Vous aimerez peut-être aussi
- Dynamical Systems Method for Solving Nonlinear Operator EquationsD'EverandDynamical Systems Method for Solving Nonlinear Operator EquationsÉvaluation : 5 sur 5 étoiles5/5 (1)
- Iterative Solution of Nonlinear Equations in Several VariablesD'EverandIterative Solution of Nonlinear Equations in Several VariablesPas encore d'évaluation
- Matlab Lmi Lab LMI: Linear Matrix InequalityDocument27 pagesMatlab Lmi Lab LMI: Linear Matrix InequalityAntonio Soto UgaldiPas encore d'évaluation
- Module IV (QB)Document10 pagesModule IV (QB)sudheshPas encore d'évaluation
- Problems Chaptr 1 PDFDocument4 pagesProblems Chaptr 1 PDFcaught inPas encore d'évaluation
- Exercises in Nonlinear Control SystemsDocument99 pagesExercises in Nonlinear Control SystemsSteve DemirelPas encore d'évaluation
- CH 05Document73 pagesCH 05Christina HillPas encore d'évaluation
- Lab 05-Study of Systems Using MATLABDocument7 pagesLab 05-Study of Systems Using MATLABSobia ShakeelPas encore d'évaluation
- Thesis - Robust Control of Power Electronic ConvertersDocument172 pagesThesis - Robust Control of Power Electronic ConvertersDhananjayPas encore d'évaluation
- Nonlinear Control Problem Set1Document3 pagesNonlinear Control Problem Set1tetrixPas encore d'évaluation
- Nonlinear Control, Supplementary Notes To Khalil's Nonlinear Systems - Rafael WisniewskiDocument19 pagesNonlinear Control, Supplementary Notes To Khalil's Nonlinear Systems - Rafael WisniewskiMustafa KösemPas encore d'évaluation
- Modeling A RLC Circuits With Differential EquationsDocument19 pagesModeling A RLC Circuits With Differential EquationsQuarteendolfPas encore d'évaluation
- Signal and System Lab Manual DeepakDocument42 pagesSignal and System Lab Manual DeepakShekhar Suman SoniPas encore d'évaluation
- Linear System Theory and Desing PDFDocument688 pagesLinear System Theory and Desing PDFJose David MartinezPas encore d'évaluation
- Control Principles For Engineered Systems 5SMC0: State Reconstruction & Observer DesignDocument19 pagesControl Principles For Engineered Systems 5SMC0: State Reconstruction & Observer DesignJhonPas encore d'évaluation
- Rosen Gradient Projection MethodDocument7 pagesRosen Gradient Projection MethodSreevatsanadigPas encore d'évaluation
- EC6502-Principal of Digital Signal Processing - 2013 - Regulation PDFDocument13 pagesEC6502-Principal of Digital Signal Processing - 2013 - Regulation PDFSuba Sara SubaPas encore d'évaluation
- Lyapunov StabilityDocument26 pagesLyapunov StabilitySri MathiPas encore d'évaluation
- Duhamel PrincipleDocument2 pagesDuhamel PrincipleArshpreet SinghPas encore d'évaluation
- "Digital Clock": A Lab Project Report OnDocument11 pages"Digital Clock": A Lab Project Report Onabu hureraPas encore d'évaluation
- Trapezoidal RuleDocument10 pagesTrapezoidal RuleRicardo Wan Aguero0% (1)
- Alberty-Matlab Implementation of Fem in ElasticityDocument25 pagesAlberty-Matlab Implementation of Fem in ElasticityRick HunterPas encore d'évaluation
- Sample Solutions For System DynamicsDocument7 pagesSample Solutions For System DynamicsameershamiehPas encore d'évaluation
- Mathematics Integral MCQDocument11 pagesMathematics Integral MCQRaju ShresthaPas encore d'évaluation
- Optimal Control TheoryDocument20 pagesOptimal Control TheoryOmar KePas encore d'évaluation
- DynamicsDocument31 pagesDynamicsNagamani RajeshPas encore d'évaluation
- NPTEL Basics of FEM - I Week 4 SolutionsDocument18 pagesNPTEL Basics of FEM - I Week 4 SolutionsVISMAY KG MechPas encore d'évaluation
- Lab 04Document7 pagesLab 04Sobia ShakeelPas encore d'évaluation
- Binomial Theorem, Exponential & Logarithmic Series-249 PDFDocument8 pagesBinomial Theorem, Exponential & Logarithmic Series-249 PDFSuravi Kusuma PradhanPas encore d'évaluation
- Control Systems Resource SheetDocument12 pagesControl Systems Resource SheetCharlie Ho SiPas encore d'évaluation
- Summary of MATLAB CommandsDocument3 pagesSummary of MATLAB CommandsQuazar001Pas encore d'évaluation
- Topic 5 Transfer Function Approach To Modeling Dynamic SystemsDocument49 pagesTopic 5 Transfer Function Approach To Modeling Dynamic Systemswenfang lee0% (1)
- Lec12 ControlDocument19 pagesLec12 ControlbalkyderPas encore d'évaluation
- On The Sum of The K Largest Eigenvalues of A Symmetric MatrixDocument5 pagesOn The Sum of The K Largest Eigenvalues of A Symmetric MatrixsmashouffPas encore d'évaluation
- Sign FunctionDocument4 pagesSign Functiontrueblue99Pas encore d'évaluation
- An Elementary Treatise On Differential EDocument301 pagesAn Elementary Treatise On Differential EBelia NomePas encore d'évaluation
- Chapter 17 PDFDocument10 pagesChapter 17 PDFChirilicoPas encore d'évaluation
- Qbank VI Sem Complex AnalysisDocument9 pagesQbank VI Sem Complex AnalysisKANTHAVEL TPas encore d'évaluation
- Sadiku Practice Problem Solution PDFDocument177 pagesSadiku Practice Problem Solution PDFIshan Solanki0% (1)
- Matlab Code For Sorted Real Schur FormsDocument20 pagesMatlab Code For Sorted Real Schur FormsOhwil100% (1)
- Part1 20180910.13500.1596979305.4946 PDFDocument94 pagesPart1 20180910.13500.1596979305.4946 PDFpattrapong pongpattraPas encore d'évaluation
- Matrix ExponentialDocument14 pagesMatrix Exponentialvignesh0617Pas encore d'évaluation
- Ordinary Differential EquationsDocument354 pagesOrdinary Differential EquationsguruvashisthaPas encore d'évaluation
- Divergence PDFDocument7 pagesDivergence PDFkarthekeyanmenonPas encore d'évaluation
- Z-Transform: E) KT T (L Z eDocument23 pagesZ-Transform: E) KT T (L Z enenusakPas encore d'évaluation
- Iit-Jam Mathematics Test: Modern Algebra Time: 60 Minutes Date: 08-10-2017 M.M.: 45Document6 pagesIit-Jam Mathematics Test: Modern Algebra Time: 60 Minutes Date: 08-10-2017 M.M.: 45Lappy TopPas encore d'évaluation
- Holy Cross College (Autonomous) Tiruchirappalli - 620 002 Ii B.Sc. Mathematics, Semester - Iv, April 2015 Major Elective 1: Numerical Methods Subject Code: U08MA4MET01Document9 pagesHoly Cross College (Autonomous) Tiruchirappalli - 620 002 Ii B.Sc. Mathematics, Semester - Iv, April 2015 Major Elective 1: Numerical Methods Subject Code: U08MA4MET01RobertBellarmine0% (1)
- Fourier Transform and SeriesDocument2 pagesFourier Transform and SeriesAbhidudePas encore d'évaluation
- Matrices and System of Linear Equations PDFDocument20 pagesMatrices and System of Linear Equations PDFMuhammad IzzuanPas encore d'évaluation
- X X X X Ecx Ecx: Tan - Sec Sec Cot - Cos CosDocument4 pagesX X X X Ecx Ecx: Tan - Sec Sec Cot - Cos Cossharanmit2039Pas encore d'évaluation
- Cs Pole Placement DesignDocument15 pagesCs Pole Placement Design18U208 - ARJUN A100% (1)
- Partial Differential EquationsDocument44 pagesPartial Differential Equationspashish77Pas encore d'évaluation
- SchrodingerDocument56 pagesSchrodingerIka RisnawatiPas encore d'évaluation
- Numerical Optimal Control: July 2011Document123 pagesNumerical Optimal Control: July 2011Santiago Garrido BullónPas encore d'évaluation
- Mal 513Document128 pagesMal 513rahimkamsefidyPas encore d'évaluation
- 1980 - Stable Adaptive Controller Design, Part II - Proof of Stability (Narendra)Document9 pages1980 - Stable Adaptive Controller Design, Part II - Proof of Stability (Narendra)ademargcjuniorPas encore d'évaluation
- Linear FunctionalsDocument7 pagesLinear Functionalshyd arnes100% (1)
- BSC SY Real A II Riemann Integral and Improper IntegralDocument109 pagesBSC SY Real A II Riemann Integral and Improper IntegralSanket Mohare JainPas encore d'évaluation
- Spacecraft Attitude Control: A Linear Matrix Inequality ApproachD'EverandSpacecraft Attitude Control: A Linear Matrix Inequality ApproachPas encore d'évaluation
- Numerical Solutions of Boundary Value Problems for Ordinary Differential EquationsD'EverandNumerical Solutions of Boundary Value Problems for Ordinary Differential EquationsA.K. AzizPas encore d'évaluation
- Control System QBDocument29 pagesControl System QBPrabhavathi AadhiPas encore d'évaluation
- Weather Phenomena MatrixDocument4 pagesWeather Phenomena MatrixsetolazarPas encore d'évaluation
- KSS 41 END enDocument702 pagesKSS 41 END enJavier Del Pozo Garcia100% (1)
- Dario Great Wall of China Lesson PlanDocument3 pagesDario Great Wall of China Lesson Planapi-297914033Pas encore d'évaluation
- Ibt TOEFL Reading-IsuDocument10 pagesIbt TOEFL Reading-IsuShinPas encore d'évaluation
- Elements of Short Story WORKBOOKDocument26 pagesElements of Short Story WORKBOOKDavid Velez Gonzalez100% (2)
- Schopenhauer S LebenDocument345 pagesSchopenhauer S LebenVeRa100% (1)
- HOTS How To Answer QuestionsDocument3 pagesHOTS How To Answer QuestionsEldad KarniPas encore d'évaluation
- Notes PCDocument35 pagesNotes PCSwapnil NanawarePas encore d'évaluation
- Q1. Read The Passage Below and Answer The Questions That FollowDocument3 pagesQ1. Read The Passage Below and Answer The Questions That FollowAryan KananiPas encore d'évaluation
- Expository Essay Rough DraftDocument4 pagesExpository Essay Rough Draftapi-292792461Pas encore d'évaluation
- 09 04 2016-Online-ExamDocument46 pages09 04 2016-Online-ExamAtharva Sheersh PandeyPas encore d'évaluation
- 4th Periodical Test in Math 2022 2023 1Document8 pages4th Periodical Test in Math 2022 2023 1Jasmin Ibarra VillaflorPas encore d'évaluation
- Proj. DocumentationDocument47 pagesProj. DocumentationBrian PaulPas encore d'évaluation
- Semantics Course BookDocument67 pagesSemantics Course BookJosipa Blažević50% (2)
- Data Gathering Advantage and DisadvantageDocument4 pagesData Gathering Advantage and DisadvantageJuan VeronPas encore d'évaluation
- Harrah's Entertainment Inc: Submitted To: Prof. Shubhamoy DeyDocument6 pagesHarrah's Entertainment Inc: Submitted To: Prof. Shubhamoy DeyAbhinav UtkarshPas encore d'évaluation
- Damian C. Brady, P .DDocument9 pagesDamian C. Brady, P .Dapi-27484581Pas encore d'évaluation
- If You Can Keep Your Head When All About YouDocument3 pagesIf You Can Keep Your Head When All About YouxabiersuarezPas encore d'évaluation
- GRADES 1 To 12 Daily Lesson Log Grade 3 Science Quarter 1: I. Objectives Monday Tuesday Wednesday Thursday FridayDocument10 pagesGRADES 1 To 12 Daily Lesson Log Grade 3 Science Quarter 1: I. Objectives Monday Tuesday Wednesday Thursday Fridayblood lustPas encore d'évaluation
- 2010-2011 CatalogDocument339 pages2010-2011 CatalogSimon TabPas encore d'évaluation
- Advertisement and Sponsorship-Price ListDocument4 pagesAdvertisement and Sponsorship-Price ListzulkiplyPas encore d'évaluation
- 01advantage1 ExtraListeningPrac1Document1 page01advantage1 ExtraListeningPrac1nereaPas encore d'évaluation
- German Short Stories For BeginnersDocument82 pagesGerman Short Stories For BeginnersHùynh Ngọc DiễmPas encore d'évaluation
- Rpi CM V1 - 1 Schematic PDFDocument4 pagesRpi CM V1 - 1 Schematic PDFStephen J. RobertsPas encore d'évaluation
- Shell Paper Machine Oil S3 M 220Document3 pagesShell Paper Machine Oil S3 M 220DENNY BAYUAJIPas encore d'évaluation
- The Future of Humanity ProjectDocument9 pagesThe Future of Humanity Projectapi-479088697Pas encore d'évaluation
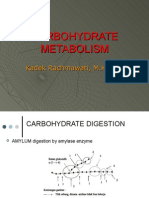
- Carbohydrate MetabolismDocument38 pagesCarbohydrate Metabolismwidya nurrohmanPas encore d'évaluation
- Case MC ColleaguesVsClientsDocument2 pagesCase MC ColleaguesVsClientsSri Harsha50% (2)
- An Overview On Co-Operative Societies in BangladeshDocument11 pagesAn Overview On Co-Operative Societies in BangladeshAlexander DeckerPas encore d'évaluation