Vous aimerez peut-être aussi
- Taller 2 - Redacción de HallazgosDocument6 pagesTaller 2 - Redacción de HallazgosLynn Vante100% (1)
- Qué Es Una Técnica InstruccionalDocument2 pagesQué Es Una Técnica InstruccionalRosselys RodriguezPas encore d'évaluation
- Mapa Conceptual de Ingenieria EconomicaDocument1 pageMapa Conceptual de Ingenieria EconomicaJosh Knarf ArellanoPas encore d'évaluation
- Pruebas Seguimiento y Uso de Guantes FinDocument7 pagesPruebas Seguimiento y Uso de Guantes FinBenjaa AlarconPas encore d'évaluation
- Mantenimiento General de Calderas de Vapor 1Document39 pagesMantenimiento General de Calderas de Vapor 1Renzo TuestasPas encore d'évaluation
- Creacion de Blog Con Blogger IntranetDocument12 pagesCreacion de Blog Con Blogger IntranetMaricusa100% (2)
- Carta Cambio Carga SueltaDocument108 pagesCarta Cambio Carga SueltaTatiana ReinaPas encore d'évaluation
- Huacariz SacDocument18 pagesHuacariz SacErman Encina RequelmePas encore d'évaluation
- Global GeometríaDocument3 pagesGlobal GeometríaMelissa GarcíaPas encore d'évaluation
- Planeacion Financiera - 8A - Estados Financieros Proforma - Ramirez YamiletDocument46 pagesPlaneacion Financiera - 8A - Estados Financieros Proforma - Ramirez Yamiletlin gargozPas encore d'évaluation
- Organización de Las BrigadasDocument2 pagesOrganización de Las BrigadasYhony Narvaez TtitoPas encore d'évaluation
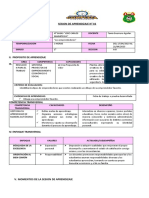
- Sesión de Aprendizaje 02 - 1gradoDocument2 pagesSesión de Aprendizaje 02 - 1gradoCRISTIAN MORENO PAICOPas encore d'évaluation
- Programacion C++Document185 pagesProgramacion C++Sergio RodriguezPas encore d'évaluation
- Parcial - Escenario 4 - GESTIÓN DE INVENTARIOS Y ALMACENAMIENTODocument15 pagesParcial - Escenario 4 - GESTIÓN DE INVENTARIOS Y ALMACENAMIENTOAndrea PardoPas encore d'évaluation
- Resol Seps Igt Igs Insesf Inr Ingint Inseps 009 Norma de Canales ElectronicosDocument19 pagesResol Seps Igt Igs Insesf Inr Ingint Inseps 009 Norma de Canales Electronicosadamaris AzaPas encore d'évaluation
- La Regulacion de Los Algoritmos AranzadiDocument16 pagesLa Regulacion de Los Algoritmos AranzadifuckPas encore d'évaluation
- Recursos Adicionales Fotografía de ViajesDocument3 pagesRecursos Adicionales Fotografía de ViajesSergio Fernando MACIAS PACHONPas encore d'évaluation
- Gestión de Riesgos en Planificación de La EjecucionDocument36 pagesGestión de Riesgos en Planificación de La EjecucionMichael D LlsPas encore d'évaluation
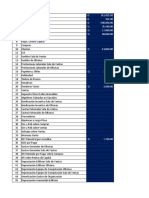
- Balance de Prueba A Abril 31 de 2021Document14 pagesBalance de Prueba A Abril 31 de 2021Yoiner GuzmanPas encore d'évaluation
- Hoja de Trabajo de Las GuacamayasDocument4 pagesHoja de Trabajo de Las GuacamayasKevin TzináPas encore d'évaluation
- Grupo Gloria-1Document17 pagesGrupo Gloria-1flor guevaraPas encore d'évaluation
- Modelo de ContratacionDocument4 pagesModelo de ContratacionAnonymous KnK6kC5EPas encore d'évaluation
- ForoDocument2 pagesForoStrd VnssPas encore d'évaluation
- Guías Ideas Fuerza-Manifiesto RuralDocument4 pagesGuías Ideas Fuerza-Manifiesto RuralBrayanPas encore d'évaluation
- Modelo de Contestacion A La Demanda EjecutivaDocument4 pagesModelo de Contestacion A La Demanda Ejecutivajulyparker9Pas encore d'évaluation
- Informe Contraloría Sobre Pagos Irregulares en La Municipalidad de VentanillaDocument39 pagesInforme Contraloría Sobre Pagos Irregulares en La Municipalidad de VentanillaRodrigo CruzPas encore d'évaluation
- Matriz de ConsistenciaDocument6 pagesMatriz de ConsistenciaAndres TorresPas encore d'évaluation
- SPEECH DE VENTA TELEMARKETING CERO ACCIDENTES - Versión FinalDocument16 pagesSPEECH DE VENTA TELEMARKETING CERO ACCIDENTES - Versión FinalChristopher L'cPas encore d'évaluation
- 2017 Chevrolet Spin X2 (L2C)Document5 pages2017 Chevrolet Spin X2 (L2C)todos inacapPas encore d'évaluation
- Apertura Sucesion David SuarezDocument3 pagesApertura Sucesion David Suarezluis guillermoPas encore d'évaluation