Vous aimerez peut-être aussi
- Trabajo Colaborativo 1 Grupo 100414 2Document14 pagesTrabajo Colaborativo 1 Grupo 100414 2yudyPas encore d'évaluation
- Trabajo Colaborativo 3 Grupo 100414 2Document21 pagesTrabajo Colaborativo 3 Grupo 100414 2Carlos Andres GutierrezPas encore d'évaluation
- Trabajo Colaborativo 2 Grupo 100414 2Document13 pagesTrabajo Colaborativo 2 Grupo 100414 2yudyPas encore d'évaluation
- Trabajo Colaborativo 2 Grupo 100414 2Document13 pagesTrabajo Colaborativo 2 Grupo 100414 2yudyPas encore d'évaluation
- Trabajo Colaborativo 2 Grupo 100414 2Document13 pagesTrabajo Colaborativo 2 Grupo 100414 2yudyPas encore d'évaluation
- Trabajo Colaborativo1 212020 73Document12 pagesTrabajo Colaborativo1 212020 73yudyPas encore d'évaluation
- Anexo 3 Formato Tarea 2 - FISICA GENERALDocument21 pagesAnexo 3 Formato Tarea 2 - FISICA GENERALyudyPas encore d'évaluation
- Anexo 3 Formato Tarea 2 - FISICA GENERALDocument23 pagesAnexo 3 Formato Tarea 2 - FISICA GENERALyudyPas encore d'évaluation
- Trabajo Colaborativo1 212020 73Document12 pagesTrabajo Colaborativo1 212020 73yudyPas encore d'évaluation
- Algoritmo para calcular tarifa de estacionamientoDocument5 pagesAlgoritmo para calcular tarifa de estacionamientoJuan Huamani100% (2)
- Modelo OSI: Las 7 capas del modelo de referenciaDocument7 pagesModelo OSI: Las 7 capas del modelo de referenciaDavid Paolo Rocha JaureguiPas encore d'évaluation
- Automatas FinitosDocument2 pagesAutomatas FinitosAndrea GuayllasPas encore d'évaluation
- Instructivo Ficha de DocumentaciónDocument11 pagesInstructivo Ficha de DocumentaciónNicoleMarrufoPas encore d'évaluation
- Factura electrónica de servicio de taxi por S/ 596.52Document1 pageFactura electrónica de servicio de taxi por S/ 596.52wilberprado2010Pas encore d'évaluation
- Avance N1 Proyecto IntegradorDocument19 pagesAvance N1 Proyecto IntegradorJhonatan BautistaPas encore d'évaluation
- Impacto de Las Tic en La Contabilidad y FinanzasDocument21 pagesImpacto de Las Tic en La Contabilidad y FinanzasCriss MbPas encore d'évaluation
- 08 MTV LeanDocument23 pages08 MTV LeanCarlosSanchezPas encore d'évaluation
- Anexo N°02 - Plan de Requisitos de Calidad para SubcontratistasDocument2 pagesAnexo N°02 - Plan de Requisitos de Calidad para SubcontratistasJose Guerrero100% (1)
- Modulo II. Gestion Documental y Sistema SenecaDocument15 pagesModulo II. Gestion Documental y Sistema SenecaPaquiPas encore d'évaluation
- Instrucciones Uso Plantilla: Hoja de Ruta para Mini Plan de MarketingDocument21 pagesInstrucciones Uso Plantilla: Hoja de Ruta para Mini Plan de MarketingManuel Orlando Sarmiento VasquezPas encore d'évaluation
- Click4 PDFDocument14 pagesClick4 PDFjuanandres2978Pas encore d'évaluation
- Formato Consolidado Acciones CorrectivasDocument16 pagesFormato Consolidado Acciones CorrectivasauraPas encore d'évaluation
- Aprende Facebook Ads Desde Cero La Gua Definitiva Paso A Paso para Crear Anuncios en Facebook Que Atrapen Clientes y Leads Spanish Edition by Roberto Gamboa b010mnmxtkDocument7 pagesAprende Facebook Ads Desde Cero La Gua Definitiva Paso A Paso para Crear Anuncios en Facebook Que Atrapen Clientes y Leads Spanish Edition by Roberto Gamboa b010mnmxtkKellyCarranza100% (1)
- Funcion Buscarh en ExcelDocument8 pagesFuncion Buscarh en ExcelJohn JuradoPas encore d'évaluation
- CV - Liesly L. Ayala AldaveDocument2 pagesCV - Liesly L. Ayala Aldavelesly ayalaPas encore d'évaluation
- Central de Monitoreo Cic Con 6 Monitores Solar 8000i para NeonatosDocument227 pagesCentral de Monitoreo Cic Con 6 Monitores Solar 8000i para Neonatosbrisa100% (1)
- Cartilla - Copias de Seguridad SiigoDocument7 pagesCartilla - Copias de Seguridad SiigosonniaedPas encore d'évaluation
- 201 Circuitos Neumáticos BásicosDocument5 pages201 Circuitos Neumáticos BásicosOscar RosalesPas encore d'évaluation
- Solicitud de Empleo LlenaDocument3 pagesSolicitud de Empleo LlenaMaycol LozanoPas encore d'évaluation
- Mini ProyectoDocument2 pagesMini ProyectoGénesisPas encore d'évaluation
- QuiñonesDocument108 pagesQuiñonesjuan carlos caituiro huamaniPas encore d'évaluation
- Manual de DansguardianDocument10 pagesManual de DansguardianÁlvarez MarcoPas encore d'évaluation
- Equipo de Cómputo TablaDocument4 pagesEquipo de Cómputo TablaItzel HigaredaPas encore d'évaluation
- Contrato PDFDocument3 pagesContrato PDFJhonDaiviDrakonTiconaRuelasPas encore d'évaluation
- ManualAconcagua PDFDocument5 pagesManualAconcagua PDFyenniferPas encore d'évaluation
- Desarrollo de SistemasDocument45 pagesDesarrollo de SistemasCuenta Personal UniPas encore d'évaluation
- Producto Académico 1Document3 pagesProducto Académico 1Fernando Huamaní VargasPas encore d'évaluation
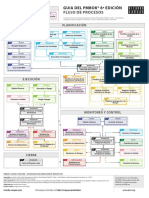
- Ricardo Vargas Simplified Pmbok Flow 6ed Color ES-A3Document1 pageRicardo Vargas Simplified Pmbok Flow 6ed Color ES-A3rmendoza85Pas encore d'évaluation
- Sitio web Colectivo CaronteDocument18 pagesSitio web Colectivo CaronteAlcaldia Victoria0% (2)