Vous aimerez peut-être aussi
- Geomática Tecnologías De Punta: 1ª EdiciónD'EverandGeomática Tecnologías De Punta: 1ª EdiciónÉvaluation : 4 sur 5 étoiles4/5 (3)
- GEODESIA - Texto 1Document50 pagesGEODESIA - Texto 1Carol Luz Chavez Chambilla100% (1)
- Trabajo Topografia GpsDocument10 pagesTrabajo Topografia GpscarlosPas encore d'évaluation
- MONOGRAFIA - Levantamiento TopograficoDocument12 pagesMONOGRAFIA - Levantamiento TopograficobookaroniPas encore d'évaluation
- Apuntes GPSDocument30 pagesApuntes GPSNach Owono NguerePas encore d'évaluation
- Levantamiento Topografico Con GpsDocument4 pagesLevantamiento Topografico Con GpsStefany HerreraPas encore d'évaluation
- Trabajo Con GpsDocument13 pagesTrabajo Con GpsFélix Quispe YucraPas encore d'évaluation
- GPS DiferencialDocument23 pagesGPS DiferencialYuliana Torres100% (1)
- Utilización de Los Dispositivos GPS en TopografíaDocument22 pagesUtilización de Los Dispositivos GPS en TopografíaIvan IslaPas encore d'évaluation
- Que Esgps LeicaDocument63 pagesQue Esgps LeicaMarco Gallardo FuentesPas encore d'évaluation
- GPS DiferencialDocument16 pagesGPS DiferencialRenzo GutierrezPas encore d'évaluation
- Aguilar Gps.Document12 pagesAguilar Gps.Jorge AguilarPas encore d'évaluation
- Inv. Tema 4 Luis Aldair Pérez JiménezDocument29 pagesInv. Tema 4 Luis Aldair Pérez JiménezAldair PJPas encore d'évaluation
- Proyecto SatelitalDocument18 pagesProyecto SatelitalCris Aguilar NPas encore d'évaluation
- ExtensoDocument9 pagesExtensoGerardo Aguilar JuarezPas encore d'évaluation
- Diapositiva GPSDocument14 pagesDiapositiva GPSGpsPas encore d'évaluation
- GPS - Topografia - FinalDocument26 pagesGPS - Topografia - FinalCervando MundacaPas encore d'évaluation
- Informe de La Práctica # 5 GPSDocument6 pagesInforme de La Práctica # 5 GPSJONNATHAN ISRAEL RODAS VELASCOPas encore d'évaluation
- Modulo GpsDocument4 pagesModulo GpsDanny LeónPas encore d'évaluation
- Topografia GpsDocument10 pagesTopografia GpsCleider Santos FloresPas encore d'évaluation
- Practica N 04 TopografiaDocument27 pagesPractica N 04 TopografiaHildemar CabreraPas encore d'évaluation
- TRABAJOCAMPO N°2 Grupo2 240422 114348Document17 pagesTRABAJOCAMPO N°2 Grupo2 240422 114348Piero AxelPas encore d'évaluation
- Tarea 1 Geodesia SatelitalDocument17 pagesTarea 1 Geodesia SatelitalNairovy CidPas encore d'évaluation
- El GPS EnsayoDocument10 pagesEl GPS EnsayoAlexis SolisPas encore d'évaluation
- Go ToDocument32 pagesGo ToBill Céspedes TrinidadPas encore d'évaluation
- Materiales de LaboratorioDocument13 pagesMateriales de LaboratorioAngyPas encore d'évaluation
- Levantamiento Topografico Con GPS Navegador Parque Los ÁlamosDocument15 pagesLevantamiento Topografico Con GPS Navegador Parque Los Álamosedison german ligas nina50% (2)
- TV561G Ti1 G2 24 1Document28 pagesTV561G Ti1 G2 24 1Piero Axel Chalco EstradaPas encore d'évaluation
- Unidad 4 33Document20 pagesUnidad 4 33Daniel Gomez100% (2)
- Posicionamiento GNSSDocument25 pagesPosicionamiento GNSSForpcbogo BogotaPas encore d'évaluation
- Control de Maquinaria Con Tecnologia GpsDocument23 pagesControl de Maquinaria Con Tecnologia GpsGZ Oliver100% (1)
- TRACKLOGDocument7 pagesTRACKLOGPercy Flores DiazPas encore d'évaluation
- Landsat v2Document20 pagesLandsat v2YomiraPas encore d'évaluation
- Informe de CartoDocument16 pagesInforme de CartoAnonymous 7UPqHKPas encore d'évaluation
- Relevamiento Con GpsDocument8 pagesRelevamiento Con GpsSamuelSantosPas encore d'évaluation
- Informe de Gnss FinalDocument22 pagesInforme de Gnss FinalSting J. SC50% (2)
- Informe 10Document11 pagesInforme 10Teresa MuchaPas encore d'évaluation
- Informe GPSDocument18 pagesInforme GPSMauricio H ReyesPas encore d'évaluation
- Tarea Sistemas Embebidos 1Document19 pagesTarea Sistemas Embebidos 1Christian VelazquezPas encore d'évaluation
- Lab 2 - GeoDocument9 pagesLab 2 - GeoAmador J ZegarraPas encore d'évaluation
- Teoría 09. Raro El Sistema GPSDocument8 pagesTeoría 09. Raro El Sistema GPSGerson ArbildoPas encore d'évaluation
- Informe de TopografiaDocument11 pagesInforme de TopografiaRoberto PitaPas encore d'évaluation
- Monografia de TopografiaDocument42 pagesMonografia de TopografiaJosuéApazaPas encore d'évaluation
- Geodesia SatelitalDocument10 pagesGeodesia SatelitalDiana Laura Torres100% (1)
- Evolución Del Sistema GPS: FuncionamientoDocument7 pagesEvolución Del Sistema GPS: FuncionamientoJulian ChaparroPas encore d'évaluation
- IntroducciónDocument13 pagesIntroducciónRuben RivasPas encore d'évaluation
- Practica de Uso Del GPSDocument3 pagesPractica de Uso Del GPSGinaPas encore d'évaluation
- Monografia GpsDocument26 pagesMonografia Gpsangel0% (1)
- Gps Diferencial - DronesDocument7 pagesGps Diferencial - DronesWilliamGayonaGalindoPas encore d'évaluation
- Nociones Basicas Uso GPS ManoDocument136 pagesNociones Basicas Uso GPS ManoCesar Del CastilloPas encore d'évaluation
- Levantamiento GPSDocument13 pagesLevantamiento GPSNancy Solis0% (1)
- Topo Deber 2Document6 pagesTopo Deber 2Maykel GabrielPas encore d'évaluation
- Curso de Manejo de GPS PDFDocument185 pagesCurso de Manejo de GPS PDFUribe Fernando100% (1)
- Gps Diferencial, Procesamiento de Datos y Comparaciòn de ResultadosDocument38 pagesGps Diferencial, Procesamiento de Datos y Comparaciòn de ResultadosVictor Sc NestaresPas encore d'évaluation
- Definición de FotogrametríaDocument13 pagesDefinición de FotogrametríaRonal Rodriguez ICPas encore d'évaluation
- PAS Informe SifredoDocument16 pagesPAS Informe SifredoSifredo Santana HidalgoPas encore d'évaluation
- Informe de Practica N°8Document8 pagesInforme de Practica N°8aliagaruedasilvanaPas encore d'évaluation
- Métodos de trabajo y utilización de aparatos, equipos y útiles topográficos. AGAJ0308D'EverandMétodos de trabajo y utilización de aparatos, equipos y útiles topográficos. AGAJ0308Pas encore d'évaluation
- Laboratorio de Picosatélites de la Universidad Distrital Francisco José de CaldasD'EverandLaboratorio de Picosatélites de la Universidad Distrital Francisco José de CaldasPas encore d'évaluation
- Actividad #02 RDocument2 pagesActividad #02 RLiza Carrion IdmePas encore d'évaluation
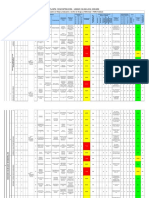
- Iperc Anexo 8 LiDocument2 pagesIperc Anexo 8 LiLiza Carrion IdmePas encore d'évaluation
- Anexo 7Document2 pagesAnexo 7gruponuevageneracionPas encore d'évaluation
- 7 1 IPERC Planta ConcentradoraDocument29 pages7 1 IPERC Planta ConcentradoraWillam Monroy Flores100% (5)
- Resumen de Epp No Trabaje Sin EllosDocument2 pagesResumen de Epp No Trabaje Sin EllosLiza Carrion IdmePas encore d'évaluation
- Iperc Anexo 8Document1 pageIperc Anexo 8Liza Carrion IdmePas encore d'évaluation
- Examen Parcial - Tac-Prof. Ruben EgusquizaDocument2 pagesExamen Parcial - Tac-Prof. Ruben EgusquizaLiza Carrion IdmePas encore d'évaluation
- Examen Final Modulo Nomenclatura LizaDocument2 pagesExamen Final Modulo Nomenclatura LizaLiza Carrion IdmePas encore d'évaluation
- 004-Que Son Actos y Condiciones SubestandarDocument1 page004-Que Son Actos y Condiciones SubestandarRicardo Avalos100% (4)
- Examen Parcial - Tac-Prof. Ruben EgusquizaDocument2 pagesExamen Parcial - Tac-Prof. Ruben EgusquizaLiza Carrion IdmePas encore d'évaluation
- Examen de Conocimiento - Escuela de Negocios - Liza Carrion IdmeDocument2 pagesExamen de Conocimiento - Escuela de Negocios - Liza Carrion IdmeLiza Carrion IdmePas encore d'évaluation
- Actadeconstituciondelproyecto 111109191633 Phpapp01Document14 pagesActadeconstituciondelproyecto 111109191633 Phpapp01Mauro Calahorrano CárdenasPas encore d'évaluation
- Examen de Conocimiento - Escuela de NegociosDocument1 pageExamen de Conocimiento - Escuela de NegociosLiza Carrion IdmePas encore d'évaluation
- Formatos Postulacion 2020Document10 pagesFormatos Postulacion 2020JP ZAVALETAPas encore d'évaluation
- Gestión de ProyectoDocument32 pagesGestión de ProyectoLiza Carrion IdmePas encore d'évaluation
- Seminarios - Inventario y ExistenciaDocument31 pagesSeminarios - Inventario y ExistenciaAzucenaLeyvaVillanuevaPas encore d'évaluation
- Formatos Postulacion 2020Document10 pagesFormatos Postulacion 2020JP ZAVALETAPas encore d'évaluation
- Examen Parcial Modulo NomenclaturaDocument2 pagesExamen Parcial Modulo NomenclaturaLiza Carrion Idme0% (1)
- Cuadro ComparativoDocument2 pagesCuadro ComparativoLiza Carrion IdmePas encore d'évaluation
- Entradas y Salidas de Mercaderia KardexDocument20 pagesEntradas y Salidas de Mercaderia KardexClauDio Condori Villa100% (1)
- Matriz de ComuncacionDocument2 pagesMatriz de ComuncacionLiza Carrion IdmePas encore d'évaluation
- Matriz de ComuncacionDocument2 pagesMatriz de ComuncacionLiza Carrion IdmePas encore d'évaluation
- Cuestionario de Descripción y Análisis de PuestosDocument5 pagesCuestionario de Descripción y Análisis de PuestosElenita Chambilla VillamilPas encore d'évaluation
- Gestión de ProveedoresDocument36 pagesGestión de Proveedoreskatherine valladares100% (3)
- Examen Parcial - Legislacion y Tecnica AduaneraDocument2 pagesExamen Parcial - Legislacion y Tecnica AduaneraLiza Carrion IdmePas encore d'évaluation
- Localizacion de Una Recta Sobre Un PlanoDocument4 pagesLocalizacion de Una Recta Sobre Un PlanoLiza Carrion IdmePas encore d'évaluation
- El Plano Posiciones ParticularesDocument3 pagesEl Plano Posiciones ParticularesLiza Carrion IdmePas encore d'évaluation
- Resúmen de La Historia de La Contabilidad y EmpresaDocument6 pagesResúmen de La Historia de La Contabilidad y EmpresaLiza Carrion IdmePas encore d'évaluation
- Principios de Contabilidad Generalmente AceptadosDocument6 pagesPrincipios de Contabilidad Generalmente AceptadosLiza Carrion IdmePas encore d'évaluation
- El Papel Del Ingeniero Industrial en La ContraloriaDocument3 pagesEl Papel Del Ingeniero Industrial en La ContraloriaLiza Carrion IdmePas encore d'évaluation
- Informe Laboratorio 1 Terminales SatelitalesDocument22 pagesInforme Laboratorio 1 Terminales SatelitalesErick Barrantes QuirósPas encore d'évaluation
- Post Proceso Reporte FotograficoDocument10 pagesPost Proceso Reporte FotograficoLUISPas encore d'évaluation
- Tutorial AntenasDocument11 pagesTutorial AntenasJonathan RiveraPas encore d'évaluation
- CA 91-006 RNP 1 Básica (Español) Final PDFDocument30 pagesCA 91-006 RNP 1 Básica (Español) Final PDFAIRBUS320100% (1)
- S850 Modificado Brochure FinalDocument4 pagesS850 Modificado Brochure Finaliand26Pas encore d'évaluation
- Costos Indirectos PampachacraDocument9 pagesCostos Indirectos Pampachacravictor almeronPas encore d'évaluation
- Planilla de Punto 1 y 2Document4 pagesPlanilla de Punto 1 y 2Noelia RojasPas encore d'évaluation
- La403 Ing Impl Rev 01Document84 pagesLa403 Ing Impl Rev 01Camilo ignacio ValdesPas encore d'évaluation
- GPS Navegacion 2010Document27 pagesGPS Navegacion 2010Mauricio FrancoPas encore d'évaluation
- TV SatelitalDocument28 pagesTV Satelitalrdcp85Pas encore d'évaluation
- Comparacion de SatelitesDocument7 pagesComparacion de SatelitesHoffmann Pardo CadizPas encore d'évaluation
- Hola ForerosDocument58 pagesHola ForerosElvis ReinerioPas encore d'évaluation
- Proyecto GpsDocument86 pagesProyecto GpsFelipe Guajardo PérezPas encore d'évaluation
- Sistema de Comunicación SatelitalDocument36 pagesSistema de Comunicación Satelitaljeong-seo PozoPas encore d'évaluation
- Teledeteccion Clase3Document25 pagesTeledeteccion Clase3Wayra SonqoyPas encore d'évaluation
- Sistema GlonassDocument17 pagesSistema GlonassErich CPPas encore d'évaluation
- Informe de Puntos de Apoyos Con Sistema GNSS en Huaral Mina ColquisiriDocument28 pagesInforme de Puntos de Apoyos Con Sistema GNSS en Huaral Mina ColquisiriAnonymous adQoqAbibPas encore d'évaluation
- Sistemas GNSS y RTKDocument11 pagesSistemas GNSS y RTKMarlon AlvarezPas encore d'évaluation
- InformedegeodesiasantaluciaDocument26 pagesInformedegeodesiasantaluciaYAIR YASEER SANDOVAL GUEVARAPas encore d'évaluation
- Receptor Imu-Rtk Inteligente Y Versátil: Topografía & IngenieríaDocument4 pagesReceptor Imu-Rtk Inteligente Y Versátil: Topografía & IngenieríaMisael M. Mendoza M.Pas encore d'évaluation
- Aeros - Manual Curso GNSS Emlid GrabadoDocument11 pagesAeros - Manual Curso GNSS Emlid GrabadoJUAN JOSE HERNANDEZ GONZALEZPas encore d'évaluation
- Programas GeodésicosDocument10 pagesProgramas Geodésicosronalpc85Pas encore d'évaluation
- GPS FYGB Instalación V1.0.ESPAÑOL NOKIADocument18 pagesGPS FYGB Instalación V1.0.ESPAÑOL NOKIASergio CifuentesPas encore d'évaluation
- Levantamiento GPS ConDocument15 pagesLevantamiento GPS ConAlejandra Katherine Sanchez MezaPas encore d'évaluation
- Spectra SP 60Document4 pagesSpectra SP 60kmilo1029Pas encore d'évaluation
- Eutelsat Satellite E117wb EsDocument2 pagesEutelsat Satellite E117wb EsRolando AvizaPas encore d'évaluation
- Oferta Comercial DTH Mar 2023 PDFDocument13 pagesOferta Comercial DTH Mar 2023 PDFBayron DiazPas encore d'évaluation
- Comunicaciones Satelitales - RFDocument23 pagesComunicaciones Satelitales - RFmfrayssinetPas encore d'évaluation
- Represas 01Document25 pagesRepresas 01JUAN CARLOS GonzalezPas encore d'évaluation
- 11 GPSDocument35 pages11 GPSMiguel Angel Huachaca JeriPas encore d'évaluation