Vous aimerez peut-être aussi
- UNI NAC CALLAO MAESTRÍA TELECOMUNICACIONES TAREA 3 PROCESAMIENTO SEÑALESDocument3 pagesUNI NAC CALLAO MAESTRÍA TELECOMUNICACIONES TAREA 3 PROCESAMIENTO SEÑALESCarlos AndrésPas encore d'évaluation
- Hipotesis para Una MediaDocument3 pagesHipotesis para Una MediaCarlos AndrésPas encore d'évaluation
- FIEEDocument15 pagesFIEECarlos Andrés100% (1)
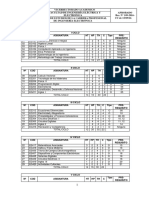
- p15 Malla Curricular de La Carrera Profesional de Ingeniera ElectrnicaDocument5 pagesp15 Malla Curricular de La Carrera Profesional de Ingeniera ElectrnicaJimParedesPas encore d'évaluation
- INF1 - Sist. CONTROL IDocument8 pagesINF1 - Sist. CONTROL ICarlos AndrésPas encore d'évaluation
- Perez de La RiberaDocument5 pagesPerez de La RiberaCarlos AndrésPas encore d'évaluation
- FIEEDocument15 pagesFIEECarlos Andrés100% (1)
- Formato de Trámite Académico PDFDocument1 pageFormato de Trámite Académico PDFCarlos AndrésPas encore d'évaluation
- Sensores y actuadores en motores: Principios y aplicacionesDocument27 pagesSensores y actuadores en motores: Principios y aplicacionesManuel MendozaPas encore d'évaluation
- Cancionero de Misa 1Document1 pageCancionero de Misa 1Carlos Andrés100% (1)
- Sílabo - LA0102 Cálculo IDocument2 pagesSílabo - LA0102 Cálculo IHerber ManzaPas encore d'évaluation
- Ofdm - Canales HuamanDocument10 pagesOfdm - Canales Huamanluis ronald ayasta tejadaPas encore d'évaluation
- 3 Los Músculos PDFDocument25 pages3 Los Músculos PDFruberescritorPas encore d'évaluation
- Inf2 - Control IDocument12 pagesInf2 - Control ICarlos AndrésPas encore d'évaluation
- Tens 1Document4 pagesTens 1Alan MontesdeocaPas encore d'évaluation
- VOLTÍMETRODocument2 pagesVOLTÍMETROCarlos AndrésPas encore d'évaluation
- INF3 - Sist - CONTROL IDocument7 pagesINF3 - Sist - CONTROL ICarlos Andrés100% (1)
- Inf1 - Electrónicos IDocument5 pagesInf1 - Electrónicos ICarlos AndrésPas encore d'évaluation
- Robótica Direccionada PDFDocument60 pagesRobótica Direccionada PDFCarlos AndrésPas encore d'évaluation
- ECG Arduino CardiacoDocument108 pagesECG Arduino CardiacobprzPas encore d'évaluation
- 1° Clase - Ccna Módulo IDocument3 pages1° Clase - Ccna Módulo ICarlos AndrésPas encore d'évaluation
- Inf1 - Electrónicos IDocument5 pagesInf1 - Electrónicos ICarlos AndrésPas encore d'évaluation
- Capitulo 7 - Convert Id Ores DC - AcDocument124 pagesCapitulo 7 - Convert Id Ores DC - AcHector Hugo HerreraPas encore d'évaluation
- ToxicidadDocument19 pagesToxicidadCarlos AndrésPas encore d'évaluation
- claseinvRESON PDFDocument95 pagesclaseinvRESON PDFCarlos AndrésPas encore d'évaluation
- Prob de Error 2Document25 pagesProb de Error 2Jose RiquelmePas encore d'évaluation
- INVERSORESDocument47 pagesINVERSORESguldisPas encore d'évaluation
- Programacion Academica-04!11!2019Document12 pagesProgramacion Academica-04!11!2019Carlos AndrésPas encore d'évaluation
- Ingenieria de SoftwareDocument31 pagesIngenieria de SoftwareCarlos AndrésPas encore d'évaluation
- VOLTÍMETRODocument2 pagesVOLTÍMETROCarlos AndrésPas encore d'évaluation
- Pastel Pink Light Blue Clean UI Web Developer CVDocument9 pagesPastel Pink Light Blue Clean UI Web Developer CVMelany RicaldeePas encore d'évaluation
- Problemas de Examen de Turbomaquinas UssDocument19 pagesProblemas de Examen de Turbomaquinas UssJosé Trujillo GironPas encore d'évaluation
- AM Doble BandaDocument5 pagesAM Doble BandaDaniel EgasPas encore d'évaluation
- Aforo de CaudalesDocument7 pagesAforo de CaudalesDaniel PernaPas encore d'évaluation
- Abreviaturas de Comandos de Autocad en InglesDocument8 pagesAbreviaturas de Comandos de Autocad en InglesJeorge Esrom ChambiPas encore d'évaluation
- Ejemplo de Valorización (Perforación)Document12 pagesEjemplo de Valorización (Perforación)Franco Fernando Moreno MercadoPas encore d'évaluation
- Porcelana Especial para PorcelanatosDocument4 pagesPorcelana Especial para PorcelanatosFranco Vilca SolorzanoPas encore d'évaluation
- Claves Nod32Document3 pagesClaves Nod32jesusPas encore d'évaluation
- Trucos Útiles Al Crear Nuestros Archivos BatchDocument6 pagesTrucos Útiles Al Crear Nuestros Archivos BatchmanumelenasPas encore d'évaluation
- Roca - Del - Drac Leyenda de La Espada de Soler de Vilardell 1 1Document2 pagesRoca - Del - Drac Leyenda de La Espada de Soler de Vilardell 1 1Lorenzo SolerPas encore d'évaluation
- Lista de estudiantes de Hidrología General en la Universidad Nacional de San Cristóbal de Huamanga 2020-1Document9 pagesLista de estudiantes de Hidrología General en la Universidad Nacional de San Cristóbal de Huamanga 2020-1CARLO DANIEL QUISPE VALENZUELAPas encore d'évaluation
- Trabajo Final Jabon DepiladorDocument8 pagesTrabajo Final Jabon DepiladorAnonymous bzABASP0% (1)
- Cursos de AntaminaDocument5 pagesCursos de AntaminaJuan Carlos Callas GarayPas encore d'évaluation
- Resumen ColiseoDocument14 pagesResumen ColiseoEdwin Pedro Lucas RamosPas encore d'évaluation
- Seccion 03Document11 pagesSeccion 03gpro7929Pas encore d'évaluation
- Manual Descalcificador AlhambraDocument16 pagesManual Descalcificador AlhambraAure CorralPas encore d'évaluation
- Proyecto Final (ARI)Document23 pagesProyecto Final (ARI)Aracely PamPas encore d'évaluation
- Presentacion Formaleta Metalica AndescolDocument12 pagesPresentacion Formaleta Metalica Andescolandres_hernandez_30Pas encore d'évaluation
- Memoria Calculo Piping Gasco 2017Document6 pagesMemoria Calculo Piping Gasco 2017German Alexis VillaPas encore d'évaluation
- Cálculo de cantidades de obra para muro perimetral de 100mDocument6 pagesCálculo de cantidades de obra para muro perimetral de 100mNaghely Valeria Jaita BravoPas encore d'évaluation
- Practica 1Document15 pagesPractica 1Alexys RodriguezPas encore d'évaluation
- Deformación cinta polietileno rupturaDocument2 pagesDeformación cinta polietileno rupturajkjmmhfhghfPas encore d'évaluation
- Requisitos de TesisDocument22 pagesRequisitos de TesisGenaro Morales SamayoaPas encore d'évaluation
- Fila 1 Centrifuga j600 Solbat (M)Document14 pagesFila 1 Centrifuga j600 Solbat (M)Teresa Rosas Guzmán67% (3)
- METODO FETKOVICH ecuación presión yacimientos gasDocument3 pagesMETODO FETKOVICH ecuación presión yacimientos gasjose luis pachecoPas encore d'évaluation
- Alcatel Instrucciones PDFDocument30 pagesAlcatel Instrucciones PDFNeoDimioPas encore d'évaluation
- TAREA 4 de TECNOLOGIA Plicada A Los NegociosDocument7 pagesTAREA 4 de TECNOLOGIA Plicada A Los NegociosrichardPas encore d'évaluation
- Manual PolyboardDocument27 pagesManual Polyboardjose orellanaPas encore d'évaluation