Vous aimerez peut-être aussi
- VLSI Interview QuestionsDocument19 pagesVLSI Interview QuestionssamPas encore d'évaluation
- Resource Efficient LDPC Decoders: From Algorithms to Hardware ArchitecturesD'EverandResource Efficient LDPC Decoders: From Algorithms to Hardware ArchitecturesPas encore d'évaluation
- Texas Instruments Placement Paper May 2011Document5 pagesTexas Instruments Placement Paper May 2011Shayendra RajuPas encore d'évaluation
- Cirrus Logic Interview TopicsDocument3 pagesCirrus Logic Interview TopicsGopi SundaresanPas encore d'évaluation
- Application-Specific Integrated Circuit ASIC A Complete GuideD'EverandApplication-Specific Integrated Circuit ASIC A Complete GuidePas encore d'évaluation
- Max Clock Frequency D-FF Circuit Buffer Design Latchup Prevention State Machines 2's Complimenter/TITLEDocument27 pagesMax Clock Frequency D-FF Circuit Buffer Design Latchup Prevention State Machines 2's Complimenter/TITLERui ChenPas encore d'évaluation
- Hspice 2005Document173 pagesHspice 2005何明俞Pas encore d'évaluation
- Millimicrosecond Pulse Techniques: International Series of Monographs on Electronics and InstrumentationD'EverandMillimicrosecond Pulse Techniques: International Series of Monographs on Electronics and InstrumentationPas encore d'évaluation
- Verilog Imp...Document105 pagesVerilog Imp...Arun JyothiPas encore d'évaluation
- DDDC87ECAA084E5DA4D2D77F7DC80391Document5 pagesDDDC87ECAA084E5DA4D2D77F7DC80391Sameer NandagavePas encore d'évaluation
- Thesis On LFSRDocument104 pagesThesis On LFSRKaran RoyPas encore d'évaluation
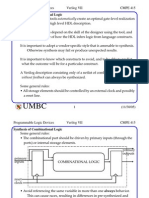
- Verilog VII Synthesis of Combinational LogicDocument18 pagesVerilog VII Synthesis of Combinational Logicvortex2910_899547857Pas encore d'évaluation
- Vlsi Design Study Notes12Document37 pagesVlsi Design Study Notes12gpuonline100% (1)
- PDDocument76 pagesPDKanhaiya MishraPas encore d'évaluation
- Design of CMOS Fully Differential Operational Transconductance AmplifierDocument24 pagesDesign of CMOS Fully Differential Operational Transconductance AmplifierAbhijit Kuvar100% (2)
- Advanced Communication Lab Manual: Visvesvaraya Technological UniversityDocument46 pagesAdvanced Communication Lab Manual: Visvesvaraya Technological UniversityPunith Gowda M B100% (2)
- Pre Final Sem Project ReportDocument79 pagesPre Final Sem Project Reportapi-301719207Pas encore d'évaluation
- Vlsi Design Flow PDFDocument13 pagesVlsi Design Flow PDFUdbhav MaheshwariPas encore d'évaluation
- Digital VLSI Design Standard Cell Libraries: Semester A, 2016-17 Lecturer: Dr. Adam TemanDocument32 pagesDigital VLSI Design Standard Cell Libraries: Semester A, 2016-17 Lecturer: Dr. Adam TemanThi NguyenPas encore d'évaluation
- How To Write FSM Is VerilogDocument8 pagesHow To Write FSM Is VerilogAyaz MohammedPas encore d'évaluation
- Timing Design in Digital Systems: Dr. Paul D. FranzonDocument24 pagesTiming Design in Digital Systems: Dr. Paul D. FranzonMaheshPas encore d'évaluation
- Qualcomm Interview AllDocument17 pagesQualcomm Interview AllVarun PPas encore d'évaluation
- IO Design, ESDDocument18 pagesIO Design, ESDashishmanyanPas encore d'évaluation
- Interconnect Noise Optimization in Nanometer TechnologiesDocument145 pagesInterconnect Noise Optimization in Nanometer TechnologiesSmile NagsPas encore d'évaluation
- VLSI Design Related Good QuestionsDocument2 pagesVLSI Design Related Good QuestionsGaurav PatelPas encore d'évaluation
- Interview QuestionsDocument2 pagesInterview QuestionskiruthikaPas encore d'évaluation
- 2 Mark Questions & AnswersDocument6 pages2 Mark Questions & AnswersMuthu KumarPas encore d'évaluation
- RTL Design FSM With DatapathDocument47 pagesRTL Design FSM With DatapathamaanrizaPas encore d'évaluation
- Low-Power Digital VLSI DesignDocument530 pagesLow-Power Digital VLSI DesignAllanki Sanyasi Rao50% (2)
- Digital Design Concepts ExplainedDocument3 pagesDigital Design Concepts Explainedthatflamyguy2216Pas encore d'évaluation
- Thesis PDFDocument110 pagesThesis PDFRohit PandeyPas encore d'évaluation
- Stuck at FaultDocument6 pagesStuck at Faultamy2chang_1Pas encore d'évaluation
- Hardware Modeling Using Verilog - Unit 2 - Week 1 AssignmentDocument3 pagesHardware Modeling Using Verilog - Unit 2 - Week 1 AssignmentgudduPas encore d'évaluation
- Cmos Digital Circuits - BookDocument56 pagesCmos Digital Circuits - BookHelder Nascimento100% (1)
- Clock Skew Filtering and Minimizing Short Path ProblemsDocument8 pagesClock Skew Filtering and Minimizing Short Path ProblemshardeepPas encore d'évaluation
- Test Benches in VerilogDocument16 pagesTest Benches in VerilogSharan ChaitanyaPas encore d'évaluation
- Edt Interview Questions VlsiDocument2 pagesEdt Interview Questions Vlsivasav10% (5)
- VLSI Interview Questions and AnswersDocument5 pagesVLSI Interview Questions and AnswersMahesh S GourPas encore d'évaluation
- VLSI Cadance ManualDocument84 pagesVLSI Cadance ManualTony ParkerPas encore d'évaluation
- Interrupt Latency Is The TimeDocument15 pagesInterrupt Latency Is The TimeishaanbhatiaPas encore d'évaluation
- BGRDocument30 pagesBGRMohammad Ayatullah MaktoomPas encore d'évaluation
- Arm Amba AhbDocument18 pagesArm Amba AhbgeethaPas encore d'évaluation
- Multichannel UartDocument16 pagesMultichannel UartMani Bharath Nuti100% (2)
- DPT and Color conflict in Physical designDocument4 pagesDPT and Color conflict in Physical designhardeepPas encore d'évaluation
- CmosDocument23 pagesCmoselumalaianithaPas encore d'évaluation
- Cadence TutorialDocument31 pagesCadence TutorialChetan BhasmePas encore d'évaluation
- Digital Design Through Verilog-18 PDFDocument31 pagesDigital Design Through Verilog-18 PDFAnanth G NPas encore d'évaluation
- Product How To Fully Utilize TSMC S 28HPC ProcessDocument8 pagesProduct How To Fully Utilize TSMC S 28HPC ProcessvpsampathPas encore d'évaluation
- Chapter 5 Ee604 PDFDocument56 pagesChapter 5 Ee604 PDFShakti ManugaranPas encore d'évaluation
- Vlsi Questions PDFDocument34 pagesVlsi Questions PDFp gangadhar KumarPas encore d'évaluation
- FPGA Interview QuestionsDocument12 pagesFPGA Interview QuestionsVirbhadra RathodPas encore d'évaluation
- Asynchronous FIFO Design Using VerilogDocument15 pagesAsynchronous FIFO Design Using Verilogkakaricardo2008Pas encore d'évaluation
- Process Variation Aware DesignDocument47 pagesProcess Variation Aware DesignThi NguyenPas encore d'évaluation
- Digital Design Interview Questions & AnswersDocument6 pagesDigital Design Interview Questions & AnswersSucharitha ReddyPas encore d'évaluation
- Logic Circuits Midterm ReviewerDocument38 pagesLogic Circuits Midterm ReviewerHector Ledesma IIIPas encore d'évaluation
- What Is Setup and Hold Time?Document12 pagesWhat Is Setup and Hold Time?Minu MathewPas encore d'évaluation
- Asic Design FlowDocument133 pagesAsic Design FlowrichbuggerPas encore d'évaluation
- Hierarchical DFT With Enhancements For AC Scan, Test Scheduling and On-Chip Compression - A Case StudyDocument9 pagesHierarchical DFT With Enhancements For AC Scan, Test Scheduling and On-Chip Compression - A Case StudyAman TyagiPas encore d'évaluation
- Schedule Training Evaluation E&ec 2012 PDFDocument4 pagesSchedule Training Evaluation E&ec 2012 PDFAman TyagiPas encore d'évaluation
- On Chip Clock Controller For At-Speed TestingDocument4 pagesOn Chip Clock Controller For At-Speed TestingSachin*123Pas encore d'évaluation
- Schmoo Plotting, Black ArtsDocument2 pagesSchmoo Plotting, Black ArtstheAMISHPas encore d'évaluation
- 6th Central Pay Commission Salary CalculatorDocument15 pages6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- Best Design Practices For DFTDocument9 pagesBest Design Practices For DFTnirajthakkarPas encore d'évaluation
- On DFTDocument16 pagesOn DFTAman TyagiPas encore d'évaluation
- Multiple Choice Linear Electronics Circuits - 102409023651 - 1Document15 pagesMultiple Choice Linear Electronics Circuits - 102409023651 - 1Ratheesh Rs50% (2)
- Ijtag April 2014 Tutorial PDFDocument53 pagesIjtag April 2014 Tutorial PDFAman TyagiPas encore d'évaluation
- Asset IeeeDocument7 pagesAsset IeeeprabuPas encore d'évaluation
- DFT Rule Checkers Glue Design TogetherDocument3 pagesDFT Rule Checkers Glue Design TogetherAman TyagiPas encore d'évaluation
- At-Speed Test Methods for LSSD and Mux Flip-Flop DesignsDocument5 pagesAt-Speed Test Methods for LSSD and Mux Flip-Flop DesignsAman TyagiPas encore d'évaluation
- DFT Lbist PDFDocument10 pagesDFT Lbist PDFAman TyagiPas encore d'évaluation
- Test Compression PDFDocument2 pagesTest Compression PDFAman TyagiPas encore d'évaluation
- A Built-In Redundancy-Analysis Scheme For Self-Repairable Rams With Two-Level RedundancyDocument9 pagesA Built-In Redundancy-Analysis Scheme For Self-Repairable Rams With Two-Level RedundancyAman TyagiPas encore d'évaluation
- A MBIST Controller Based On JTAG Interface Applied in Power Line ChipDocument3 pagesA MBIST Controller Based On JTAG Interface Applied in Power Line ChipAman TyagiPas encore d'évaluation
- Analog and Digital ElectronicsDocument111 pagesAnalog and Digital ElectronicsShiva CharanPas encore d'évaluation
- Memory Repair GuideDocument24 pagesMemory Repair GuideAman TyagiPas encore d'évaluation
- Ece 4750 Pset 4Document10 pagesEce 4750 Pset 4Aman TyagiPas encore d'évaluation
- Verilog Code For Fir FilterDocument5 pagesVerilog Code For Fir Filtersivasankarmeae100% (1)
- 50 Must Solve Dilr SolutionDocument7 pages50 Must Solve Dilr SolutionMonaliMadhulitaPas encore d'évaluation
- Chapter 2 of GeoDocument15 pagesChapter 2 of Geoharamritmalhi302Pas encore d'évaluation
- MathFundas WWW - Qmaths.inDocument64 pagesMathFundas WWW - Qmaths.inRobin VermaPas encore d'évaluation
- Logical: Reasoning SetsDocument20 pagesLogical: Reasoning SetsMohammad Ahzam67% (3)
- Total Gadha-Number System PDFDocument85 pagesTotal Gadha-Number System PDFChandramauli GovindPas encore d'évaluation
- Presentation CorpDocument10 pagesPresentation CorpAman TyagiPas encore d'évaluation
- India's Fastest Growing Test Prep PortalDocument13 pagesIndia's Fastest Growing Test Prep PortalAman TyagiPas encore d'évaluation
- From: Powered by ©Document10 pagesFrom: Powered by ©Aman TyagiPas encore d'évaluation
- SSRN Id2258333Document11 pagesSSRN Id2258333Aman TyagiPas encore d'évaluation
- Accenture - Sustaining Success in The Digital Era - The New Challenge For CableDocument16 pagesAccenture - Sustaining Success in The Digital Era - The New Challenge For CableAndrey PritulyukPas encore d'évaluation
- 9 Things I Do On Every MixDocument5 pages9 Things I Do On Every MixAcademia AudioplacePas encore d'évaluation
- ALFARABI UNIV COMPUTER ARCHITECTURE I CHAPTERDocument13 pagesALFARABI UNIV COMPUTER ARCHITECTURE I CHAPTERMohammed Al-RahmaweePas encore d'évaluation
- SEKN5013 DT T AdpDocument2 pagesSEKN5013 DT T AdpSarno MukriPas encore d'évaluation
- Festo Can Open CmmsDocument156 pagesFesto Can Open CmmsClaudio100% (1)
- Configuring A DC Sweep Analysis in Multisim - National InstrumentsDocument4 pagesConfiguring A DC Sweep Analysis in Multisim - National InstrumentsDina Alagić GolužaPas encore d'évaluation
- Audio Amplifier Circuit DiagramDocument1 pageAudio Amplifier Circuit DiagramRicky BaquirPas encore d'évaluation
- Microchip PeripheralsDocument8 pagesMicrochip PeripheralsAlejandro MufardiniPas encore d'évaluation
- CPC Full Training MaterialDocument54 pagesCPC Full Training Materialsanthosh100% (1)
- Everything: You Need To KnowDocument3 pagesEverything: You Need To KnowAndrew RossPas encore d'évaluation
- Dell XPS 15 9570 Laptop - Service Manual en PDFDocument94 pagesDell XPS 15 9570 Laptop - Service Manual en PDFSilver RoosterPas encore d'évaluation
- Elnet LT ManualDocument77 pagesElnet LT ManualSebastian TorresPas encore d'évaluation
- Service Manual: MODEL: DV6T711D / DV6T111D DV6T711P / DV6T111P DV6T711S / DV6T111S DV6T721D DV6T721P DV6T721SDocument65 pagesService Manual: MODEL: DV6T711D / DV6T111D DV6T711P / DV6T111P DV6T711S / DV6T111S DV6T721D DV6T721P DV6T721SloispfermarPas encore d'évaluation
- 8 Series Type Test Report EMI Power Frequency Immunity Test IEC60255-22-7: 2003Document11 pages8 Series Type Test Report EMI Power Frequency Immunity Test IEC60255-22-7: 2003andrez880103Pas encore d'évaluation
- ACS-AP Control PanelsDocument22 pagesACS-AP Control PanelsAdrián ValenzuelaPas encore d'évaluation
- Otis Software Basic Data PDFDocument23 pagesOtis Software Basic Data PDFReynold Suarez100% (1)
- Manual Intel D865GVHZ PDFDocument19 pagesManual Intel D865GVHZ PDFpedrojuanPas encore d'évaluation
- About This Chapter: AvailabilityDocument40 pagesAbout This Chapter: Availabilityyaser.ahmedPas encore d'évaluation
- Ecen 326 - Lab 9 ReportDocument6 pagesEcen 326 - Lab 9 Reportapi-241454978100% (1)
- Activity No. 2: Voltage Divider and Current Divider Circuit DesignDocument5 pagesActivity No. 2: Voltage Divider and Current Divider Circuit DesignFe Shannen CincoPas encore d'évaluation
- Digital Sound Projector: Owner'S ManualDocument101 pagesDigital Sound Projector: Owner'S ManualF CPas encore d'évaluation
- Articolo SWR EngDocument4 pagesArticolo SWR EngLuis Enrique Castillejo GonzalesPas encore d'évaluation
- Part List: MechanicalDocument12 pagesPart List: MechanicalshinigamiburakkuPas encore d'évaluation
- Mobile Phone Forensics Challenges, Analysis and Tools ClassificationDocument10 pagesMobile Phone Forensics Challenges, Analysis and Tools ClassificationSatish Reddy MallidiPas encore d'évaluation
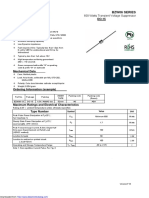
- 600W Transient Voltage Suppressor Technical SpecificationDocument7 pages600W Transient Voltage Suppressor Technical SpecificationNguyễn Văn TrungPas encore d'évaluation
- Medical Instrumentation Application and DesignDocument9 pagesMedical Instrumentation Application and DesignAndres ContrerasPas encore d'évaluation
- MH-MK2 Series Motherboard Replacement Guide: Tools NeededDocument5 pagesMH-MK2 Series Motherboard Replacement Guide: Tools Neededlaudith22Pas encore d'évaluation
- Problems: Combinational-Circuit Building BlocksDocument11 pagesProblems: Combinational-Circuit Building BlocksALEXANDER DIAZ SALAZARPas encore d'évaluation
- MCM Controller PDFDocument2 pagesMCM Controller PDFBangeswePas encore d'évaluation
- S1 Wireless BroadcastingDocument19 pagesS1 Wireless BroadcastingChesley CarolinoPas encore d'évaluation
- Microsoft Azure Infrastructure Services for Architects: Designing Cloud SolutionsD'EverandMicrosoft Azure Infrastructure Services for Architects: Designing Cloud SolutionsPas encore d'évaluation
- CCNA: 3 in 1- Beginner's Guide+ Tips on Taking the Exam+ Simple and Effective Strategies to Learn About CCNA (Cisco Certified Network Associate) Routing And Switching CertificationD'EverandCCNA: 3 in 1- Beginner's Guide+ Tips on Taking the Exam+ Simple and Effective Strategies to Learn About CCNA (Cisco Certified Network Associate) Routing And Switching CertificationPas encore d'évaluation
- The Ultimate Kali Linux Book - Second Edition: Perform advanced penetration testing using Nmap, Metasploit, Aircrack-ng, and EmpireD'EverandThe Ultimate Kali Linux Book - Second Edition: Perform advanced penetration testing using Nmap, Metasploit, Aircrack-ng, and EmpirePas encore d'évaluation
- Computer Networking: The Complete Guide to Understanding Wireless Technology, Network Security, Computer Architecture and Communications Systems (Including Cisco, CCNA and CCENT)D'EverandComputer Networking: The Complete Guide to Understanding Wireless Technology, Network Security, Computer Architecture and Communications Systems (Including Cisco, CCNA and CCENT)Pas encore d'évaluation
- Computer Networking: The Complete Beginner's Guide to Learning the Basics of Network Security, Computer Architecture, Wireless Technology and Communications Systems (Including Cisco, CCENT, and CCNA)D'EverandComputer Networking: The Complete Beginner's Guide to Learning the Basics of Network Security, Computer Architecture, Wireless Technology and Communications Systems (Including Cisco, CCENT, and CCNA)Évaluation : 4 sur 5 étoiles4/5 (4)
- CEH Certified Ethical Hacker Practice Exams, Third EditionD'EverandCEH Certified Ethical Hacker Practice Exams, Third EditionPas encore d'évaluation
- AWS Certified Cloud Practitioner Study Guide: CLF-C01 ExamD'EverandAWS Certified Cloud Practitioner Study Guide: CLF-C01 ExamÉvaluation : 5 sur 5 étoiles5/5 (1)
- The Compete Ccna 200-301 Study Guide: Network Engineering EditionD'EverandThe Compete Ccna 200-301 Study Guide: Network Engineering EditionÉvaluation : 5 sur 5 étoiles5/5 (4)
- Computer Systems and Networking Guide: A Complete Guide to the Basic Concepts in Computer Systems, Networking, IP Subnetting and Network SecurityD'EverandComputer Systems and Networking Guide: A Complete Guide to the Basic Concepts in Computer Systems, Networking, IP Subnetting and Network SecurityÉvaluation : 4.5 sur 5 étoiles4.5/5 (13)
- Evaluation of Some Websites that Offer Virtual Phone Numbers for SMS Reception and Websites to Obtain Virtual Debit/Credit Cards for Online Accounts VerificationsD'EverandEvaluation of Some Websites that Offer Virtual Phone Numbers for SMS Reception and Websites to Obtain Virtual Debit/Credit Cards for Online Accounts VerificationsPas encore d'évaluation
- Hacking: A Beginners Guide To Your First Computer Hack; Learn To Crack A Wireless Network, Basic Security Penetration Made Easy and Step By Step Kali LinuxD'EverandHacking: A Beginners Guide To Your First Computer Hack; Learn To Crack A Wireless Network, Basic Security Penetration Made Easy and Step By Step Kali LinuxÉvaluation : 4.5 sur 5 étoiles4.5/5 (67)
- Amazon Web Services (AWS) Interview Questions and AnswersD'EverandAmazon Web Services (AWS) Interview Questions and AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (3)
- ITIL 4: Digital and IT strategy: Reference and study guideD'EverandITIL 4: Digital and IT strategy: Reference and study guideÉvaluation : 5 sur 5 étoiles5/5 (1)
- The CompTIA Network+ Computing Technology Industry Association Certification N10-008 Study Guide: Hi-Tech Edition: Proven Methods to Pass the Exam with Confidence - Practice Test with AnswersD'EverandThe CompTIA Network+ Computing Technology Industry Association Certification N10-008 Study Guide: Hi-Tech Edition: Proven Methods to Pass the Exam with Confidence - Practice Test with AnswersPas encore d'évaluation
- ITIL 4: Create, Deliver and Support: Reference and study guideD'EverandITIL 4: Create, Deliver and Support: Reference and study guidePas encore d'évaluation
- ITIL® 4 Create, Deliver and Support (CDS): Your companion to the ITIL 4 Managing Professional CDS certificationD'EverandITIL® 4 Create, Deliver and Support (CDS): Your companion to the ITIL 4 Managing Professional CDS certificationÉvaluation : 5 sur 5 étoiles5/5 (2)
- AWS Certified Solutions Architect Study Guide: Associate SAA-C02 ExamD'EverandAWS Certified Solutions Architect Study Guide: Associate SAA-C02 ExamPas encore d'évaluation
- ITIL® 4 Direct, Plan and Improve (DPI): Your companion to the ITIL 4 Managing Professional and Strategic Leader DPI certificationD'EverandITIL® 4 Direct, Plan and Improve (DPI): Your companion to the ITIL 4 Managing Professional and Strategic Leader DPI certificationPas encore d'évaluation
- Introduction to Cyber-Warfare: A Multidisciplinary ApproachD'EverandIntroduction to Cyber-Warfare: A Multidisciplinary ApproachÉvaluation : 4.5 sur 5 étoiles4.5/5 (3)
- CCST Cisco Certified Support Technician Study Guide: Networking ExamD'EverandCCST Cisco Certified Support Technician Study Guide: Networking ExamPas encore d'évaluation