas encore d'évaluation
- DSE Assessment DT TemplateDocument11 pagesDSE Assessment DT TemplateJulien CambonPas encore d'évaluation
- Led ScreenDocument3 pagesLed ScreenselvamejiaPas encore d'évaluation
- SATR-J-6503 - Rev 0 PDFDocument5 pagesSATR-J-6503 - Rev 0 PDFAdel KlkPas encore d'évaluation
- CV - Structural Engineer - Hirenkumar RavalDocument7 pagesCV - Structural Engineer - Hirenkumar RavalHirPas encore d'évaluation
- Method Statement For Workshop Activities RevDocument4 pagesMethod Statement For Workshop Activities RevEmadHassanPas encore d'évaluation
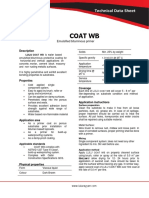
- Data Sheet of Bitumen LuluBitucoat - WBDocument2 pagesData Sheet of Bitumen LuluBitucoat - WBhandhammer qatarPas encore d'évaluation
- APPENDIX 1 Issues For Method Statements in Industrial Roof WorkDocument3 pagesAPPENDIX 1 Issues For Method Statements in Industrial Roof WorkJulianna BakerPas encore d'évaluation
- Work Methodolgy For The Installation of Video-WallDocument17 pagesWork Methodolgy For The Installation of Video-WallDani SalimiPas encore d'évaluation
- Blinding Concrete Works Contents Revised 19-04-16RDocument3 pagesBlinding Concrete Works Contents Revised 19-04-16RJoel Alcantara100% (1)
- Ed 000 CST WMS 0021Document9 pagesEd 000 CST WMS 0021Fitriansyah Adi Putra IrwanPas encore d'évaluation
- Pds Project SetupDocument3 pagesPds Project SetupSRIKANTHPas encore d'évaluation
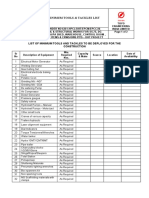
- List of Minimum Tools and Tackles To Be Deployed For The ConstructionDocument2 pagesList of Minimum Tools and Tackles To Be Deployed For The ConstructionRashid Ahmed SiddiquiPas encore d'évaluation
- S5134 Ethernet IO Modules: 8 Channels Universal AI, 8 Channels AO 8 Channels DO, 3channels DIDocument10 pagesS5134 Ethernet IO Modules: 8 Channels Universal AI, 8 Channels AO 8 Channels DO, 3channels DIanaklurah siniPas encore d'évaluation
- 11 - Method of Statement For Stub Angle InstallationDocument10 pages11 - Method of Statement For Stub Angle InstallationiloveumakkahPas encore d'évaluation
- Qcs 2010 Section 21 Part 1 General Provisions For Electrical InstallaDocument15 pagesQcs 2010 Section 21 Part 1 General Provisions For Electrical Installabryanpastor106100% (1)
- Pecc-J-1207 Method Statement For Cable Diversion WorksDocument6 pagesPecc-J-1207 Method Statement For Cable Diversion WorksMuneeswaran BalaguruPas encore d'évaluation
- Scaffold Plan Completeness ChecklistDocument6 pagesScaffold Plan Completeness ChecklistRamil LazaroPas encore d'évaluation
- Tool Box Meeting AttendancesDocument1 pageTool Box Meeting AttendancesPT LD ServisPas encore d'évaluation
- Method Statements 20 % Week 08-09Document10 pagesMethod Statements 20 % Week 08-09Sujani MaarasinghePas encore d'évaluation
- Method Statement - Pouring Foundations-TemplateDocument13 pagesMethod Statement - Pouring Foundations-TemplateUğur BilenPas encore d'évaluation
- Industrial Training Report ModelDocument65 pagesIndustrial Training Report ModelMunaga AdityaPas encore d'évaluation
- Method Statement of Steel Structures (TS TRUSS SDN BHD)Document21 pagesMethod Statement of Steel Structures (TS TRUSS SDN BHD)Calvin OhPas encore d'évaluation
- QCS 2010 Section 3 Part 3 Pits and TrenchesDocument4 pagesQCS 2010 Section 3 Part 3 Pits and Trenchesbryanpastor106Pas encore d'évaluation
- Preliminary Quality Assurance/Quality Control Plan: Mohawk Solar ProjectDocument4 pagesPreliminary Quality Assurance/Quality Control Plan: Mohawk Solar Project无时差Pas encore d'évaluation
- Procedure Installation of Lighting - LABUAN BAJO PDFDocument6 pagesProcedure Installation of Lighting - LABUAN BAJO PDFWika Djoko OPas encore d'évaluation
- WMS Infineon Project Tower ( Lightning Protection System Installation) - Rev-1Document8 pagesWMS Infineon Project Tower ( Lightning Protection System Installation) - Rev-1tanaPas encore d'évaluation
- Rev-2 Method Statement For Building Construction Works Puma Energy Daulatpur ProjectDocument12 pagesRev-2 Method Statement For Building Construction Works Puma Energy Daulatpur ProjectM Waqas HabibPas encore d'évaluation
- MS Working at HeightsDocument15 pagesMS Working at HeightsNauval FadliPas encore d'évaluation
- pdfPlumbingLicenceApplication ShahidDocument2 pagespdfPlumbingLicenceApplication ShahidAKASH shrivastava50% (2)
- National Suppliers - OT Packaging Standard and Goods Delivery Guide v1 ENG PDFDocument56 pagesNational Suppliers - OT Packaging Standard and Goods Delivery Guide v1 ENG PDFOTPPas encore d'évaluation
- Method Statement Striking FormworkDocument3 pagesMethod Statement Striking FormworkSurya HeriwijayaPas encore d'évaluation
- Method StatementDocument4 pagesMethod StatementRichmond SantiagoPas encore d'évaluation
- Form - XXV (See Rule 242 (1) Annual Return of Employer To Be Sent To The Registering OfficerDocument2 pagesForm - XXV (See Rule 242 (1) Annual Return of Employer To Be Sent To The Registering OfficerSHIV SHAKTI PRATAP SINGH100% (2)
- Risk Report-Road ConstructionDocument5 pagesRisk Report-Road ConstructionSyed Yasir Baqar KazmiPas encore d'évaluation
- Ms Working PlatformDocument4 pagesMs Working Platformmohd solihin bin mohd hasan100% (1)
- MST of Road KerbDocument2 pagesMST of Road KerbMital DamaniPas encore d'évaluation
- Work Method Statements For Reed SelectDocument53 pagesWork Method Statements For Reed SelectInoe InaePas encore d'évaluation
- MOS 2x15T EOTC Robotic ShopDocument17 pagesMOS 2x15T EOTC Robotic ShopJohn Rey PerlasPas encore d'évaluation
- SBS ProceduresDocument19 pagesSBS ProceduresH89SAPas encore d'évaluation
- Method Statement ConbextraGPDocument7 pagesMethod Statement ConbextraGPsinambeladavidPas encore d'évaluation
- BCB Solutions Business ProfileDocument9 pagesBCB Solutions Business ProfileJacaranda FM NewsPas encore d'évaluation
- MS-E011-ALF-MS For Installation of LVAC PanelsDocument7 pagesMS-E011-ALF-MS For Installation of LVAC PanelsvipinrajPas encore d'évaluation
- Method Statement For Vertical StructureDocument7 pagesMethod Statement For Vertical StructureAdel SaqqaPas encore d'évaluation
- Diamatic Indstries - CONCRETE CUTTING BLADESDocument4 pagesDiamatic Indstries - CONCRETE CUTTING BLADESDiamatic IndustriesPas encore d'évaluation
- Greater Yangon Water Supply Improvement Project (Phase II) Final Report 4 Feb 2017Document108 pagesGreater Yangon Water Supply Improvement Project (Phase II) Final Report 4 Feb 2017lwin_oo2435Pas encore d'évaluation
- Part E - Proceedings Articles Theme 4 - Mechanical, Manufactuirng and Industrial Engineering - FinalDocument196 pagesPart E - Proceedings Articles Theme 4 - Mechanical, Manufactuirng and Industrial Engineering - FinalCEG BangladeshPas encore d'évaluation
- ### Method of StatementDocument5 pages### Method of StatementTAHER AMMARPas encore d'évaluation
- Method Statement (PAIP 400)Document4 pagesMethod Statement (PAIP 400)Shafiq MustapaPas encore d'évaluation
- General Civil Work Method Statement For RoadsDocument3 pagesGeneral Civil Work Method Statement For RoadsKaram MoatasemPas encore d'évaluation
- 3.7 Method StatementDocument3 pages3.7 Method StatementHenryPas encore d'évaluation
- Installation of GantryDocument3 pagesInstallation of GantryMohd Hafiz Muhamed100% (1)
- J213-AHC-EMD-MS-C-04-R0 MS For Substructure Waterprooing Bitumen CoatDocument7 pagesJ213-AHC-EMD-MS-C-04-R0 MS For Substructure Waterprooing Bitumen CoatKafeel AbbasPas encore d'évaluation
- Forecasting Final Budget and Duration of Highway Construction ProjectsDocument16 pagesForecasting Final Budget and Duration of Highway Construction ProjectsisenefretPas encore d'évaluation
- JSA Road ConstructionDocument17 pagesJSA Road ConstructionMohammad Al Masa'dehPas encore d'évaluation
- Shreyas V Kashyap - Amusement ParkDocument47 pagesShreyas V Kashyap - Amusement ParkShreyas Kash Prince43% (7)
- Applications of Computer GraphicsDocument40 pagesApplications of Computer GraphicsMar AnniPas encore d'évaluation
- Harsh KapilDocument39 pagesHarsh KapilvoriroPas encore d'évaluation
- Sdh-2 Multi-Finger Gripper and Kuka Robot Animations For Real-Time Simulations of Robot-Hand-Control Strategies Using Open Source Software BlenderDocument9 pagesSdh-2 Multi-Finger Gripper and Kuka Robot Animations For Real-Time Simulations of Robot-Hand-Control Strategies Using Open Source Software BlenderGkkPas encore d'évaluation
- Product IdDocument1 pageProduct IdBryan Owen Salcedo SantosPas encore d'évaluation
- Swimming PoolDocument2 pagesSwimming PoolBryan Owen Salcedo SantosPas encore d'évaluation
- Swimming PoolDocument2 pagesSwimming PoolBryan Owen Salcedo SantosPas encore d'évaluation
- PagIbig SLF001 MultiPurposeLoanApplicationForm (MPLAF) 065Document2 pagesPagIbig SLF001 MultiPurposeLoanApplicationForm (MPLAF) 065gosmiley100% (1)
- Open Up The SkyDocument7 pagesOpen Up The SkyBryan Owen Salcedo SantosPas encore d'évaluation
- Band DataDocument1 pageBand DataBryan Owen Salcedo SantosPas encore d'évaluation
- InterviewDocument3 pagesInterviewBryan Owen Salcedo SantosPas encore d'évaluation
- Types of SolidDocument31 pagesTypes of SolidBryan Owen Salcedo SantosPas encore d'évaluation
- Lab ExperimentDocument7 pagesLab ExperimentBryan Owen Salcedo SantosPas encore d'évaluation
- JAW - Canon in DDocument4 pagesJAW - Canon in DHirune YamamotoPas encore d'évaluation
- CodingDocument1 pageCodingBryan Owen Salcedo SantosPas encore d'évaluation
- Jeanne Darc Skill Binding Table 02Document3 pagesJeanne Darc Skill Binding Table 02Bryan Owen Salcedo SantosPas encore d'évaluation
- Chap10 PoweChap10 - Power - Supplies-Student - PPTR Supplies-StudentDocument41 pagesChap10 PoweChap10 - Power - Supplies-Student - PPTR Supplies-StudentBryan Owen Salcedo SantosPas encore d'évaluation
- Pirates and TabsDocument4 pagesPirates and TabsDuyPhạmPas encore d'évaluation
- The Motherboard: A Look at The Brains of The Computer, The Motherboard, and Its Associated ComponentsDocument36 pagesThe Motherboard: A Look at The Brains of The Computer, The Motherboard, and Its Associated ComponentsNuhu MagwaiPas encore d'évaluation
- Chapter 08Document71 pagesChapter 08cjeysPas encore d'évaluation
- SKC Biot-Savart LawDocument28 pagesSKC Biot-Savart LawBryan Owen Salcedo SantosPas encore d'évaluation
- Lesson1 MaterialPropertiesDocument22 pagesLesson1 MaterialPropertiesBryan Owen Salcedo SantosPas encore d'évaluation
- Biot Savart LawDocument7 pagesBiot Savart LawTornadoPas encore d'évaluation
- Kahanga Hanga Songbook PDFDocument43 pagesKahanga Hanga Songbook PDFBryan Owen Salcedo Santos100% (1)
- SCR & ThyristorDocument13 pagesSCR & Thyristorkrlittle4dPas encore d'évaluation
- Biomaterials 1Document21 pagesBiomaterials 1Bryan Owen Salcedo Santos100% (1)
- MT ReportDocument44 pagesMT ReportBryan Owen Salcedo Santos100% (1)
- MatLab Tutorial.Document18 pagesMatLab Tutorial.benyfirstPas encore d'évaluation
- Multisim TutorialDocument9 pagesMultisim TutorialfreepizzaPas encore d'évaluation
- BJT and JFET Frequency ResponseDocument16 pagesBJT and JFET Frequency ResponseVert WheelerPas encore d'évaluation
- BJT Frequency ResponseDocument32 pagesBJT Frequency ResponseBryan Owen Salcedo SantosPas encore d'évaluation
- Lecture Notes in Transmission Media and Antenna Systems: Mapua Institute of Technology School of EeceDocument115 pagesLecture Notes in Transmission Media and Antenna Systems: Mapua Institute of Technology School of EecejobertPas encore d'évaluation
- COMEC513L1 SyllabusDocument2 pagesCOMEC513L1 SyllabusJames Andrew MiñonPas encore d'évaluation
- FreqspecDocument2 pagesFreqspecSachin GhodkePas encore d'évaluation
- Testing and Commissioning Procedure For Earthing System Method StatementDocument2 pagesTesting and Commissioning Procedure For Earthing System Method StatementHumaid ShaikhPas encore d'évaluation
- Ic V88Document2 pagesIc V88gus2890% (1)
- DPU1100 - and DPU1200Document32 pagesDPU1100 - and DPU1200Regis RomaryPas encore d'évaluation
- Tips and Tricks For Building ERP Interfaces in MIIDocument19 pagesTips and Tricks For Building ERP Interfaces in MIInetra14520100% (1)
- Brochure CMU-DELE 03-05-2023 V12Document12 pagesBrochure CMU-DELE 03-05-2023 V12Lucas Fernandes LuzPas encore d'évaluation
- Product Comparison: HP Laserjet Enterprise M605Dn (E6B70A) HP Laserjet Enterprise M806Dn Printer (Cz244A)Document3 pagesProduct Comparison: HP Laserjet Enterprise M605Dn (E6B70A) HP Laserjet Enterprise M806Dn Printer (Cz244A)ANDRES VILLAPas encore d'évaluation
- Comfort Star MPK12-410 BrochureDocument2 pagesComfort Star MPK12-410 Brochuree-ComfortUSAPas encore d'évaluation
- Conduit Installation WMSDocument7 pagesConduit Installation WMSmanohar GurramPas encore d'évaluation
- Retina NetDocument2 pagesRetina Netpra3Pas encore d'évaluation
- Innovation Management Une-Cen Ts 16555-1Document6 pagesInnovation Management Une-Cen Ts 16555-1nasrpooyaPas encore d'évaluation
- Project Management ProcessesDocument36 pagesProject Management ProcessesZainPas encore d'évaluation
- BDLO Labsii Fandii Daandii 224 Bara 2012Document10 pagesBDLO Labsii Fandii Daandii 224 Bara 2012Freesun AbbasPas encore d'évaluation
- Smartdrive Premier System: T E C H N I C A L C A T A L O GDocument52 pagesSmartdrive Premier System: T E C H N I C A L C A T A L O GKrzysztof Bręk100% (1)
- Practice Problem4Document6 pagesPractice Problem4Nathaniel MendozaPas encore d'évaluation
- Azam Enterprises Profile PDFDocument13 pagesAzam Enterprises Profile PDFAryaan RevsPas encore d'évaluation
- Installing The Common Array Manager SoftwareDocument31 pagesInstalling The Common Array Manager SoftwareBruce LeePas encore d'évaluation
- Karapatan NG MamimiliDocument6 pagesKarapatan NG MamimiliTheresa RayneraPas encore d'évaluation
- SAP Configuration TR Transportation DocumentDocument6 pagesSAP Configuration TR Transportation DocumentMahesh GadhariPas encore d'évaluation
- Instrument TransformerDocument8 pagesInstrument TransformerShaip DautiPas encore d'évaluation
- Your Name Here: Career ObjectiveDocument2 pagesYour Name Here: Career ObjectiveShivamPas encore d'évaluation
- 1st CSG University Representation Minutes of The MeetingDocument2 pages1st CSG University Representation Minutes of The MeetingPrincess Kimberly Ubay-ubayPas encore d'évaluation
- 20480A ENU TrainerHandbookDocument627 pages20480A ENU TrainerHandbookMiticuta SurubPas encore d'évaluation
- Cummins Apc110tDocument4 pagesCummins Apc110tAndi AnchaPas encore d'évaluation
- Wa0010Document1 pageWa0010andri yunafrisonPas encore d'évaluation
- 1 Irfan AhmadDocument2 pages1 Irfan AhmadJilani ShaikPas encore d'évaluation
- Courseplan - Building Utilities 2 Electrical Electronic and MechDocument14 pagesCourseplan - Building Utilities 2 Electrical Electronic and MechCatherine Joyce SungaPas encore d'évaluation
- AIA Contract Documents-Design-Build Relationship Diagrams (2014.05)Document6 pagesAIA Contract Documents-Design-Build Relationship Diagrams (2014.05)ed bookerPas encore d'évaluation
- B.tech. III - Electrical Engg 2012-2013Document26 pagesB.tech. III - Electrical Engg 2012-2013SaurabhPas encore d'évaluation
- Reshma DesidiDocument3 pagesReshma Desidiajinkya gunjalPas encore d'évaluation
- Toshiba T1950 T1950CS T1950CT - Maintenance Manual AddendumToshiba T1950 T1950CS T1950CT - Maintenance Manual AddendumDocument18 pagesToshiba T1950 T1950CS T1950CT - Maintenance Manual AddendumToshiba T1950 T1950CS T1950CT - Maintenance Manual Addendumdeath914Pas encore d'évaluation