Académique Documents
Professionnel Documents
Culture Documents
Anexos Cloro
Transféré par
Grace QuelalCopyright
Formats disponibles
Partager ce document
Partager ou intégrer le document
Avez-vous trouvé ce document utile ?
Ce contenu est-il inapproprié ?
Signaler ce documentDroits d'auteur :
Formats disponibles
Anexos Cloro
Transféré par
Grace QuelalDroits d'auteur :
Formats disponibles
The Solution of the Navier-Stokes 3D Equation
is Based on Quantum Mechanics.
Edward Jiménez
Faculty of Chemical Engineering, Central University of Ecuador,
Quito 170521, Ecuador.
September 13, 2017
Abstract
The solution of the Navier-Stokes 3D equation is a logistic probability
1
function P (x; y; z; t) = p0 1=2 , which allows us to deter-
1+e 2
t (x2 +y 2 +z 2 )
mine the velocity …eld, pressure and concentration of energetic molecules
of a ‡uid. The dynamic solution naturally develops on a spherical sur-
face, corresponding to a macroscopic vortex which meets the theorem of
the implicit function of an …xed point f (t; r) = 0 and with the theorem of
expected value E [r j r 0].
In addition, this solution converges to the stationary solution given
by Laplace equation. Finally, we present an algorithm that explains both
velocity behavior and the dynamics of pressure u = 2 rP P
; p = po P .
1 Introduction
For our demonstrations, we will use strictly the scheme presented by Fe¤erman
in http://www.claymath.org/millennium-problems, where six demonstrations are
required to accept as valid a solution to the Navier-Stokes 3D equation. Fe¤er-
man (2017).
1=2
The velocity de…ned as u = 2 rP 2 2
P ; with a radius noted as r = x + y + z
2
1
where P (x; y; z; t) is the logistic probability function P (x; y; z; t) = 1+ekt r ;
and the expected value E(r j r 0) < C exist. The term P is de…ned in
(x; y; z) 2 R3 ; t 0 ; where constants k > 0; > 0 and P (x; y; x; t) is the
general solution of the Navier-Stokes 3D equation, which has to satisfy the con-
ditions (1) and (2), allowing us to analyze the dynamics of an incompressible
‡uid. J. Leray (1934), L. Ca¤arelli (1982), V.V. Kulish (2002).
@u rp
+ (u:r) u = r2 u ((x; y; z) 2 R3 ; t 0) (1)
@t 0
With, u 2R3 an known velocity vector, 0 constant density of ‡uid, dy-
namic viscosity, cinematic viscosity, and pressure p = p0 P in (x; y; z) 2 R3 ; t 0 .
13 Sep 2017 06:25:42 PDT
Version 1 - Submitted to Acta Math.
Where velocity and pressure are depending of r and t. We will write the
condition of incompressibility.
r:u = 0 ((x; y; z) 2 R3 ; t 0) (2)
The initial conditions of ‡uid movement u0 (x; y; z), are determined for t = 0.
Where speed u0 must be C 1 divergence -free vector.
u(x; y; z; 0) = u0 (x; y; z) ((x; y; z) 2 R3 ) (3)
For physically reasonable solutions, we make sure u(x; y; z; t) does not grow
large as r ! 1: We will restrict attention to initial conditions u0 that satisfy.
K
@x u0 C K (1 + r) on R3 for any and K (4)
The Clay Institute accepts a physically reasonable solution of (1), (2) and
(3), only if it satis…es:
p; u 2 C 1 (R3 [0; 1)) (5)
and the …nite energy condition.
Z
2
ju(x; y; z; t)j dxdydz C for all t 0 (bounded energy). (6)
R3
The problems of Mathematical Physics are solved by the Nature, guiding
the understanding, the scope, the limitations and the complementary theories.
These guidelines of this research were: the probabilistic elements of Quantum
Mechanics, the De Broglie equation and the Heisenberg Uncertainty principle.
1.1 De…nitions
Attenuation coe¢ cient.
We will use the known attenuation formula of an incident ‡ux I0 ; for which
I = I0 e r . Where, I0 initial ‡ux and attenuation coe¢ cient of energetic
molecules that enter into interaction and/or resonance with the target molecules,
transmitting or capturing the maximum amount of energy.
Growth coe¢ cient.
We will use an equation analogous to concentration equation of Physical
Chemistry C = C0 ekt , where k = 2p0 ; is growth coe¢ cient, p0 is the initial
pressure of our ‡uid, the dynamic viscosity and C0 the initial concentration
of energetic ‡uid molecules.
It is evident that, in equilibrium state we can write r = kt, however,
the Navier-Stokes equation precisely measures the behavior of the ‡uids out of
equilibrium, so that: r 6= kt.
13 Sep 2017 06:25:42 PDT
Version 1 - Submitted to Acta Math.
Fortunately, there is a single solution for out-of-equilibrium ‡uids, using
1
the …xed-point theorem for implicit functions, 1+ekt r = 2r ; the proof is
demostrated in Theorem 1.
Dimensional Analysis.
We will de…ne the respective dimensional units of each one of variables and
physical constants that appear in the solution of the Navier-Stokes 3D equation.
2
Kinematic viscosity = 0 ; [ ms ]
Dynamic viscosity ; [pa.s], where pa represents pascal pressure unit.
Initial Pressure of out of equilibrium. p0 ;[pa]
kg 3
Fluid density 0 ; [ m3 ], where kg is kilogram and m cubic meters.
1
Logistic probability function, P (x; y; z; t) = 1+ekt r ; it is a real number
0 P 1:
Equilibrium condition , r = k t = 2 p00 t = jue j t; [m].
Fluid velocity in equilibrium, jue j ; [m=s] :
Fluid …eld velocity out of equilibrium, u = 2 (1 P )rr: [m/s].
1=2
Position, r = x2 + y 2 + z 2 ; [m].
Attenuation coe¢ cient, ;[1/m].
Growth coe¢ cient, k = 2p00 ; [1/s].
Concentration C = C0 1 PP :
E¢ cient Frontier.
Spherical surface of an implicit function f (t; r) = 0 of time t and radius
1=2
r = x2 + y 2 + z 2 , which represents the solution set of the Navier-Stokes
3D equation. Every moving particle or ‡uid has energy measured with some
D E
2 1=2
standard deviation E E : By the Heisenberg principle of uncertainty
D E
2 1=2
we know that there exists an unavoidable uncertainty in time t t
D E D
2 1=2
E
2 1=2
given by: E E t t h=2 , where h is the Plank constant.
Theorem 1 The velocity of the ‡uid is given by u = 2 rP P ; where P (x; y; z; t)
1
is the logistic probability function P (x; y; x; t) = 1+ekt r ; and p pressure such
that p = p0 P; both de…ned on (x; y; z) 2 R3 ; t 0 : The function P is the
general solution of the Navier Stokes equations, which satis…es conditions (1)
and (2).
Proof. To verify condition (2), r:u = 0; we must calculate the gradients and
(y2 +z2 )+(x2 +z2 )+(x2 +y2 )
laplacians of the radius. rr = xr ; yr ; zr ; and r2 r = r:rr = (x2 +y 2 +z 2 )3=2
=
2
r:
rP
r:u = 2 r: = 2 r ((1 P ) rr) (7)
P
13 Sep 2017 06:25:42 PDT
Version 1 - Submitted to Acta Math.
2
Replacing the respective values for the terms: r2 r and jrrj in the equation
(7).
r:u = 2 r ((1 P ) rr) (8)
= 2 r ((1 P ) rr)
h i
2
= 2 (P P 2 ) jrrj + (1 P ) r2 r
2
Where the gradient modulus of rP = (P P 2 )rr, has the form jrP j =
2 2
(P P 2 )2 jrrj = 2 (P P 2 )2 .
2
r:u = 2 (1 P) P+ =0 (9)
r
Simplifying for (1 P ) 6= 0, we obtain the main result of this paper, which
represents a …xed point of an implicit function f (t; r) where f (t; r) = P 2r = 0.
1 2
P = = ((x; y; z) 2 R3 ; t 0)
1+ ekt (x2 +y 2 +z 2 )1=2 1=2
(x2 + y2 + z2)
(10)
Equation (10) has a solution according to the …xed-point theorem of an
implicit function, and it is a solution to the Navier Stokes stationary equations,
which are summarized in: r2 P = 2 r2 1r = 0: Furthermore, it is the typical
solution of the Laplace equation for the pressure of the ‡uid r2 p = p0 r2 P = 0.
Kerson Huang (1987).
To this point, we need to verify that equation (10) is also a solution of re-
rp
quirement (1), @u
@t + (u:r) u = r u
2
0
. We will do the equivalence u = r
after we replace in equation (1). Taking into account that = 2 ln(P );
and that r is irrotational, r r = 0, we have: (u:r) u = (r :r) r =
1
2 r (r :r ) r (r r ) = 12 r (r :r ) ; and r2 u = r (r:u) r
(r u) = r (r:r ) r (r r ) = r r2 : Simplifying terms in order
to replace these results in equation (1) we obtain
!
2
1 jrP j
(u:r) u= r (r :r ) = 2 2 r
2 P2
r2 u=r (r:u) = r r2 =0
!
2
jrP j r2 P
= 2 r =0
P2 P
The explicit form of velocity is u = 2 (1 P )rr:
@u
= 2 kP (1 P )rr;
@t
rp p0
= P (1 P )rr:
0 0
13 Sep 2017 06:25:42 PDT
Version 1 - Submitted to Acta Math.
rp
After replacing the last four results (u:r) u; r2 u, @u
@t and 0
in equation (1)
we obtain (11).
!
2
2 jrP j p0
2 kP (1 P )rr = 2 r 2
P (1 P )rr: (11)
P 0
jrP j2
The equation (11) is equivalent to equation (1). After obtaining the term P2
jrP j2 r2 P
from the incompressibility equation r r2 = 2 r P2 + P = 0
and replacing in equation (11).
2 r2 P p0
2 kP (1 P )rr = 2 r P (1 P )rr: (12)
P 0
Equation (10) simultaneously ful…lls requirements (1) expressed by equation (12)
and requirement (2) expressed by equation (7), for a constant k = 2p00 = 2p0 :
Moreover, according to equation (10), the probability P = 2r which allows the
Laplace equation to be satis…ed: r2 P = 2 r2 1r = 0: In other words, the
Navier-Stokes 3D equation system is solved.
Implicit Function.
1 2
An implicit function de…ned as (10), f (t; r) = 1+ekt r r = 0 has a
…xed point (t; r) of R = f(t; r) j 0 < a t b; 0 < r < +1g, where m and M
are constants, such as: m M: Knowing that the partial derivative exists:
@r f (t; r) = P (1 P ) + 2r2 we can assume that: 0 < m @r f (t; r) M:
If, in addition, for each continuous function ' in [a; b] the composite function
g(t) = f (t; '(t)) is continuous in [a; b] ; then there is one and only one function:
r = '(t) continuous in [a; b], such that f [t; '(t)] = 0 for all t in [a; b].
1 2
Theorem 2 An implicit function de…ned as (10) f (t; r) = 1+ekt r r = 0
has a …xed point (t; r) of R = f(t; r) j 0 < a t b; 0 < r < +1g. In this way,
the requirements (1) and (2) are ful…lled.
Proof. Let C be the linear space of continuous functions in [a; b], and de…ne
an operator T : C ! C by the equation:
1
T ' (t) = ' (t) f [t; ' (t)] :
M
Then we prove that T is a contraction operator, so it has a unique …xed
point r = '(t) in C. Let us construct the following distance.
f [t; ' (t)] f [t; (t)]
T ' (t) T (t) = ' (t) (t) :
M
Using the mean value theorem for derivation, we have
f [t; ' (t)] f [t; (t)] = @ f (t; z(t)) [' (t) (t)] :
13 Sep 2017 06:25:42 PDT
Version 1 - Submitted to Acta Math.
Where (t) is situated between ' (t) and (t). Therefore, the distance equation
can be written as:
@ f (t; z(t))
T ' (t) T (t) = [' (t) (t)] 1
M
Using the hypothesis 0 < m @r f (t; r) M we arrive at the following result:
@ f (t; (t)) m
0 1 1 ;
M M
with which we can write the following inequality:
m
jT ' (t) T (t)j = j' (t) (t)j 1 k' k: (13)
M
m
Where = 1 M . Since 0 < m M; we have 0 < 1. The above
inequality is valid for all t of [a; b]. Where T is a contraction operator and
the proof is complete, since for every contraction operator T : C ! C there
exists one and only one continuous function ' in C; such that T (') = '. Using
equation (10), which represents the fundamental solution of the Navier-Stokes
3D equation, we verify equation (2), which represents the second of the six
requirements of an acceptable solution.
Proposition 3 Requirement (3). The initial velocity can be obtained from:
u(x; y; z; 0) = 2 rP
P ; where each of the components ux ; uy and uz are in…nitely
derivable.
x y z
u(x; y; z; 0) = u0 (x; y; z) = 2 (1 P0 ) ; ; ((x; y; z) 2 R3 )
r r r
(14)
1
P0 = r0
1+e
x x x
Proof. Taking the partial derivatives of @xn r ; @yn r and @zn r .
x 1 1
@xn = n@xn 1
+ x@xn (15)
r r r
x 1 1
@yn = n@yn 1
+ y@yn
r r r
x 1 1
@zn = n@zn 1
+ z@zn
r r r
Recalling the derivatives of special functions (Legendre), it is veri…ed that
there exists the derivative C 1 .
13 Sep 2017 06:25:42 PDT
Version 1 - Submitted to Acta Math.
1 n
(n+1)
x
@xn = ( 1) n! x2 + y 2 + z 2 2
Pn ( 1=2
) (16)
r (x2 + y2 + z2)
1 n
(n+1)
y
@yn = ( 1) n! x2 + y 2 + z 2 2
Pn ( 1=2
)
r (x2 + y 2 + z 2 )
1 n
(n+1)
z
@zn = ( 1) n! x2 + y 2 + z 2 2
Pn ( 1=2
)
r (x2 + y 2 + z 2 )
Physically, this solution is valid for the initial velocity, indicated by Eq. (4),
where the components of the initial velocity are in…nitely di¤erentiable, and
make it possible to guarantee that the velocity of the ‡uid is zero when r ! 1.
Proposition 4 Requirement (4). Using the initial velocity of a moving ‡uid
given by u(x; y; z; 0) = u0 (x; y; z) = 2 (1 P0 ) xr ; yr ; zr , it is evident that
K
@x u0 C K (1 + r) on R3 for any and K
Proof. Using the initial velocity of a moving ‡uid given by u0 (x; y; z) =
2 (1 P0 ) xr ; yr ; zr , we can …nd each of the components: @x u0x ; @y u0y and
@z u0z :
x 2 1 1 1 1
1 1
@x = @x + x@x @x + x@x
r r r r r
For the three components x; y; z the results of the partial derivatives are as
follows:
2 2 2
x 2 11 11 1 1
@x = @x + 2 x@x @x + x2 @x (17)
r r r r r
2 2 2
y 2 11 11 1 1
@y = @y + 2 y@y @y + y 2 @y
r r r r r
2 2 2
z 2 11 11 1 1
@z = @z + 2 z@z @z + z 2 @z
r r r r r
Replacing equation (17) with the explanatory form of the Legendre polynomials,
for the following terms @x 1 1r and @x 1r :
1 ( +1)
x
@x = ( 1) ! x2 + y 2 + z 2 2
P ( 1=2
) (18)
r (x2 + y 2 + z 2 )
11 1 x
@x = ( 1) ( 1)! x2 + y 2 + z 2 2
P 1( 1=2
)
r (x2 + y2 + z2)
13 Sep 2017 06:25:42 PDT
Version 1 - Submitted to Acta Math.
Also, knowing that for each 0, the maximum value of P (1) = 1:. We
can write the following inequality
2
1 2
x2 @x x2 ( !) r 2( +1)
(19)
r
11 1 2 1 2 1
2 x@x @x 2x ( !) ( 1)! ( 1) r
r r
2
2 1 1 2 2 2
@x (( 1)!) r
r
2 y 2 z 2
Grouping terms for @x xr ; @y r and @z r we have the next expressions.
" #
2 2
x 2
2 x2 ( !) 2x ( !) 2 2
@x r + (( 1)!) (20)
r r2 r
" #
2 2
y 2
2 y 2 ( !) 2y ( !) 2 2
@y r + (( 1)!)
r r2 r
" #
2 2
z 2
2 z 2 ( !) 2z ( !) 2 2
@z r + (( 1)!)
r r2 r
2 2 1=2
z 2
The module of @x u0 is given by @x u0 = @x xr + @y yr + @z r :
Simplifying and placing the terms of equation (20) we have
" #
2
2 2 2(x + y + z) ( !)
@x u0 r 2 3 ( !) + 2 (( 1)!)
r
x y z
Taking into consideration that r 1; r 1; r 1 the last term @x u0
can be easily written that.
2 ( !) h z i
2
x y
@x u0 2 + + +
r2 r r r
2
10 ( !)
@x u0
r2
2
It is veri…ed that there exists C = 10 ( !) such that if r ! 0; then @x u0 ! 0:
Thus, we proved requirement (4).
According to Mathematics, and giving an integral physical structure to the
study, we need to prove that there are the spatial and temporal derivatives of
the velocity and pressure components, satisfying the requirement (5).
Proposition 5 Requirement (5). The velocity can be obtained from: u(x; y; z; t) =
2 rP
P and each of the components ux ; uy and uz are in…nitely derivable.
13 Sep 2017 06:25:42 PDT
Version 1 - Submitted to Acta Math.
x y z
2
u(x; y; z; t) = 2 ; ; ((x; y; z) 2 R3 ) (21)
r2 r2 r2
1 2
P (x; y; z; t) = p0 =
1+e 2 t r r
x x x
Proof. Taking partial derivatives for @xn r2 ; @yn r2 and @zn r2 .
x 1 1
@xn = n@xn 1
+ x@xn (22)
r2 r2 r2
x 1 1
@yn = n@yn 1
+ y@yn
r2 r2 r2
x 1 1
@zn = n@zn 1
+ z@zn
r2 r2 r2
Recalling the derivatives of special functions, it is veri…ed that the derivative
C 1 exists. These derivatives appear as a function of the Legendre polynomialsPn (:).
1 n (n+1) x
@xn = ( 1) n! x2 + y 2 + z 2 Pn ( ) (23)
r2 (x2 + y 2 + z 2 )
1 n (n+1) y
@yn = ( 1) n! x2 + y 2 + z 2 Pn ( 2 )
r2 (x + y 2 + z 2 )
1 n (n+1) z
@zn = ( 1) n! x2 + y 2 + z 2 Pn ( 2 )
r2 (x + y 2 + z 2 )
There are the spatial derivatives n and the time derivative which is similar
to equations (25).
Proposition 6 Requirement (5). The pressure is totally de…ned by the equiv-
alence p(x; y; z; t) = p0 P (x; y; z; t) and is in…nitely di¤ erentiable in each of its
components.
p(x; y; z; t) = p0 P (x; y; z; t) ((x; y; z) 2 R3 ) (24)
1 1 1
Proof. Taking partial derivatives for ; @xn and r @yn
,recalling the
r @zn r
derivatives of special functions of equation (16), it is shown that the derivative
C 1 . We only have to …nd the time derivatives: @tn (p0 P ) = p0 @tn (P ). Using
equation (21) for P , we have.
@t P = ( k) P (1 P) (25)
2
@t2 P = ( k) (1 2P )P (1 P)
3
@t3 P = ( k) (1 2
6P + 6P )P (1 P)
4
@t4 P = ( k) (1 14P + 36P 2
24P 3 )P (1 P)
5
@t5 P = ( k) (1 30P + 150P 2 240P 3 + 120P 4 )P (1 P)
@tn (P ) = @t @tn 1 (P )
13 Sep 2017 06:25:42 PDT
Version 1 - Submitted to Acta Math.
It is always possible to …nd the derivative @tn (P ) as a function of the previous
derivative, since the resulting polynomial of each derivative n 1 is of degree
n.
Proposition 7 Requirement (6). The energy must be limited in a de…ned vol-
ume and fundamentally it must converge at any time, such that t 0.
Z
2
ju(x; y; z; t)j dxdydz C for all t 0 (bounded energy).
R3
Proof. We will use the explicit form of velocity given in equation (21) u(x; y; z; t) =
2 2
2 (1 P ) rr;to obtain the vector module: juj = 4 2 2 (1 P ) . Rewriting
equation (21), and applying a change of variable in: dxdydx = 4 r2 dr.
Z Z 1
2 2
ju(x; y; z; t)j dxdydz = 16 2 2 r2 (1 P ) dr (26)
R3 r0
Making another change of variable dP = P (1 P )dr. Using (10), replacing
2
2
r2 = P we have
Z Z P1 2
2 2 2 2 2 dP
ju(x; y; z; t)j dxdydz = 16 (1 P) (27)
R3 P0 P P (1 P )
2 Z P1
64 1 P
= dP
P0 P3
1
Where radius r ! 1; when t 0; we have limr!1 P = limr!1 exp(kt) =
1+ exp( r)
P1 = 1: Moreover, physically if r ! r0 0 then t ! 0 we have limr!0 P =
1 1 1
limr!0 exp(kt) = P0 = 2 : Here, a probability 2 represents maximum entropy.
1+ exp( r)
Z 2 Z 1 2 1
2 64 1 P 64 2P 1
ju(x; y; z; t)j dxdydz = dP = (28)
R3 1=2 P3 2P 2 1=2
Z 2
2 32
juj dxdydz for all t 0
R3
2
32
In this way the value of the constant C is C = :Verifying the proposition
(6) completely.
Lemma 8 The irrotational …eld represented by the logistic probability function
P (x; y; z; t) associated with the velocity u = 2 rP
P , can produce vortices, due
to the stochastic behavior of the physical variables p0 ; ; : These stochastic
variations are in orders lower than the minimum experimental value.
Proof. The implicit function representing the solution of the Navier-Stokes
1
3D equation, = 2r depends on the values of initial pressure p0 ,
1+e (
r k t)
10
13 Sep 2017 06:25:42 PDT
Version 1 - Submitted to Acta Math.
viscosity and attenuation coe¢ cient . Due to Heisenberg uncertainty prin-
ciple, these parameters have a variation when we measure and use them, as is
the case of the estimate of = r (t; k; ). The function (t; k; ) = k t;
expressly incorporates these results, when 1 < < +1. The physical and
mathematical realities are mutually conditioned and allow for these surprising
results. For a de…nite t there exist in…nities (x; y; z) that hold the relation-
1=2
ship r = x2 + y 2 + z 2 . Moreover, for a de…nite r there are in…nities t that
respect the …xed-point theorem and create spherical trajectories. When the
physical variables k; vary, even at levels of 1/100 or 1/1000, they remain be-
low the minimum variation of the experimental value. We could try to avoid
the existence of trajectories on the spherical surface, for which we must assume
that the ‡uid is at rest or it is stationary, which contradicts the Navier-Stokes
3D equation, where all ‡uid is in accelerated motion @u @t 6= 0. In short, if there
are trajectories in the sphere as long as it is probabilistically possible, this is
reduced to showing that the expected value of the radius E [r j r 0] exists and
it is …nite.
Derivation of E(r j r 0):
The logistic density function for when E( ) = 0 and V ar( ) = 2 is de…ned
by p
exp( )
h( ) = [1+exp( )]2
; where 1 = 3= is a scale parameter. Given that r =
exp[ r ( )= ]
(t; p0 ; ; ) + function for r is then f (r) = [1+exp( (r ( ))= ]2
; to facilitate
k
the calculations we put ( ) = (t; k; ) = t. By de…nition, the truncated
density for r when r 0 is given by f (r j r 0) = P f(r(r)0) for r 0: Given
1
that the cumulative distribution function for r is given by F (r) = 1+exp(kt r) ;it
exp( ( ))) 1
follows that P (r 0) = 1 F (0) = 1+exp( ( ))) = 1+exp( ( ))) The derivation
of E(r j r 0) then proceeds as follows:
Z 1 Z 1
1 exp [kt r]
E (r j r 0) = rf (r j r 0)dr = r 2 dr
0 P (r 0) 0 f1 + exp [kt r]g
(29)
Z 1
1 2 dP
E(r) j r 0) = ( P (1 P ))
P (r 0) 1=2 P P (1 P )
2
We replaced in equation (29) dP = P (1 P )dr and r2 = 2P of this
manner we obtain
Z 1
1 2 dP 1 2
E(r) j r 0) = ( P (1 P )) = log(2)
P (r 0) 1=2 P P (1 P ) P (r 0)
(30)
where we have used the fact that
exp kt
P (r 0) =
1 + exp kt
11
13 Sep 2017 06:25:42 PDT
Version 1 - Submitted to Acta Math.
1 2 2
E(r) j r 0) = log(2)
log(2) for all t 0 (31)
P (r 0)
where the last equality follows from an application of the L’Hopital’s rule
exp kt
P (r 0) = limt!1 1+exp kt = 1.
2 Discussion of Results.
Spherical surfaces does not imply spacetime curve
In Fe¤erman (2017), "In particular, the singular set u cannot contain a
spacetime curve of the form (x; t) 2 R3 R : x = (t) : This is the best partial
regularity theorem known so far the Navier-Stokes equation. It appears to be
very hard to go further"
1
Using equation (10), which is an implicit function of a …xed point p0
t r
=
1+e 2
2
r it is possible to obtain spherical trajectories, although this does not neces-
sarily
p imply a spacetime curve. For this case we must clearly rewrite r =
x2 + y 2 + z 2 and (x; y; z; t) 2 R3 R+ : r = (t) . Where a natural con-
stant 2p0 appears, which in the equilibrium satis…es r = 2p0 t and has a repre-
sentation similar to the Reynolds number.
Solution algorithm
1. We de…ne a value of the initial pressure p0 and of viscosity in air,
water and blood plasma. These variables are determined by instruments with
a certain degree of accuracy. However, the measurement of a physical vari-
able always has an uncertainty independent of the accuracy of the instruments.
Intrinsic uncertainty is determined by Heisenberg’s uncertainty principle.
2. The function that solves the Navier-Stokes 3D equation is a logistic
probability density. The attenuation coe¢ cient of incident molecules is which
has a positive value, while the coe¢ cient that weighs the evolution in time
depends on pressure and dynamic viscosity 2p0 . P (x; y; z; t) = 1
p0
t r
1+e 2
3. For each time value t there exists a …xed point r(x; y; z; t) that allows
x
to fully comply with the Navier-Stokes 3D equation. Where 1 r +1;
y z
1 r +1 and 1 r +1:
4. If we determine experimentally the value of variation of the parame-
ters p0 ; ; ; we …nd the average value of r and the standard deviation of r,
determining a spherical cap in which the Navier-Stokes 3D equation are satis-
…ed.
5. We calculate probabilities P (x; y; z; t); concentrations C(x; y; z; t), pres-
sures p = p0 P and the velocity …eld u = 2 rP P of ‡uids. Also, when we apply
the respective algorithm, we clearly see how for a de…nite radius r that we …nd an
D E D E
2 1=2 2 1=2
interval with in…nite time values t 2 t t t t t+ t t ,
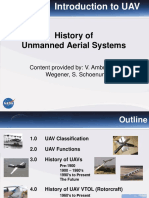
even for variations of less than 1% in the parameters k = 2p00 ; . In the follow-
ing …gures: green color indicates minimal experimental variations in parameters
superior to 1%, while red color indicates variations parameters less than 1%.
12
13 Sep 2017 06:25:42 PDT
Version 1 - Submitted to Acta Math.
Man Graphic Plasma (T=37°C)
2.0
1.5
t *(10E-6)
1.0
0.5
0.0
0.5 1.0 1.5 2.0
r*(10E-6)
1 2 1 2
1+e3 :5126t 3:5126r = 3:5126r 1+e3 :2546t 3:2546r = 3:2546r
AIR-WATER (T=25 ºC)
1.0
0.8
0.6
t*(10E-6)
0.4
0.2
0.0
0.0 0.2 0.4 0.6 0.8 1.0
r*(10E-6)
1 2
1+e5 :62t 5:62r = 5:62r
3 Conclusions
Turbulent ‡ows and vortices.
The necessary condition for the existence of turbulent ‡ows occurs when the
velocity of the ‡uid juj > jue j = 2p0 is greater than the equilibrium velocity
13
13 Sep 2017 06:25:42 PDT
Version 1 - Submitted to Acta Math.
jue j, obtained as a function of the parameters of the medium such as: initial
pressure p0 , dynamic viscosity and attenuation coe¢ cient .
The su¢ cient condition for the existence of vortices is given by the …xed-
point theorem in implicit functions and by the expected value theorem of the
logistic density function, which complemented the requirement (6).
The statistical equilibrium of a physical system such as a ‡uid is obtained
for the maximum entropy corresponding to the probability value of P = 12 ;
and physically it is equivalent to kt r = 0.
The function r = (t) that appears in the …xed-point theorem and in the
expected value theorem needs to be generalized to respect the Heisenberg’s
theorem, which involves the intrinsic variation of x; y; z; t, and energy, as
follows: r = (t; k; ):
p0
Stochastic ‡uctuations of the parameters k = 2 and
The evolution of pressure and velocity also depends on the stochastic ‡uc-
tuations of the parameters, which are local and not global.
We obtain a dynamic and probabilistic solution of the Navier-Stokes 3D
equation, which represents a …xed point. This function corresponds to a spher-
ical boundary, de…ned for the solution of the Navier Stokes equations. This
spherical surface is the macroscopic solution domain, and it is a vortex.
At the macroscopic level, turbulence centers are also resonance centers
where energy is e¢ ciently deposited or captured. Turbulence is where and when
all random e¤ects cancel out and only cooperative e¤ects of order and apparent
coordination are manifested, creating minimal entropy.
Quantum Mechanics.
De Broglie’s law is the bridge between Quantum Mechanics and Navier-
Stokes 3D equation, by virtue of this complementarity:
Fluid molecules interact as incompressible spheres between them, similar
to a pool game between experts and produce curved displacements and
vortices. All collisions that produce random e¤ects cancel each other out
and do not produce vortices, whereas coordinated and correlated collisions
can produce quantum vortices.
Viscosity represents the velocity of the De Broglie wave packet. Can be
understood as quantum adherence.
Minimal entropy governs turbulence sustained at the molecular level and
at the macroscopic level, where the e¤ects are cooperative, causal and long
range. The cooperation is manned by order and by the viscosity, causing
a chain of events unfortunate for humans, which at the level of physics are
simply processes of minimal entropy.
A way to eliminate the destructive turbulences in vortices, could be by
maximization of entropy.
14
13 Sep 2017 06:25:42 PDT
Version 1 - Submitted to Acta Math.
References
[1] Fe¤erman (2017). EXISTENCE AND SMOOTHNESS OF THE
NAVIER–STOKES EQUATION CHARLES L. FEFFERMAN,
http://www.claymath.org/millennium-problems/navier%E2%80%93stokes-
equation Accesed 01/05/2017.
[2] V. V. Kulish (2002). On the Relationship between Fluid Velocity and de
Broglie’s Wave Function and the Implications to the Navier –Stokes Equa-
tion. International Journal of Fluid Mechanics Research, Vol. 29, No. 1, 2002
.
[3] J. Leray, Sur le mouvement d’un liquide visquex emplissent l’espace, Acta
Math. J. 63 (1934).
[4] L. Ca¤arelli, R. Kohn, and L. Nirenberg. Partial regularity of suitable weak
solutions of the Navier–Stokes equations, Comm. Pure & Appl. Math. 35
(1982), 771–831.
[5] Kerson Huang (1987). Statistical Mechanics, 2nd Edition, John Willey &
Sons, 1987.
A Euler Equation.
For the Euler equation we have to rede…ne theqvelocity, because = 0:
1 2 p0 rP
The speed needs to be de…ned as u = 0 P
; where P (x; y; z; t) is the
p 1
logistic probability function P (x; y; x; t) = 2 p0 t (x2 +y2 +z2 )1=2
; de…ned in
1+e 0
(x; y; z) 2 R3 ; t 0 This P is the general solution of the Euler 3D equations,
which satis…es the conditions (E1) and (E2), allowing to analyze the dynamics
of an incompressible ‡uid without viscosity.
@u rp
+ (u:r) u = ((x; y; z) 2 R3 ; t 0) (E1)
@t 0
Where, u 2R3 an known velocity vector, 0 constant density of ‡uid and
pressure p = p0 P 2 R.
With speed and pressure dependent on r and t: We will write the condition
of incompressibility as follows.
r:u = 0 ((x; y; z) 2 R3 ; t 0) (E2)
q
p0 rP
Theorem 9 The velocity of the ‡uid given by: u = 2
0 P
; where P (x; y; z; t)
p 1
is the logistic probability function P (x; y; x; t) = 2 p0 t (x2 +y2 +z2 )1=2
; de-
1+e 0
…ned in (x; y; z) 2 R3 ; t 0 is the general solution of the Euler equations,
which satis…es conditions (E1) and (E2).
15
13 Sep 2017 06:25:42 PDT
Version 1 - Submitted to Acta Math.
Proof. Firstly, we will make the equivalence u = r and replace it in equation
(1). Taking into account that r is irrotational, r r = 0, we have.
1 1
(u:r) u = (r :r) r = r (r :r ) r (r r )= r (r :r ) ;
2 2
We can write,
@ 1
r + (r :r ) = r ( p)
@t 2
It is equivalent to,
@ 1 p
+ (r :r ) =
@t 2 0
where p is the di¤erence between the
q actual pressure p and certain reference
pressure p0 : Now, replacing = 1 2 p00 ln(P ); the Euler Stokes equation be-
comes.
@P p
= P (E3)
@t 0
The external force is zero, so that there is only a constant force F due to the
variation of the pressure on a cross section . Where is the total cross section
of all events, including scattering, absorption, or transformation to another
species.
F = p = p0 0 (E4)
0
p=p p0 = 1 p0 = (1 P )p0
putting (E3) in (E4) we have
r
@P p0
= 2
(1 P )P (E5)
@t 0
x y z
In order to verify equation (E2), r:u = 0; we need to obtain rr = r; r; r ;
(y2 +z2 )+(x2 +z2 )+(x2 +y2 )
2
r r = r:rr = (x2 +y 2 +z 2 )3=2
= 2r :
r r " #
2
1 p0 rP 1 p0 r2 P jrP j
r:u = 2
r: = 2
(E6)
0 P 0 P P2
2
Replacing the respective values for the terms: r2 P and jrP j of equation (E6).
The Laplacian of P can be written as follows.
r2 P = (1 2P )rP:rr + (P P 2 )r2 r (E7)
2 2
= (1 2P )(P P 2 ) jrrj + (P P 2 )r2 r
2 2
= (1 2P )(P P 2 ) + (P P 2)
r
16
13 Sep 2017 06:25:42 PDT
Version 1 - Submitted to Acta Math.
2 2
Using gradient rP = (P P 2 )rr, modulus jrP j = 2
(P P 2 )2 jrrj and
r2 P in (E6). " #
r 2
1 p0 r2 P jrP j
r:u = 2
= (E8)
0 P P2
Replacing equations (E7) and (E8) in (E6) we obtain the main result of the
Euler equations, the solution represents a …xed point of an implicit function
2
f (t; r) where f (t; r) = P r = 0.
1 2
P = q = 1=2
((x; y; z) 2 R3 ; t 0)
2 p0 (x2 +y 2 +z 2 )1=2
1+e 0
t (x2 + y2 + z2)
(E9)
Equation (E9) has solution according to the …xed-point theorem of an implicit
function, also it is a solution to the Euler 3D stationary equations. These
are summarized in: r2 P = 2 r2 1r = 0 which is the typical solution of the
Laplace equation for probability P , constructed di¤erently from the Navier-
Stokes equation.
17
13 Sep 2017 06:25:42 PDT
Version 1 - Submitted to Acta Math.
Vous aimerez peut-être aussi
- Lectures On Plasma Physics - Problems and SolutionsDocument39 pagesLectures On Plasma Physics - Problems and SolutionsAvanish K Singh50% (2)
- ATX Specification - Revision 1.1, February 1996Document15 pagesATX Specification - Revision 1.1, February 1996ivanagui2Pas encore d'évaluation
- FIDIC Red Book Construction Contract 1st Edition 1 9Document9 pagesFIDIC Red Book Construction Contract 1st Edition 1 9raviPas encore d'évaluation
- Leeson Speedmaster ManualDocument80 pagesLeeson Speedmaster ManualOrbán Árpád100% (1)
- Physical Chemistry (1) : Quantum Mechanical PostulatesDocument41 pagesPhysical Chemistry (1) : Quantum Mechanical PostulatesNAMEPas encore d'évaluation
- Physics Chap 5 SlidesDocument40 pagesPhysics Chap 5 SlidesBISWAKESH MALLICKPas encore d'évaluation
- Global Well-Posedness For The Density-Dependent Incompressible Magnetohydrodynamic Flows in Bounded DomainsDocument13 pagesGlobal Well-Posedness For The Density-Dependent Incompressible Magnetohydrodynamic Flows in Bounded DomainsNo FacePas encore d'évaluation
- Elementary DiffysDocument14 pagesElementary DiffysMarvin LabajoPas encore d'évaluation
- PHYS 8158 F17 Lecture 1 082417Document7 pagesPHYS 8158 F17 Lecture 1 082417Crystal CardenasPas encore d'évaluation
- Exam 1Document2 pagesExam 1lookyoursoulPas encore d'évaluation
- SF2521NPDE hmwk1-2Document5 pagesSF2521NPDE hmwk1-2BlooD LOVERPas encore d'évaluation
- Revised Notes of Unit 2Document17 pagesRevised Notes of Unit 2kanishkmodi31Pas encore d'évaluation
- 5 Ec DifDocument4 pages5 Ec DifSalvador Alejandro Ochoa OregonPas encore d'évaluation
- Ruy RYO JUANDocument30 pagesRuy RYO JUANJean-Daniel DjidaPas encore d'évaluation
- Extraexercises MergedDocument11 pagesExtraexercises MergedFarhadul HaquePas encore d'évaluation
- 2 LectDocument21 pages2 LectkazimmehdiPas encore d'évaluation
- Henriksson, Exercises For QMDocument25 pagesHenriksson, Exercises For QMhristos314Pas encore d'évaluation
- Phys215 Lecture4 PDFDocument25 pagesPhys215 Lecture4 PDFSuryaksh Singh ChaudharyPas encore d'évaluation
- TOV Equation With LambdaDocument16 pagesTOV Equation With LambdaNestor Rodrigo Ahumada AhumadaPas encore d'évaluation
- Tut 8Document3 pagesTut 8Qinglin LiuPas encore d'évaluation
- Tut 8Document3 pagesTut 8Qinglin LiuPas encore d'évaluation
- Ch40 Young FreedmanxDocument26 pagesCh40 Young FreedmanxAndrew MerrillPas encore d'évaluation
- L23 - Postulates of QMDocument24 pagesL23 - Postulates of QMdomagix470Pas encore d'évaluation
- SPP-2010-6A-01 Cañeso Et AlDocument4 pagesSPP-2010-6A-01 Cañeso Et AlPerry EsguerraPas encore d'évaluation
- 117Document11 pages117Mohammad Imran ShafiPas encore d'évaluation
- Black Holes: A Prediction of Theory or Phantasy?Document6 pagesBlack Holes: A Prediction of Theory or Phantasy?Isaac CalderPas encore d'évaluation
- Notes Lauri Oksanen Inverse PbsDocument24 pagesNotes Lauri Oksanen Inverse PbsAlba García RuizPas encore d'évaluation
- Module 2: Quantum MechanicsDocument43 pagesModule 2: Quantum MechanicsYashi GoswamiPas encore d'évaluation
- Relativistic Di Ration in TimeDocument18 pagesRelativistic Di Ration in TimeKaren VillaPas encore d'évaluation
- Galerkin-Wavelet Methods For Two-Point Boundary Value ProblemsDocument22 pagesGalerkin-Wavelet Methods For Two-Point Boundary Value ProblemsAlloula AlaePas encore d'évaluation
- Quantum or Wave Mechanics: N Z X - H Z e N Z ' e H N Z ' e EDocument39 pagesQuantum or Wave Mechanics: N Z X - H Z e N Z ' e H N Z ' e EJoyce Castil (Joyceee)Pas encore d'évaluation
- N Body1 PDFDocument10 pagesN Body1 PDFSABUPas encore d'évaluation
- Spring Term 2019 Revision Problem SheetDocument2 pagesSpring Term 2019 Revision Problem SheetRoy VeseyPas encore d'évaluation
- Damped Harmonic Oscillator: Wednesday, 23 October 2013Document9 pagesDamped Harmonic Oscillator: Wednesday, 23 October 2013MayaIsStupidPas encore d'évaluation
- Chapter1-Physical Principles of Quantum MechanicsDocument12 pagesChapter1-Physical Principles of Quantum MechanicsIda ItriesnaPas encore d'évaluation
- Home Assignment 1 PHY 306/604 Advanced Statistical MechanicsDocument4 pagesHome Assignment 1 PHY 306/604 Advanced Statistical MechanicsSayan KuntiPas encore d'évaluation
- Keel - TaoDocument25 pagesKeel - TaogcdPas encore d'évaluation
- QSP Examples1Document8 pagesQSP Examples1Utilities CoPas encore d'évaluation
- Copia de Theoretical Particle Physics SISSA Entrance ExaminationsDocument169 pagesCopia de Theoretical Particle Physics SISSA Entrance ExaminationsSalim DávilaPas encore d'évaluation
- Global Well-Posedness, Scattering and Blow-Up For The Energy-Critical, Focusing, Non-Linear Schrödinger Equation in The Radial CaseDocument31 pagesGlobal Well-Posedness, Scattering and Blow-Up For The Energy-Critical, Focusing, Non-Linear Schrödinger Equation in The Radial Casekalim6054Pas encore d'évaluation
- Analysis On The Derivation of The Schrödinger Equation With Analogy To Electromagnetic Wave EquationDocument7 pagesAnalysis On The Derivation of The Schrödinger Equation With Analogy To Electromagnetic Wave EquationKhalil SukurPas encore d'évaluation
- Phy306 ProbsDocument25 pagesPhy306 ProbsKazi Abu RousanPas encore d'évaluation
- Ps 7Document4 pagesPs 7Muskan BuraPas encore d'évaluation
- PY 502, Computational Physics, Fall 2018 Numerical Solutions of The SCHR Odinger EquationDocument26 pagesPY 502, Computational Physics, Fall 2018 Numerical Solutions of The SCHR Odinger Equationnagatopein6Pas encore d'évaluation
- Solving Schrödinger Equation For A Particle in One-Dimensional Lattice: An Homotopy Perturbation ApproachDocument11 pagesSolving Schrödinger Equation For A Particle in One-Dimensional Lattice: An Homotopy Perturbation ApproachOrlando Solis MariacaPas encore d'évaluation
- Oep Fem PDFDocument17 pagesOep Fem PDFManoj BaralPas encore d'évaluation
- On A Nonlocal Nonlinear Schrödinger Equation With Self-Induced Parity-Time-Symmetric PotentialDocument10 pagesOn A Nonlocal Nonlinear Schrödinger Equation With Self-Induced Parity-Time-Symmetric PotentialMuhammad IkhwanPas encore d'évaluation
- 1 SCHR Odinger's Equation: One-Dimensional, Time-Dependent VersionDocument9 pages1 SCHR Odinger's Equation: One-Dimensional, Time-Dependent VersionArpita AwasthiPas encore d'évaluation
- Nonuniqueness of Weak Solutions To The Navier-Stokes EquationDocument36 pagesNonuniqueness of Weak Solutions To The Navier-Stokes EquationEduardo CamachoPas encore d'évaluation
- Chapter 2 - Postulates of Quantum MechanicsDocument11 pagesChapter 2 - Postulates of Quantum Mechanicssolomon mwatiPas encore d'évaluation
- 1512 01814Document13 pages1512 01814dibekayaPas encore d'évaluation
- Reger-Gorder2013 Article Lane-EmdenEquationsOfSecondKinDocument14 pagesReger-Gorder2013 Article Lane-EmdenEquationsOfSecondKinveeramPas encore d'évaluation
- Problem Set 9 - 3DSEDocument4 pagesProblem Set 9 - 3DSEJessePas encore d'évaluation
- 24 LaserFlashMethod PDFDocument4 pages24 LaserFlashMethod PDFAkash KumarPas encore d'évaluation
- Chapter 1. The Euclidean Space.2016-2Document19 pagesChapter 1. The Euclidean Space.2016-2Mena SaPas encore d'évaluation
- Chap7 Schrodinger Equation 1D Notes s12Document14 pagesChap7 Schrodinger Equation 1D Notes s12arwaPas encore d'évaluation
- Particles in Two-Dimensional Boxes: Separation of Variables in One DimensionDocument4 pagesParticles in Two-Dimensional Boxes: Separation of Variables in One Dimensionabbasmohammadi661583Pas encore d'évaluation
- Questions and Answers of T3 PDFDocument3 pagesQuestions and Answers of T3 PDFlaure100% (1)
- Classical MechanicsDocument6 pagesClassical MechanicsSebastian Soto PerdomoPas encore d'évaluation
- Solid State Physics NotesDocument15 pagesSolid State Physics NotesSebastian YdePas encore d'évaluation
- Eviary - Of.seismic - Tomography.imaging - The.interior - Of.the - Earth.and - Sun SolutionsDocument63 pagesEviary - Of.seismic - Tomography.imaging - The.interior - Of.the - Earth.and - Sun SolutionsdoganaksariPas encore d'évaluation
- Exercises For TFFY54Document25 pagesExercises For TFFY54sattar28Pas encore d'évaluation
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)D'EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)Pas encore d'évaluation
- Matrix of Curriculum Standards With Corresponding Recommended Flexible Learning Delivery Mode and Materials Per Grading PeriodDocument2 pagesMatrix of Curriculum Standards With Corresponding Recommended Flexible Learning Delivery Mode and Materials Per Grading PeriodNora HerreraPas encore d'évaluation
- Ground Water Recharge Techniques 2Document141 pagesGround Water Recharge Techniques 2Ravi Bhushan SharmaPas encore d'évaluation
- Lesson 2: LO 1. Select Measuring Tools and Instruments and LO 2. Carry Out Measurements and CalculationsDocument8 pagesLesson 2: LO 1. Select Measuring Tools and Instruments and LO 2. Carry Out Measurements and Calculationsmico alilayaPas encore d'évaluation
- Lecture Notes For Week Ten Mechanics of Chain DrivesDocument11 pagesLecture Notes For Week Ten Mechanics of Chain DrivesJohn KimaniPas encore d'évaluation
- History of UASDocument44 pagesHistory of UASAswin BalasubramaniamPas encore d'évaluation
- East West Pipe Rack For Piping Project J-80: Sendan International Company LTDDocument25 pagesEast West Pipe Rack For Piping Project J-80: Sendan International Company LTDFarrukh Javed100% (1)
- RR 5200Document22 pagesRR 5200Andrés RojasPas encore d'évaluation
- 200T 5 Pal 001 PDFDocument27 pages200T 5 Pal 001 PDFCornelius Price100% (1)
- Sonnax GM 6T40, 6T45, 6T50 Series Identification GuideDocument4 pagesSonnax GM 6T40, 6T45, 6T50 Series Identification GuideAlex DumasPas encore d'évaluation
- API HoistingDocument5 pagesAPI Hoistingchar_lynPas encore d'évaluation
- CNC Lathe Machines PDFDocument7 pagesCNC Lathe Machines PDFMetwally Naser100% (1)
- Norton Scan 12212Document4 pagesNorton Scan 12212Saurabh KumarPas encore d'évaluation
- Job Application and Cover LettersDocument1 pageJob Application and Cover LettersDyah AgPas encore d'évaluation
- Sphere FitupDocument103 pagesSphere FitupAnonymous wxLjBEzPas encore d'évaluation
- LI Report GuidelineDocument2 pagesLI Report GuidelineNaavalan Krishnaga Art'wPas encore d'évaluation
- Wings of Prey ManualDocument20 pagesWings of Prey ManualRaphael DoukkaliPas encore d'évaluation
- Unit 5: Extra Practice: KeyDocument1 pageUnit 5: Extra Practice: KeyMuniz BarbosaPas encore d'évaluation
- Sample Letters To DEPDocument7 pagesSample Letters To DEPSJLibraryPas encore d'évaluation
- Basic Yagi Antenna Design For The ExperimenterDocument9 pagesBasic Yagi Antenna Design For The ExperimenterKrista JacksonPas encore d'évaluation
- Refrigeration Orrifice Selection Chart PDFDocument2 pagesRefrigeration Orrifice Selection Chart PDFMacSpares100% (1)
- Science 6 Special - Properties of MatterDocument9 pagesScience 6 Special - Properties of MatterAxcyl Volleybolista PremaylonPas encore d'évaluation
- Cloud Infrastructure and ServicesDocument3 pagesCloud Infrastructure and ServicesShobha RaniPas encore d'évaluation
- Technical Summary: Semiconductor MC68HC11A8 MC68HC11A1 MC68HC11A0 8-Bit MicrocontrollersDocument45 pagesTechnical Summary: Semiconductor MC68HC11A8 MC68HC11A1 MC68HC11A0 8-Bit MicrocontrollersElias CoronelPas encore d'évaluation
- 8 - Field Inspectors (CQA) Certification ProgramDocument7 pages8 - Field Inspectors (CQA) Certification Program齐左Pas encore d'évaluation
- Et200sp Ai 4xrtd TC 2 3 4 Wire HF Manual en-US en-US PDFDocument80 pagesEt200sp Ai 4xrtd TC 2 3 4 Wire HF Manual en-US en-US PDFSrikar TanukulaPas encore d'évaluation
- MS301L11 Navigational Methods and Route Planning LADocument3 pagesMS301L11 Navigational Methods and Route Planning LASam HollidayPas encore d'évaluation
- CM-510.9 Crane ChecklistDocument2 pagesCM-510.9 Crane ChecklistHSE HerygintingPas encore d'évaluation