Vous aimerez peut-être aussi
- Multicore Software Development Techniques: Applications, Tips, and TricksD'EverandMulticore Software Development Techniques: Applications, Tips, and TricksÉvaluation : 2.5 sur 5 étoiles2.5/5 (2)
- Pyrolysis of Textile WastesDocument7 pagesPyrolysis of Textile WastesTomas PessoaPas encore d'évaluation
- SMB Soil DriverDocument4 pagesSMB Soil Driverpedro chavezPas encore d'évaluation
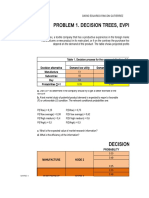
- Problema 1Document3 pagesProblema 1fabimanel100% (1)
- Problem 2.2: AnswerDocument3 pagesProblem 2.2: AnswerAgus Fatulloh Cayla100% (2)
- Phase 3 - Troubleshoot and Analyze Situations Raised in The Evaluation of The Unit 1 - Presentation of The ActivityDocument4 pagesPhase 3 - Troubleshoot and Analyze Situations Raised in The Evaluation of The Unit 1 - Presentation of The ActivityRonal Martinez100% (1)
- Evaluación 1Document13 pagesEvaluación 1ricardo fernandezPas encore d'évaluation
- Task 2 - Jonathan OrtizDocument5 pagesTask 2 - Jonathan OrtizServi Tec Net100% (1)
- Final Activity Step 5 Group 203058 63Document22 pagesFinal Activity Step 5 Group 203058 63Sebastian Cantor100% (1)
- Task 3-Eder - CastañedaDocument12 pagesTask 3-Eder - CastañedaEver Castañeda100% (1)
- Quiz 2 - Negociación y Valoración Tecnologica.Document2 pagesQuiz 2 - Negociación y Valoración Tecnologica.Charles Navarro100% (1)
- Fase 7 - Evaluación 3Document10 pagesFase 7 - Evaluación 3miriambolaPas encore d'évaluation
- Assiginment 7. Cèsar RodriguezDocument7 pagesAssiginment 7. Cèsar RodriguezCésar RodríguezPas encore d'évaluation
- Task 2 - SergioMurciaDocument14 pagesTask 2 - SergioMurciaServi Tec NetPas encore d'évaluation
- Post Task - Final Activity Individual WorkDocument18 pagesPost Task - Final Activity Individual WorkMIGUEL ANGEL AHUMADAPas encore d'évaluation
- Fase 3 - 228001 - 23Document25 pagesFase 3 - 228001 - 23Gustavo HernandezPas encore d'évaluation
- Ingles 0 Actividad 4Document14 pagesIngles 0 Actividad 4JG Sanchez100% (4)
- Tarea 3-Ejercicios 1,2,3,4,5 y 6Document38 pagesTarea 3-Ejercicios 1,2,3,4,5 y 6JUAN DAVID FLOREZ QUINTEROPas encore d'évaluation
- Task 2-Fabian CardonaDocument11 pagesTask 2-Fabian Cardonarobert santiago collazos bonillaPas encore d'évaluation
- Task 3 - Solving Problems of Optimization Models Under UncertaintiesDocument41 pagesTask 3 - Solving Problems of Optimization Models Under UncertaintiesJesus Fabian ArenasPas encore d'évaluation
- Step 4Document12 pagesStep 4Deivy VanegasPas encore d'évaluation
- Act 4 Unidad Uno QuizDocument28 pagesAct 4 Unidad Uno QuizJUANPas encore d'évaluation
- VNT - Step 4 - Grupo 212032 - 44Document13 pagesVNT - Step 4 - Grupo 212032 - 44Diana GonzálezPas encore d'évaluation
- Task 4 Speaking Task Forum and Practice SessionDocument9 pagesTask 4 Speaking Task Forum and Practice SessionRamon Hernan Bacca PiconPas encore d'évaluation
- Teoria de Las DecisionesDocument29 pagesTeoria de Las DecisionesDario E. Rincon100% (1)
- 5.4.1.2 Packet Tracer - Skills Integration Challenge Instructions IG PDFDocument10 pages5.4.1.2 Packet Tracer - Skills Integration Challenge Instructions IG PDFblado1Pas encore d'évaluation
- Teoria Electromagnetica y Ondas - Step 1Document5 pagesTeoria Electromagnetica y Ondas - Step 1Arturo CadenaPas encore d'évaluation
- Resistive Circuits ExperimentDocument4 pagesResistive Circuits ExperimentJohn Achilles RicafrentePas encore d'évaluation
- Post Task - Jefferson FajardoDocument16 pagesPost Task - Jefferson FajardoJosdiaAlvarbelaezPas encore d'évaluation
- Chapter - 5 Multiprocessors and Thread-Level Parallelism: A Taxonomy of Parallel ArchitecturesDocument41 pagesChapter - 5 Multiprocessors and Thread-Level Parallelism: A Taxonomy of Parallel ArchitecturesraghvendrmPas encore d'évaluation
- What Is Parallel ComputingDocument9 pagesWhat Is Parallel ComputingLaura DavisPas encore d'évaluation
- Multi-Core Processors: Page 1 of 25Document25 pagesMulti-Core Processors: Page 1 of 25nnPas encore d'évaluation
- Part - B Unit - 5 Multiprocessors and Thread - Level ParallelismDocument20 pagesPart - B Unit - 5 Multiprocessors and Thread - Level ParallelismAbdul RehmanPas encore d'évaluation
- 02 - Lecture - Part1-Flynns TaxonomyDocument21 pages02 - Lecture - Part1-Flynns TaxonomyAhmedPas encore d'évaluation
- Unit-3 2 Multiprocessor SystemsDocument12 pagesUnit-3 2 Multiprocessor SystemsmirdanishmajeedPas encore d'évaluation
- Parallel Processors and Cluster Systems: Gagan Bansal IME SahibabadDocument15 pagesParallel Processors and Cluster Systems: Gagan Bansal IME SahibabadGagan BansalPas encore d'évaluation
- Disclaimer: - in Preparation of These Slides, Materials Have Been Taken FromDocument33 pagesDisclaimer: - in Preparation of These Slides, Materials Have Been Taken FromZara ShabirPas encore d'évaluation
- Multi Processors and Thread Level ParallelismDocument74 pagesMulti Processors and Thread Level ParallelismPrajna S BhatPas encore d'évaluation
- ACA Assignment 4Document16 pagesACA Assignment 4shresth choudharyPas encore d'évaluation
- First Reference On Cahc CoherencyDocument13 pagesFirst Reference On Cahc CoherencyunPas encore d'évaluation
- B.tech CS S8 High Performance Computing Module Notes Module 4Document33 pagesB.tech CS S8 High Performance Computing Module Notes Module 4Jisha ShajiPas encore d'évaluation
- Multi-Processor / Parallel ProcessingDocument12 pagesMulti-Processor / Parallel ProcessingRoy DhruboPas encore d'évaluation
- Dsa ExamDocument22 pagesDsa ExamcryhaarishPas encore d'évaluation
- Parallel Processing:: Multiple Processor OrganizationDocument24 pagesParallel Processing:: Multiple Processor OrganizationKrishnaPas encore d'évaluation
- COA AssignmentDocument21 pagesCOA Assignment3d nat natiPas encore d'évaluation
- Multiprocessors: COMP 211 - Computer Systems Organization and ArchitectureDocument29 pagesMultiprocessors: COMP 211 - Computer Systems Organization and Architecture'Bryan Mendoza'Pas encore d'évaluation
- Multi-Processor / Parallel ProcessingDocument12 pagesMulti-Processor / Parallel ProcessingSayan Kumar KhanPas encore d'évaluation
- CH 2Document51 pagesCH 2yomem22745Pas encore d'évaluation
- Arkom 13-40275Document32 pagesArkom 13-40275Harier Hard RierPas encore d'évaluation
- Advance Computer Architecture2Document36 pagesAdvance Computer Architecture2AnujPas encore d'évaluation
- Parallel Computing Lecture # 6: Parallel Computer Memory ArchitecturesDocument16 pagesParallel Computing Lecture # 6: Parallel Computer Memory ArchitecturesKrishnammal SenthilPas encore d'évaluation
- MultiprocessorsDocument12 pagesMultiprocessorsquainoofelixPas encore d'évaluation
- CS8603 Unit IDocument35 pagesCS8603 Unit IPooja MPas encore d'évaluation
- Lec 5 SharedArch PDFDocument16 pagesLec 5 SharedArch PDFMuhammad ImranPas encore d'évaluation
- Multiprocessor Systems:: Advanced Operating SystemDocument60 pagesMultiprocessor Systems:: Advanced Operating SystemshaiqPas encore d'évaluation
- Lecture4 (Share Memory-"According Access")Document16 pagesLecture4 (Share Memory-"According Access")hussiandavid26Pas encore d'évaluation
- Flynn's Classification/ Flynn's Taxonomy:: StreamDocument13 pagesFlynn's Classification/ Flynn's Taxonomy:: StreamSaloni NayanPas encore d'évaluation
- Multicore ComputersDocument18 pagesMulticore ComputersMikias YimerPas encore d'évaluation
- Lec2 ParallelProgrammingPlatformsDocument26 pagesLec2 ParallelProgrammingPlatformsSAIPas encore d'évaluation
- Unit 6 - Computer Organization and Architecture - WWW - Rgpvnotes.inDocument14 pagesUnit 6 - Computer Organization and Architecture - WWW - Rgpvnotes.inNandini SharmaPas encore d'évaluation
- SAP UI5 COURSE CONTENT OdataDocument4 pagesSAP UI5 COURSE CONTENT Odatabala_07123Pas encore d'évaluation
- XML RPC in Odoo12Document2 pagesXML RPC in Odoo12bala_07123100% (1)
- Stop and Wait Protocol: Ex. No.1 (A) Date: AimDocument53 pagesStop and Wait Protocol: Ex. No.1 (A) Date: Aimbala_07123Pas encore d'évaluation
- UNIX Lab ExpDocument46 pagesUNIX Lab Expbala_07123Pas encore d'évaluation
- Objective of CNDocument5 pagesObjective of CNbala_07123Pas encore d'évaluation
- Data Management For Research: Aaron Collie, MSU Libraries Lisa Schmidt, University ArchivesDocument66 pagesData Management For Research: Aaron Collie, MSU Libraries Lisa Schmidt, University Archivesbala_07123Pas encore d'évaluation
- Map of Human Computer Interaction: What Does The Discipline of HCI Cover? Why Study HCI?Document11 pagesMap of Human Computer Interaction: What Does The Discipline of HCI Cover? Why Study HCI?bala_07123Pas encore d'évaluation
- GPS Location InformationDocument8 pagesGPS Location Informationbala_07123Pas encore d'évaluation
- Cp5191 MLT Unit IIDocument27 pagesCp5191 MLT Unit IIbala_07123Pas encore d'évaluation
- CS8383 OOPS Lab SyllabusDocument2 pagesCS8383 OOPS Lab Syllabusbala_071230% (1)
- 9 - Introduction Graph TheoryDocument70 pages9 - Introduction Graph Theorybala_07123Pas encore d'évaluation
- Cp5191 MLT Unit IIDocument27 pagesCp5191 MLT Unit IIbala_07123Pas encore d'évaluation
- CN Lab Manual R2013Document38 pagesCN Lab Manual R2013bala_07123Pas encore d'évaluation
- Computer Science / It GATE Papers With Answer Keys and SolutionDocument18 pagesComputer Science / It GATE Papers With Answer Keys and Solutionbala_07123Pas encore d'évaluation
- SNS College of Engineering: Department of Computer Science and Engineering Web Interface DesignDocument24 pagesSNS College of Engineering: Department of Computer Science and Engineering Web Interface Designbala_07123Pas encore d'évaluation
- CP7212 Operating Systems Design Lab ManualDocument86 pagesCP7212 Operating Systems Design Lab Manualbala_07123Pas encore d'évaluation
- Computer Science and Information Technology 11th Feb 2017 Session 1 180 100Document27 pagesComputer Science and Information Technology 11th Feb 2017 Session 1 180 100bala_07123Pas encore d'évaluation
- Marthandam College of Engineering and Technology: Unit Ii Trees, Connectivity & PlanarityDocument2 pagesMarthandam College of Engineering and Technology: Unit Ii Trees, Connectivity & Planaritybala_07123Pas encore d'évaluation
- Latest Features in Ab Initio - 2.14Document3 pagesLatest Features in Ab Initio - 2.14ahm117Pas encore d'évaluation
- RGU M.Tech (CSE) SyllabusDocument15 pagesRGU M.Tech (CSE) SyllabusutpalrguPas encore d'évaluation
- Flynn's ClassificationDocument46 pagesFlynn's ClassificationmasumiPas encore d'évaluation
- Nisn GandaDocument24 pagesNisn Gandamiftahul ulumPas encore d'évaluation
- Visit:: Join Telegram To Get Instant Updates: Contact: MAIL: Instagram: Instagram: Whatsapp ShareDocument31 pagesVisit:: Join Telegram To Get Instant Updates: Contact: MAIL: Instagram: Instagram: Whatsapp ShareVidyashree M SPas encore d'évaluation
- Ktu s2 Mtech Cse SyllabusDocument32 pagesKtu s2 Mtech Cse SyllabussamushabuPas encore d'évaluation
- Blockchain Technology and ApplicationsDocument58 pagesBlockchain Technology and ApplicationspadiPas encore d'évaluation
- Lecture 2 Lecture PPT #3,4,5,6Document34 pagesLecture 2 Lecture PPT #3,4,5,6ali hassanPas encore d'évaluation
- Introduction To WishboneDocument6 pagesIntroduction To WishboneIan KatsunoPas encore d'évaluation
- Top Down Distribution Explained With An ExampleDocument4 pagesTop Down Distribution Explained With An ExampleDevesh ChangoiwalaPas encore d'évaluation
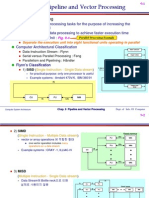
- Chap. 9 Pipeline and Vector ProcessingDocument12 pagesChap. 9 Pipeline and Vector ProcessingBikaraj SinghaPas encore d'évaluation
- 18116029Document6 pages18116029Gurpreet SinghPas encore d'évaluation
- PDC - Lecture - No. 3Document34 pagesPDC - Lecture - No. 3nauman tariqPas encore d'évaluation
- DS Chapter 3Document39 pagesDS Chapter 3Maddula PrasadPas encore d'évaluation
- Wood Carving SimulatorDocument40 pagesWood Carving SimulatorUnnikrishnan RadhakrishnanPas encore d'évaluation
- (123doc) Dien Tu Vien Thong c16 Instructionlevel Parallelism and Superscalar Processors 39 g3 KhotailieuDocument71 pages(123doc) Dien Tu Vien Thong c16 Instructionlevel Parallelism and Superscalar Processors 39 g3 KhotailieuNguyễn Hoàng HảiPas encore d'évaluation
- Advances in Computer Systems Architecture 8 Acsac 2003 2823 2003 354020122x 419sDocument419 pagesAdvances in Computer Systems Architecture 8 Acsac 2003 2823 2003 354020122x 419sKeithPas encore d'évaluation
- Workflow and Parallel Extensionsin NET4Document22 pagesWorkflow and Parallel Extensionsin NET4Andrei FilipPas encore d'évaluation
- TorchrecDocument20 pagesTorchrecyang guPas encore d'évaluation
- ch09 Morris ManoDocument15 pagesch09 Morris ManoYogita Negi RawatPas encore d'évaluation
- Sybase Performance and Tuning Guide-Vol2Document380 pagesSybase Performance and Tuning Guide-Vol2mSyb2008prkPas encore d'évaluation
- The Design and Analysis of Parallel Algorithm by S.G.aklDocument415 pagesThe Design and Analysis of Parallel Algorithm by S.G.aklVikram Singh70% (10)
- PipeliningDocument13 pagesPipeliningCS20B1031 NAGALAPURAM DAATHWINAAGHPas encore d'évaluation
- Week 1 Quiz Coursera AnswDocument7 pagesWeek 1 Quiz Coursera AnswPraveen Kumar ReddyPas encore d'évaluation
- GPFS For AIX PDFDocument304 pagesGPFS For AIX PDFKarthikeyan ManisekaranPas encore d'évaluation
- 2 Performance MatiricesDocument22 pages2 Performance MatiricesAbhishek JindalPas encore d'évaluation
- Network Simulation and Its Limitations: Sebastian RampflDocument7 pagesNetwork Simulation and Its Limitations: Sebastian RampflEs AmPas encore d'évaluation
- Flynn's Taxonomy of Computer ArchitectureDocument8 pagesFlynn's Taxonomy of Computer ArchitectureRajani SurejaPas encore d'évaluation
- 2012 - Kiss Et Al. - Parallel Realization of The Element-By-element FEM Technique by CUDADocument4 pages2012 - Kiss Et Al. - Parallel Realization of The Element-By-element FEM Technique by CUDAThiago de SousaPas encore d'évaluation
- HCIA-Cloud Computing V4.0 Learning GuideDocument144 pagesHCIA-Cloud Computing V4.0 Learning GuideAntonildo LimaPas encore d'évaluation