Vous aimerez peut-être aussi
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- DTC Troubleshooting: Before You Troubleshoot, Review The General Troubleshooting InformationDocument32 pagesDTC Troubleshooting: Before You Troubleshoot, Review The General Troubleshooting InformationpaniyaPas encore d'évaluation
- American Literature TimelineDocument2 pagesAmerican Literature TimelineJoanna Dandasan100% (1)
- The Role of Historical Cultural Memory in Uzbek Documentary CinemaDocument5 pagesThe Role of Historical Cultural Memory in Uzbek Documentary CinemaResearch ParkPas encore d'évaluation
- ZLT s10 Dialog UsermanualDocument2 pagesZLT s10 Dialog Usermanualpaniya100% (1)
- ST Veronica Giuliani For OFS PresentationDocument7 pagesST Veronica Giuliani For OFS Presentationleo jPas encore d'évaluation
- Zombie Exodus Safe Haven GuideDocument148 pagesZombie Exodus Safe Haven GuidejigglepopperPas encore d'évaluation
- Alnor EBT720 - 721 Data SheetDocument2 pagesAlnor EBT720 - 721 Data SheetpaniyaPas encore d'évaluation
- Brass Low Pressure Ball ValvesDocument1 pageBrass Low Pressure Ball ValvespaniyaPas encore d'évaluation
- Rugged 5-In-1 Environmental MeterDocument1 pageRugged 5-In-1 Environmental MeterpaniyaPas encore d'évaluation
- Service Manual Installation GuideDocument13 pagesService Manual Installation GuidepaniyaPas encore d'évaluation
- Description: Eps System Description - Eps ControlDocument34 pagesDescription: Eps System Description - Eps ControlpaniyaPas encore d'évaluation
- Gree Manual p1Document13 pagesGree Manual p1paniyaPas encore d'évaluation
- Gree Manual p2Document13 pagesGree Manual p2paniyaPas encore d'évaluation
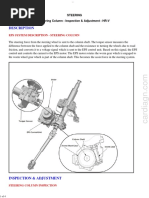
- HR-V Steering Column Inspection ProcedureDocument4 pagesHR-V Steering Column Inspection ProcedurepaniyaPas encore d'évaluation
- Gree Manual p4Document13 pagesGree Manual p4paniyaPas encore d'évaluation
- Removal & Installation: Suspension Tire Pressure Monitoring System - Service Information - HR-VDocument1 pageRemoval & Installation: Suspension Tire Pressure Monitoring System - Service Information - HR-VpaniyaPas encore d'évaluation
- Remove evaporator assy from air conditioner service manualDocument13 pagesRemove evaporator assy from air conditioner service manualpaniyaPas encore d'évaluation
- S-849 - December 2018 Page - 6Document1 pageS-849 - December 2018 Page - 6paniyaPas encore d'évaluation
- Removal & Installation: Steering EPS Motor / Control Unit - Service Information - HR-VDocument2 pagesRemoval & Installation: Steering EPS Motor / Control Unit - Service Information - HR-VpaniyaPas encore d'évaluation
- Torque Specifications (Ka/Kc Models)Document5 pagesTorque Specifications (Ka/Kc Models)paniyaPas encore d'évaluation
- Datenblatt / Data Sheet U51DL-012KK-5Document6 pagesDatenblatt / Data Sheet U51DL-012KK-5paniyaPas encore d'évaluation
- Specification Table: Standards and Service LimitsDocument11 pagesSpecification Table: Standards and Service Limitsvadim vadimPas encore d'évaluation
- Ambu PEEP ValvesDocument2 pagesAmbu PEEP ValvespaniyaPas encore d'évaluation
- S-849 - December 2018 Page - 3Document1 pageS-849 - December 2018 Page - 3paniyaPas encore d'évaluation
- S-849 - December 2018 Page - 5Document1 pageS-849 - December 2018 Page - 5paniyaPas encore d'évaluation
- Frank's Oxygen ConcentratorsDocument1 pageFrank's Oxygen ConcentratorspaniyaPas encore d'évaluation
- Diaphragm Pump - CompressorDocument2 pagesDiaphragm Pump - CompressorpaniyaPas encore d'évaluation
- Datenblatt / Data Sheet U51DL-012KK-5Document6 pagesDatenblatt / Data Sheet U51DL-012KK-5paniyaPas encore d'évaluation
- 18200776-1c15-496d-8e17-9b69d4f11289Document2 pages18200776-1c15-496d-8e17-9b69d4f11289rdbranaweeraPas encore d'évaluation
- Helix Portable Ventilators: Sustainable First Choice FlexibleDocument3 pagesHelix Portable Ventilators: Sustainable First Choice FlexiblepaniyaPas encore d'évaluation
- Ambu PEEP ValvesDocument2 pagesAmbu PEEP ValvespaniyaPas encore d'évaluation
- AUS PEEPValves 493480097 V02 0712Document2 pagesAUS PEEPValves 493480097 V02 0712paniyaPas encore d'évaluation
- 18200776-1c15-496d-8e17-9b69d4f11289Document2 pages18200776-1c15-496d-8e17-9b69d4f11289rdbranaweeraPas encore d'évaluation
- IE PEEPValve 493480001 V03 0413 PDFDocument2 pagesIE PEEPValve 493480001 V03 0413 PDFCoffee ĐenPas encore d'évaluation
- Mobile-Friendly Cooperative WebDocument7 pagesMobile-Friendly Cooperative WebWahyu PPas encore d'évaluation
- Session CommandsDocument1 033 pagesSession Commandshan seongPas encore d'évaluation
- KOREADocument124 pagesKOREAchilla himmudPas encore d'évaluation
- Material Safety Data Sheet: Development Associates, IncDocument3 pagesMaterial Safety Data Sheet: Development Associates, IncDedi MulyadiPas encore d'évaluation
- LSAP 423 Tech Data 25kVA-40KVA - 3PH 400VDocument1 pageLSAP 423 Tech Data 25kVA-40KVA - 3PH 400Vrooies13Pas encore d'évaluation
- 11.trouble Shooting For TMDocument9 pages11.trouble Shooting For TMfrezgi birhanuPas encore d'évaluation
- Dental Management of Patients With HemophiliaDocument5 pagesDental Management of Patients With HemophiliaarjayPas encore d'évaluation
- Bioav 3Document264 pagesBioav 3Sabiruddin Mirza DipuPas encore d'évaluation
- Estimating PSCC for Electrical InstallationsDocument2 pagesEstimating PSCC for Electrical InstallationsgmuitaPas encore d'évaluation
- Thermal Physics KPN MurthyDocument151 pagesThermal Physics KPN MurthyRithish BarathPas encore d'évaluation
- Lect 1.2 Principles of Food Process DesignDocument43 pagesLect 1.2 Principles of Food Process Designmahmoud hassanPas encore d'évaluation
- The Leaders of The NationDocument3 pagesThe Leaders of The NationMark Dave RodriguezPas encore d'évaluation
- MUM202001007 - 300 TR Price BOQ ChillerDocument4 pagesMUM202001007 - 300 TR Price BOQ ChillerB DASPas encore d'évaluation
- Main: Exploded ViewDocument30 pagesMain: Exploded ViewamokssantiagoPas encore d'évaluation
- Ivf Market in IndiaDocument15 pagesIvf Market in IndiaSunil Tak100% (1)
- UNDERSTANDING CULTURE SOCIETY & POLITICS12 - LAS - Week7Document6 pagesUNDERSTANDING CULTURE SOCIETY & POLITICS12 - LAS - Week7Bergonsolutions AingelPas encore d'évaluation
- RRLDocument4 pagesRRLTiltshifter ViPas encore d'évaluation
- BH Tif03Document21 pagesBH Tif03Andres R. OlguinPas encore d'évaluation
- Chapter 1-The Indian Contract Act, 1872, Unit 1-Nature of ContractsDocument10 pagesChapter 1-The Indian Contract Act, 1872, Unit 1-Nature of ContractsALANKRIT TRIPATHIPas encore d'évaluation
- Schedule FinalDocument6 pagesSchedule FinalJamora ManilynPas encore d'évaluation
- Enbrighten Scoring Rubric - Five ScoresDocument1 pageEnbrighten Scoring Rubric - Five Scoresapi-256301743Pas encore d'évaluation
- AESCSF Framework Overview 2020-21Document30 pagesAESCSF Framework Overview 2020-21Sandeep SinghPas encore d'évaluation
- Atomic Structure - One Shot by Sakshi Mam #BounceBackDocument231 pagesAtomic Structure - One Shot by Sakshi Mam #BounceBackchansiray7870Pas encore d'évaluation
- Format For Handout - Comparative Models of EducationDocument5 pagesFormat For Handout - Comparative Models of EducationAdrian AsiPas encore d'évaluation
- PPPoE Packet Format - HCNADocument6 pagesPPPoE Packet Format - HCNARobert Sanchez OchochoquePas encore d'évaluation
- Gardiner 1979Document16 pagesGardiner 1979Oswaldo Manuel Ramirez MarinPas encore d'évaluation