Vous aimerez peut-être aussi
- Acordes de OceanosDocument3 pagesAcordes de OceanosprofedanielPas encore d'évaluation
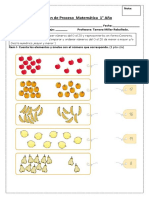
- 1-Ev MATE 2019Document5 pages1-Ev MATE 2019profedaniel100% (1)
- Lecturas Comprensivas DiariasDocument3 pagesLecturas Comprensivas DiariasMarielaPas encore d'évaluation
- Lecturas Comprensivas DiariasDocument3 pagesLecturas Comprensivas DiariasMarielaPas encore d'évaluation
- Pauta de Observacion Docente OriginalDocument9 pagesPauta de Observacion Docente OriginalprofedanielPas encore d'évaluation
- VISIONDocument7 pagesVISIONprofedanielPas encore d'évaluation
- Acordes de OceanosDocument3 pagesAcordes de OceanosprofedanielPas encore d'évaluation
- Roles y FuncionesDocument3 pagesRoles y FuncionesprofedanielPas encore d'évaluation
- Entrega de Documentos, FirmaDocument1 pageEntrega de Documentos, FirmaprofedanielPas encore d'évaluation
- Cntenido Currciular 2019 SEXTODocument6 pagesCntenido Currciular 2019 SEXTOprofedanielPas encore d'évaluation
- Presidenta de Cursos Microcentros 2019Document1 pagePresidenta de Cursos Microcentros 2019profedanielPas encore d'évaluation
- Ficha de Aprendizaje CREATIVODocument4 pagesFicha de Aprendizaje CREATIVOprofedanielPas encore d'évaluation
- 37 CopiasDocument2 pages37 CopiasFernandaOrtegaCárdenasPas encore d'évaluation
- Formato Plan Pedagógico de La JECDDocument2 pagesFormato Plan Pedagógico de La JECDprofedanielPas encore d'évaluation
- Familia GuacatelaDocument3 pagesFamilia Guacatelaprofedaniel0% (1)
- Bitacora FuncionariosDocument3 pagesBitacora FuncionariosprofedanielPas encore d'évaluation
- Evaluación José Perez AstronautaDocument3 pagesEvaluación José Perez Astronautaprofedaniel100% (3)
- Iñigo y La Serpiente Multicolor 4ADocument3 pagesIñigo y La Serpiente Multicolor 4AprofedanielPas encore d'évaluation
- Prueba de Diario Secreto Susi Paul 4BDocument2 pagesPrueba de Diario Secreto Susi Paul 4BprofedanielPas encore d'évaluation
- Lecturas Diarias 2019, HabilidadesDocument1 pageLecturas Diarias 2019, HabilidadesprofedanielPas encore d'évaluation
- Iñigo y La Serpiente Multicolor 4ADocument3 pagesIñigo y La Serpiente Multicolor 4AprofedanielPas encore d'évaluation
- La Escapada de EmaDocument4 pagesLa Escapada de EmaprofedanielPas encore d'évaluation
- Evaristo El CarteroDocument4 pagesEvaristo El Carteroprofedaniel33% (3)
- Antes Que El VeranoDocument4 pagesAntes Que El Veranoprofedaniel0% (1)
- Los Pecosos 2Document2 pagesLos Pecosos 2profedanielPas encore d'évaluation
- La Escapada de EmaDocument4 pagesLa Escapada de EmaprofedanielPas encore d'évaluation
- Nadie Quiere Jugar ConmigoDocument3 pagesNadie Quiere Jugar ConmigoprofedanielPas encore d'évaluation
- Los Pecosos 2Document2 pagesLos Pecosos 2profedanielPas encore d'évaluation
- Evaluacion La Noche Del MeteoritoDocument6 pagesEvaluacion La Noche Del MeteoritoprofedanielPas encore d'évaluation
- AzabacheDocument4 pagesAzabacheprofedanielPas encore d'évaluation
- Ejercicios Capítulo 4Document5 pagesEjercicios Capítulo 4Jean CallPas encore d'évaluation
- $RRJSCBPDocument32 pages$RRJSCBPPAUL SIERRA CORDOVAPas encore d'évaluation
- Taller Clase VectorDocument2 pagesTaller Clase VectorLuisPas encore d'évaluation
- Quimica (Estequiometria y Gases) Cuaderno de Trabajo UNACARDocument94 pagesQuimica (Estequiometria y Gases) Cuaderno de Trabajo UNACARYulma DocePas encore d'évaluation
- Guia N 2 II Periodo Matematicas 5Document3 pagesGuia N 2 II Periodo Matematicas 5danny mosqueraPas encore d'évaluation
- La Construcción de La Noción de Número en PreescolarDocument5 pagesLa Construcción de La Noción de Número en PreescolarRubén Omar BarraganPas encore d'évaluation
- SEMANA - 9 - 2017 - 2 - Física Térmica - Energía en Los Procesos TérmicosDocument30 pagesSEMANA - 9 - 2017 - 2 - Física Térmica - Energía en Los Procesos TérmicosKevin O. BallardoPas encore d'évaluation
- Materiales y MetodosDocument26 pagesMateriales y MetodosThaiiz MarcaPas encore d'évaluation
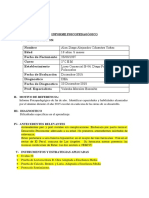
- Informe Psicopedagogico AlanDocument3 pagesInforme Psicopedagogico AlanMayito EscobarPas encore d'évaluation
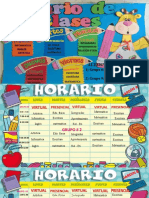
- Horario de Clase para Jardin.Document3 pagesHorario de Clase para Jardin.norys DomínguezPas encore d'évaluation
- Matemáticas Once. Cesar HerreraDocument5 pagesMatemáticas Once. Cesar HerreraPaula DuartePas encore d'évaluation
- Ejercicios de MatemáticasDocument6 pagesEjercicios de MatemáticasVirginia Navarro MartinezPas encore d'évaluation
- Lección 01 - Teoría de ExponentesDocument8 pagesLección 01 - Teoría de ExponentesRodrigoPas encore d'évaluation
- Permutacion y CombinacionDocument19 pagesPermutacion y CombinacionjulioPas encore d'évaluation
- PROGRAMACIÓN DIGITAL CON PythonDocument41 pagesPROGRAMACIÓN DIGITAL CON PythonRuben WilliamPas encore d'évaluation
- XXXXXXX SESION 01 - SIN SOLUCIONDocument8 pagesXXXXXXX SESION 01 - SIN SOLUCIONRafael Cjuno HuamanPas encore d'évaluation
- Estudiondencason2 9961384673b06f0Document4 pagesEstudiondencason2 9961384673b06f0Valentina BetancourtPas encore d'évaluation
- Cuadro Sinoptico Julio Cesar Toledo ClimacoDocument1 pageCuadro Sinoptico Julio Cesar Toledo ClimacoJulio ToledoPas encore d'évaluation
- Actividad Experimental #6 Ley de Conservación de La MasaDocument5 pagesActividad Experimental #6 Ley de Conservación de La Masaanon_3820164Pas encore d'évaluation
- Michael SpivakDocument2 pagesMichael SpivakAmérico Pahuara QuispePas encore d'évaluation
- Pendulo BalisticoDocument5 pagesPendulo BalisticoDiana RuizPas encore d'évaluation
- Breve Historia de La GeodesiaDocument4 pagesBreve Historia de La Geodesiaedwar141267Pas encore d'évaluation
- Matematicas 2ºeso2Document15 pagesMatematicas 2ºeso2Alejandro GárciaPas encore d'évaluation
- Laboratorio 2 - Quispe CusipumaDocument10 pagesLaboratorio 2 - Quispe CusipumaGabriela QcPas encore d'évaluation
- Refuerzos - 2021 MatematicasDocument3 pagesRefuerzos - 2021 MatematicasLUIS MIGUEL GUTIERREZ RODRIGUEZPas encore d'évaluation
- Una Lectura Del Seminario "De Un Otro Al Otro" - Freudiana (1-4)Document58 pagesUna Lectura Del Seminario "De Un Otro Al Otro" - Freudiana (1-4)Roberto Rojas AracenaPas encore d'évaluation
- Expresiones-Algebraicas 4°Document2 pagesExpresiones-Algebraicas 4°Rosslady Pizarro100% (1)
- Ejercicios de Limites INDETERMINADOSDocument6 pagesEjercicios de Limites INDETERMINADOSIgnacio EstebanPas encore d'évaluation
- Ver21 Sep Rm11 CDocument6 pagesVer21 Sep Rm11 CMaría Cecilia RomeroPas encore d'évaluation