Vous aimerez peut-être aussi
- Review and Comparison of LTCA in Commercial Gear Software - ADF - SMT User Conference - 10 - 21 - 19 PDFDocument23 pagesReview and Comparison of LTCA in Commercial Gear Software - ADF - SMT User Conference - 10 - 21 - 19 PDFAdam FoltzPas encore d'évaluation
- Review and Comparison of LTCA in Commercial Gear Software - ADF - SMT User Conference - 10 - 21 - 19 PDFDocument23 pagesReview and Comparison of LTCA in Commercial Gear Software - ADF - SMT User Conference - 10 - 21 - 19 PDFAdam FoltzPas encore d'évaluation
- Desktop Gear EngineeringDocument5 pagesDesktop Gear EngineeringAdam FoltzPas encore d'évaluation
- LTX CribDocument14 pagesLTX CribVinay KaranamPas encore d'évaluation
- Structural ElementsDocument33 pagesStructural ElementsAdam FoltzPas encore d'évaluation
- Adam D. Foltz: EducationDocument1 pageAdam D. Foltz: EducationAdam FoltzPas encore d'évaluation
- Quiz 4 Solution Key StepsDocument4 pagesQuiz 4 Solution Key StepsAdam FoltzPas encore d'évaluation
- PDFDocument112 pagesPDFstefan.vince536Pas encore d'évaluation
- Bibtex 1988Document16 pagesBibtex 1988DTMPas encore d'évaluation
- Measurement of Gear Stiffness of Healthy and Cracked Spur Gear by Strain Gauge TechniqueDocument8 pagesMeasurement of Gear Stiffness of Healthy and Cracked Spur Gear by Strain Gauge TechniqueAdam FoltzPas encore d'évaluation
- Acoustic pressure ratio analysisDocument4 pagesAcoustic pressure ratio analysisAdam FoltzPas encore d'évaluation
- Plots of Reflection and Transmission Coefficients for Pressure and Intensity WavesDocument4 pagesPlots of Reflection and Transmission Coefficients for Pressure and Intensity WavesAdam FoltzPas encore d'évaluation
- Solid Mechanics Crib SheetDocument27 pagesSolid Mechanics Crib SheetAdam FoltzPas encore d'évaluation
- Solid Mechanics Fall 2010Document10 pagesSolid Mechanics Fall 2010Adam FoltzPas encore d'évaluation
- Machinery Gear Tutorial 7: Create Spur Gear Pair Using 3D ContactDocument10 pagesMachinery Gear Tutorial 7: Create Spur Gear Pair Using 3D ContactAdam FoltzPas encore d'évaluation
- hw2 PlotDocument1 pagehw2 PlotAdam FoltzPas encore d'évaluation
- Dontyne BrochureV5-1 WebDocument24 pagesDontyne BrochureV5-1 WebAdam FoltzPas encore d'évaluation
- Machinery Gear Tutorial 7: Create Spur Gear Pair Using 3D ContactDocument10 pagesMachinery Gear Tutorial 7: Create Spur Gear Pair Using 3D ContactAdam FoltzPas encore d'évaluation
- Gear ForcesDocument7 pagesGear ForcesSahil Kumar100% (1)
- Structural ElementsDocument33 pagesStructural ElementsAdam FoltzPas encore d'évaluation
- Fluid Mechanics Crib SheetDocument4 pagesFluid Mechanics Crib SheetAdam FoltzPas encore d'évaluation
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5783)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (72)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (265)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (119)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Physics Standard Level Paper 1: Instructions To CandidatesDocument13 pagesPhysics Standard Level Paper 1: Instructions To CandidatesjszPas encore d'évaluation
- Infrared Spectroscopy Part 1 and 2 SummaryDocument39 pagesInfrared Spectroscopy Part 1 and 2 SummaryAGCPas encore d'évaluation
- Principles of Screening and Sizing PDFDocument63 pagesPrinciples of Screening and Sizing PDFestramilsolutionPas encore d'évaluation
- Country's Best Online Test PlatformDocument9 pagesCountry's Best Online Test PlatformVardhan BunnuPas encore d'évaluation
- Newtonian Mechanics (Physics Chap 2)Document46 pagesNewtonian Mechanics (Physics Chap 2)anon_815277876Pas encore d'évaluation
- 3 s2.0 B9781416051985000186 MainDocument37 pages3 s2.0 B9781416051985000186 MainLibros LibrosPas encore d'évaluation
- 2010 VJC Physics Prelim H2 P1Document18 pages2010 VJC Physics Prelim H2 P1cjcsucksPas encore d'évaluation
- Orthogonal Collocation For ODEsDocument40 pagesOrthogonal Collocation For ODEsSalethCausilDurango100% (1)
- NSTSE Class 9 SolutionDocument7 pagesNSTSE Class 9 SolutionMota ChashmaPas encore d'évaluation
- Low Cost Compass Systems Using Magnetic SensorsDocument8 pagesLow Cost Compass Systems Using Magnetic Sensorsrokbraihan2Pas encore d'évaluation
- Antenna Radiation Patterns and TypesDocument89 pagesAntenna Radiation Patterns and TypesJohn Brix BalisterosPas encore d'évaluation
- Manual Solution Fundamentals Cosmology RichDocument43 pagesManual Solution Fundamentals Cosmology Richrscaraca100% (1)
- Ilya Prigogine - From Being To Becoming Time and Complexity in The Physical SciencesDocument145 pagesIlya Prigogine - From Being To Becoming Time and Complexity in The Physical SciencesMónica Ramírez100% (2)
- 06 - Kinematics PDFDocument60 pages06 - Kinematics PDFFiriz FarizPas encore d'évaluation
- X Ray CircuitsDocument9 pagesX Ray CircuitsNguyen Duc DungPas encore d'évaluation
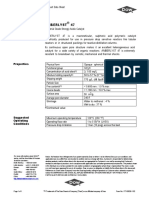
- Amberlyst® 47: For More Information About DOW™ Resins, Call The Dow Water & Process Solutions BusinessDocument1 pageAmberlyst® 47: For More Information About DOW™ Resins, Call The Dow Water & Process Solutions BusinessjorgePas encore d'évaluation
- SCH 200 Atomic Structure and Chemical BondingDocument88 pagesSCH 200 Atomic Structure and Chemical BondingJohn Wanyoike Makau100% (4)
- Physical Science Timeline of Atomic Models July 202020 1Document33 pagesPhysical Science Timeline of Atomic Models July 202020 1Policarpio R Princess LynPas encore d'évaluation
- Units of MeassurementDocument98 pagesUnits of MeassurementRichmond AlcalaPas encore d'évaluation
- Curvature CorrectionDocument7 pagesCurvature CorrectionE J SPas encore d'évaluation
- Hydraulic Directional Control Valves GuideDocument71 pagesHydraulic Directional Control Valves Guidenoid1nl8264Pas encore d'évaluation
- APSC 100 Module 2 Lab 6 - Chemical EngineeringDocument11 pagesAPSC 100 Module 2 Lab 6 - Chemical EngineeringIan IpPas encore d'évaluation
- EMSE 201 - Introduction To Materials Science and EngineeringDocument3 pagesEMSE 201 - Introduction To Materials Science and EngineeringblessingjohnPas encore d'évaluation
- CBSE Class 12 Maths Question Paper Solution 2020 Set 65-1-1Document12 pagesCBSE Class 12 Maths Question Paper Solution 2020 Set 65-1-1SA EED100% (1)
- Ch9 Yr11 Trigonometric FunctionsDocument68 pagesCh9 Yr11 Trigonometric FunctionsLuoPas encore d'évaluation
- First Periodical ExamDocument1 pageFirst Periodical ExamMarissel LimPas encore d'évaluation
- M1 Prep Booklet GuideDocument11 pagesM1 Prep Booklet GuideRadu PopescuPas encore d'évaluation
- Gauss Lab 03Document2 pagesGauss Lab 03Diego Giraldo BoteroPas encore d'évaluation
- Periodic TableDocument17 pagesPeriodic TableTata mobimbaPas encore d'évaluation
- Chemistry MQPDocument61 pagesChemistry MQPShyam Prasad K SPas encore d'évaluation