Vous aimerez peut-être aussi
- Anderson Plata 39Document16 pagesAnderson Plata 39Anderson PlataPas encore d'évaluation
- Anderson Plata 37Document7 pagesAnderson Plata 37Anderson PlataPas encore d'évaluation
- Anderson Plata 39Document9 pagesAnderson Plata 39Anderson PlataPas encore d'évaluation
- Anderson Plata 28Document7 pagesAnderson Plata 28Anderson PlataPas encore d'évaluation
- E1 - Anderson Plata PDFDocument4 pagesE1 - Anderson Plata PDFAnderson PlataPas encore d'évaluation
- Problema1 Anderson PlataDocument3 pagesProblema1 Anderson PlataAnderson PlataPas encore d'évaluation
- Problema3 Anderson PlataDocument2 pagesProblema3 Anderson PlataAnderson PlataPas encore d'évaluation
- Problema2 Anderson PlataDocument3 pagesProblema2 Anderson PlataAnderson PlataPas encore d'évaluation
- Anderson Plata 37Document7 pagesAnderson Plata 37Anderson PlataPas encore d'évaluation
- Anderson Plata 28Document10 pagesAnderson Plata 28Anderson PlataPas encore d'évaluation
- E1 Anderson PlataDocument4 pagesE1 Anderson PlataAnderson PlataPas encore d'évaluation
- Grupo 32Document9 pagesGrupo 32Anderson PlataPas encore d'évaluation
- Problema3 Anderson PlataDocument3 pagesProblema3 Anderson PlataAnderson PlataPas encore d'évaluation
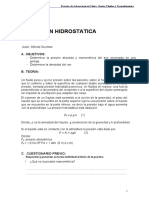
- Presión Hidrostática: Determinación de la Presión del Aire y Densidad del RonDocument7 pagesPresión Hidrostática: Determinación de la Presión del Aire y Densidad del RonSam JimenezPas encore d'évaluation
- Fuerzas en fluidos ESODocument37 pagesFuerzas en fluidos ESOprofesorjalil100% (1)
- Inducción Electromagnética para Quinto Grado de SecundariaDocument5 pagesInducción Electromagnética para Quinto Grado de SecundariaLalisa gatito de AniPas encore d'évaluation
- Problemas 2° ParcialDocument14 pagesProblemas 2° ParcialAxel León Gutiérrez DíazPas encore d'évaluation
- Prediccion Del TiempoDocument3 pagesPrediccion Del Tiempojalepa_esPas encore d'évaluation
- Cinética 2Document5 pagesCinética 2Vida Chunga DelacruzPas encore d'évaluation
- Oscilaciones Fisica IIDocument7 pagesOscilaciones Fisica IIMicaela Vargas CondePas encore d'évaluation
- MF-PropiedadesFluidosDocument157 pagesMF-PropiedadesFluidosLenin SmithPas encore d'évaluation
- Conceptos Básicos RefrigeraciónDocument5 pagesConceptos Básicos RefrigeraciónXavier Jaimes100% (5)
- El Origen de La Palabra EntalpiaDocument1 pageEl Origen de La Palabra EntalpiaJessica PaolaPas encore d'évaluation
- Apuntes de Quimica 5Document38 pagesApuntes de Quimica 5Carlos Coba0% (1)
- CALCULO DE FALLAS IEEE STD - 141 - Pdfslide - Tips - Calculo-De-Fallas-Ieee-Std-141 PDFDocument74 pagesCALCULO DE FALLAS IEEE STD - 141 - Pdfslide - Tips - Calculo-De-Fallas-Ieee-Std-141 PDFChristian CappilloPas encore d'évaluation
- para Cálculo I y IIDocument234 pagespara Cálculo I y IIlizard1985Pas encore d'évaluation
- Factores de Integracion y OtrosDocument10 pagesFactores de Integracion y OtrosDiego MandonPas encore d'évaluation
- Unidad 3. Enlaces QuimicosDocument9 pagesUnidad 3. Enlaces QuimicosCharles Zepeda100% (2)
- Dispersiones, Osmósis y DifusiónDocument14 pagesDispersiones, Osmósis y DifusiónAngela BastidasPas encore d'évaluation
- LA ENERGÍA Ficha de Comprensión LectoraDocument3 pagesLA ENERGÍA Ficha de Comprensión LectoraJhonnyIpacor0% (1)
- (CORTE DIRECTO) Informe Final (1) 1Document23 pages(CORTE DIRECTO) Informe Final (1) 1ronald huancachoque ariasPas encore d'évaluation
- Examen Bimestral de Fisica Cuarto Año de SecundariaDocument2 pagesExamen Bimestral de Fisica Cuarto Año de SecundariaKennedy FloresPas encore d'évaluation
- Recuperacion Fisica 11Document1 pageRecuperacion Fisica 11carlos300106Pas encore d'évaluation
- Carga y Descarga de Un Circuito RCDocument4 pagesCarga y Descarga de Un Circuito RCDeyvi Jhovany Malpaso NiñoPas encore d'évaluation
- Bloque 3Document42 pagesBloque 3Wilmer HuangaPas encore d'évaluation
- Diseño de reactores I: ESTEQUIOMETRIA-1Document17 pagesDiseño de reactores I: ESTEQUIOMETRIA-1J.s. CobarrubiasPas encore d'évaluation
- Dinamica EstructuralDocument23 pagesDinamica EstructuralShabell ChoiPas encore d'évaluation
- Cinemática y dinámica de partículas: Velocidad y aceleraciónDocument66 pagesCinemática y dinámica de partículas: Velocidad y aceleraciónDAVID ISAIAS ZITLE ARROYOPas encore d'évaluation
- Prueba Razonamiento Conceptos Fisicas Ii PDFDocument12 pagesPrueba Razonamiento Conceptos Fisicas Ii PDFPablo RestrepoPas encore d'évaluation
- Etapa de Potencia y FiltradoDocument23 pagesEtapa de Potencia y FiltradoJheider Quintero100% (3)
- Física: Analizamos Los Efectos Del CalorDocument5 pagesFísica: Analizamos Los Efectos Del CalorSEBASTIAN RODRIGO CHAVEZ RAMOSPas encore d'évaluation
- Sistemas 3F Balanceados y DesbalanceadosDocument50 pagesSistemas 3F Balanceados y DesbalanceadosMiluj RodriguezPas encore d'évaluation
- Propiedades de Los Gases, Guía de AprendizajeDocument4 pagesPropiedades de Los Gases, Guía de AprendizajeBeatriz ArancibiaPas encore d'évaluation