Vous aimerez peut-être aussi
- Gaisano CapitalDocument5 pagesGaisano CapitalMags Morten Rosales MalatambanPas encore d'évaluation
- Purity QuizDocument23 pagesPurity QuizMags Morten Rosales MalatambanPas encore d'évaluation
- Post-Construction BMP PhotographsDocument11 pagesPost-Construction BMP PhotographsAlphaPas encore d'évaluation
- CBR ValueDocument39 pagesCBR ValuemalumiusPas encore d'évaluation
- Geotechnical Engineering LECTURE NOTESDocument65 pagesGeotechnical Engineering LECTURE NOTESmoizm5350% (2)
- Trasnportation Engineering in Small CitiesDocument6 pagesTrasnportation Engineering in Small CitiesMags Morten Rosales MalatambanPas encore d'évaluation
- In Each Cycle of The Liturgical CalendarDocument3 pagesIn Each Cycle of The Liturgical CalendarMags Morten Rosales MalatambanPas encore d'évaluation
- Road Construction EstimateDocument306 pagesRoad Construction EstimateRJ SisonPas encore d'évaluation
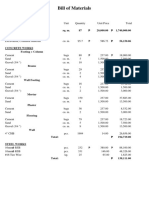
- Bills of MaterialsDocument3 pagesBills of MaterialsMags Morten Rosales MalatambanPas encore d'évaluation
- Abu Sayyaf: MindanaoDocument14 pagesAbu Sayyaf: MindanaoMags Morten Rosales Malatamban100% (1)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (120)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Website Who We Are: A.C.I. - Agency of Cooperation and Investment of Medellin and The Metropolitan AreaDocument19 pagesWebsite Who We Are: A.C.I. - Agency of Cooperation and Investment of Medellin and The Metropolitan AreaACI Medellín (Inversión y Cooperación)Pas encore d'évaluation
- EM681 Thesis E EastlackDocument59 pagesEM681 Thesis E EastlackndlongndPas encore d'évaluation
- ISYS2110 - Case 8.1 - G6 - Team 1Document6 pagesISYS2110 - Case 8.1 - G6 - Team 1Moonie090% (1)
- Codes ObdDocument38 pagesCodes ObdJany OliveroPas encore d'évaluation
- 005 - OBA-QAC-MST-DIS-REV - R00 - Dismantling WorksDocument11 pages005 - OBA-QAC-MST-DIS-REV - R00 - Dismantling WorksDritan PeshtaniPas encore d'évaluation
- Master (Unlimited) Orals Report - 2023-11 - Frood - PassDocument5 pagesMaster (Unlimited) Orals Report - 2023-11 - Frood - PassAnish MohandasPas encore d'évaluation
- EstimateDocument2 pagesEstimateMansi GuptaPas encore d'évaluation
- Rainer Wenty, Plasser & TheurerDocument8 pagesRainer Wenty, Plasser & Theurerbalaji817150Pas encore d'évaluation
- Asm Iss03 R01 18nov22 EngDocument424 pagesAsm Iss03 R01 18nov22 EngAnh NguyenPas encore d'évaluation
- DPH Elring CrossDocument87 pagesDPH Elring Crossj_hernandez_chPas encore d'évaluation
- Chapter 5-Traffic Loading & VolumeDocument19 pagesChapter 5-Traffic Loading & VolumenatiPas encore d'évaluation
- Railway Electrification (Pink Book 2019-2020)Document9 pagesRailway Electrification (Pink Book 2019-2020)Muhammad Meraj AlamPas encore d'évaluation
- 90m OPVDocument2 pages90m OPVvympel1274Pas encore d'évaluation
- Triumph Service Bulletin 1954Document98 pagesTriumph Service Bulletin 1954tr_freundePas encore d'évaluation
- Hotel Industry in India MBP Raw DataDocument7 pagesHotel Industry in India MBP Raw DataRaghavendra GowdaPas encore d'évaluation
- International Trade Compliance: Paris, ESGCI - 4SCM - Feb.8 2021Document48 pagesInternational Trade Compliance: Paris, ESGCI - 4SCM - Feb.8 2021Amine loubabPas encore d'évaluation
- 01.VD01 IND Informasi UmumDocument108 pages01.VD01 IND Informasi UmumBPP Jember ServicePas encore d'évaluation
- Yangshan Port Project ManagementDocument34 pagesYangshan Port Project ManagementChiranjibi Mohanty100% (1)
- Tad740-1032-1630-1631 & TWD740-1210-1232-1630Document68 pagesTad740-1032-1630-1631 & TWD740-1210-1232-1630Rath Asypaden100% (1)
- Engine ControllerGEV228gej - 7026 PDFDocument52 pagesEngine ControllerGEV228gej - 7026 PDFAbelardo Aguilar100% (1)
- Detailed GuideDocument3 pagesDetailed GuideMat JonesPas encore d'évaluation
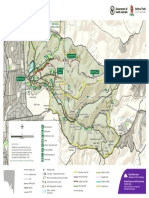
- Belair National Park Map PDFDocument1 pageBelair National Park Map PDFRhys WilliamsPas encore d'évaluation
- Mechanical EngineeringDocument42 pagesMechanical EngineeringNagendra NaiduPas encore d'évaluation
- Motor Vehicles Act, 1988 PDFDocument15 pagesMotor Vehicles Act, 1988 PDFDhwanit RathorePas encore d'évaluation
- Grumman AA-5B 1977-79 POH SearchableDocument192 pagesGrumman AA-5B 1977-79 POH Searchablesplyn100% (1)
- Applied Thermodynamics - STEAM ENGINEDocument16 pagesApplied Thermodynamics - STEAM ENGINEAbhishek BalunavarPas encore d'évaluation
- LED Lighting Distribution Types: Quick Reference Guide Type IDocument2 pagesLED Lighting Distribution Types: Quick Reference Guide Type IwsilvacPas encore d'évaluation
- 14 CFR Part 1Document15 pages14 CFR Part 1AngeloRofelTabundaNavaPas encore d'évaluation
- : Πινακασ Δρομολογιων Πορθμειου Διαδρομη Λιμενασ - Κεραμωτη (Ferry Boat)Document2 pages: Πινακασ Δρομολογιων Πορθμειου Διαδρομη Λιμενασ - Κεραμωτη (Ferry Boat)Adrianna LenaPas encore d'évaluation
- LPC1768 Board SchematicDocument1 pageLPC1768 Board Schematicshindo216100% (1)