Vous aimerez peut-être aussi
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (345)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- TT75 (4WD) PDFDocument286 pagesTT75 (4WD) PDFCENTURYBROTHER100% (2)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
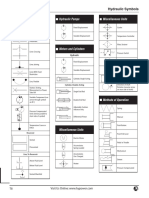
- Fluid Power Symbols PDFDocument4 pagesFluid Power Symbols PDFHeno ArdianPas encore d'évaluation
- Lantec LW Series Winches Catalog PDFDocument16 pagesLantec LW Series Winches Catalog PDFFareedMohmed100% (1)
- Lg958l Training Material 10070Document542 pagesLg958l Training Material 10070Heno Ardian100% (4)
- Paramax GearboxDocument117 pagesParamax GearboxWan ShafiqPas encore d'évaluation
- 01 RT-flex 4 Course A OverviewDocument116 pages01 RT-flex 4 Course A OverviewRachit Sharma100% (2)
- Fiat Palio FIRE 1.3 16V DespieceDocument429 pagesFiat Palio FIRE 1.3 16V DespieceRichard Valera82% (33)
- Din 5480-1Document27 pagesDin 5480-1Emílio BeckerPas encore d'évaluation
- Full Scale Truck Steering-System Modeling and Validation: September 2016Document7 pagesFull Scale Truck Steering-System Modeling and Validation: September 2016Heno ArdianPas encore d'évaluation
- Full Scale Truck Steering-System Modeling and Validation: September 2016Document7 pagesFull Scale Truck Steering-System Modeling and Validation: September 2016Heno ArdianPas encore d'évaluation
- Renault Trucks Distribution Renault Master Panel Van 2017 Uk PDFDocument44 pagesRenault Trucks Distribution Renault Master Panel Van 2017 Uk PDFHeno ArdianPas encore d'évaluation
- D155a 6 Cen00255-07Document16 pagesD155a 6 Cen00255-07fawwaz firdausPas encore d'évaluation
- Corbin Technical Bulletin Volume 4Document149 pagesCorbin Technical Bulletin Volume 4aikidomoysesPas encore d'évaluation
- Planetry GearsDocument10 pagesPlanetry Gearsvinu1175Pas encore d'évaluation
- Kom Lecture NotesDocument163 pagesKom Lecture NotesgvnagamaniPas encore d'évaluation
- Planetary Gear Trains For VehiclesDocument4 pagesPlanetary Gear Trains For VehiclesSiva Srinivas RangavajhalaPas encore d'évaluation
- Brown & SharpeDocument138 pagesBrown & SharpeFabio Andrés CancinoPas encore d'évaluation
- 470 - MCE 504 Automobile Engineering Web Note - DR B O Bolaji PDFDocument73 pages470 - MCE 504 Automobile Engineering Web Note - DR B O Bolaji PDFSanthosh NagarajaPas encore d'évaluation
- MT PDFDocument46 pagesMT PDFGael AlvarezPas encore d'évaluation
- Komatsu Wheel Loaders Wa150pz 5 Shop ManualDocument20 pagesKomatsu Wheel Loaders Wa150pz 5 Shop Manualjoan100% (47)
- WETGFDZSR 27Y英文技术规格书Document28 pagesWETGFDZSR 27Y英文技术规格书RajPas encore d'évaluation
- Basic Calculation - PhysicDocument46 pagesBasic Calculation - PhysicjalbartcPas encore d'évaluation
- Project ReportDocument47 pagesProject ReportAman Kumar SinghPas encore d'évaluation
- CODO UNIVERSAL HartrolDocument15 pagesCODO UNIVERSAL HartrolJohana DelgadoPas encore d'évaluation
- Lecture 5 Shaft Design With SolutionsDocument38 pagesLecture 5 Shaft Design With Solutionsgatoradeqazwsx100% (2)
- Catálogo Equipo Hidráulico BonfiglioliDocument52 pagesCatálogo Equipo Hidráulico BonfiglioliABELARDO PINAPas encore d'évaluation
- Design of Transmission System For Go-KartDocument4 pagesDesign of Transmission System For Go-KartRohitPas encore d'évaluation
- Technical CatalogueDocument313 pagesTechnical Cataloguecorsini999Pas encore d'évaluation
- TERMINOLOGY OF WORM GEARS F AnalaysisDocument6 pagesTERMINOLOGY OF WORM GEARS F AnalaysisdawitPas encore d'évaluation
- Calculation of A Helical Gear Pair: 1. Tooth Geometry and MaterialDocument9 pagesCalculation of A Helical Gear Pair: 1. Tooth Geometry and Materialanush_swaminathanPas encore d'évaluation
- Osm ProductsDocument14 pagesOsm ProductsAthox Qhurien100% (1)
- Coco Yam HarvesterDocument8 pagesCoco Yam HarvesterTANKO BAKOPas encore d'évaluation
- Hardware Implementation and Operation of The SystemDocument11 pagesHardware Implementation and Operation of The SystemWaiwai soePas encore d'évaluation
- 0317 ForgingDocument10 pages0317 ForgingBurak KoyuncuogluPas encore d'évaluation
- Specifications Models 37R116, 37R118 and 43R175: Carry Capacity: 18,200 To 47,200 Lbs (8250 To 21,400 KG.)Document7 pagesSpecifications Models 37R116, 37R118 and 43R175: Carry Capacity: 18,200 To 47,200 Lbs (8250 To 21,400 KG.)Marek WyszatyckiPas encore d'évaluation
- Design and Fabrication of Time Delay Conveyor Using Geneva MechanismDocument40 pagesDesign and Fabrication of Time Delay Conveyor Using Geneva MechanismRamachantran RamachantranPas encore d'évaluation