Vous aimerez peut-être aussi
- Resumen de Los Miserables de Victor HugoDocument17 pagesResumen de Los Miserables de Victor HugoJafet Suárez100% (1)
- MM ConsignaciónDocument13 pagesMM ConsignaciónRolando Moya Martinez100% (3)
- PROYECTODocument1 pagePROYECTOMarco ChiluizaPas encore d'évaluation
- F.P. Presentacion - Fashion - STEM - Julio - 2019 - Lago Agrio PDFDocument28 pagesF.P. Presentacion - Fashion - STEM - Julio - 2019 - Lago Agrio PDFMarco ChiluizaPas encore d'évaluation
- Informe 2 MecanismosDocument16 pagesInforme 2 MecanismosMarco ChiluizaPas encore d'évaluation
- Consulta 1 PLC IecDocument2 pagesConsulta 1 PLC IecMarco ChiluizaPas encore d'évaluation
- Consulta 1 PLC IecDocument2 pagesConsulta 1 PLC IecMarco ChiluizaPas encore d'évaluation
- Carta A GarciaDocument2 pagesCarta A Garciaerodas1Pas encore d'évaluation
- Guia LiderazgoDocument6 pagesGuia LiderazgokathyPas encore d'évaluation
- Guiaq InstDocument5 pagesGuiaq InstMarco ChiluizaPas encore d'évaluation
- CajaDocument2 pagesCajaMarco ChiluizaPas encore d'évaluation
- Carta A García Por Marco ChiluizaDocument2 pagesCarta A García Por Marco ChiluizaMarco ChiluizaPas encore d'évaluation
- Informe MohoDocument3 pagesInforme MohoVictor LaraPas encore d'évaluation
- Modelaje y Optimización PEC3Document14 pagesModelaje y Optimización PEC3Guadalupe Borreguero HerráizPas encore d'évaluation
- FT Beryl - Rev05Document1 pageFT Beryl - Rev05Oscar Alcides Cardenas AlarconPas encore d'évaluation
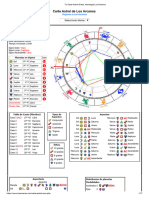
- Tu Carta Astral Gratis, Astrologia Los ArcanosDocument17 pagesTu Carta Astral Gratis, Astrologia Los ArcanosYESIKA NALLELY AGUDELO MUÑOZPas encore d'évaluation
- Sesión12 - Balance Hídrico - Sembrando AguaDocument12 pagesSesión12 - Balance Hídrico - Sembrando AguaJairo Janampa DelgadoPas encore d'évaluation
- Trastorno Cognitivo Leve (Alzheimer)Document11 pagesTrastorno Cognitivo Leve (Alzheimer)José Ramón Rodríguez BajoPas encore d'évaluation
- A-05 Expresion Genica Corto (2da Parte)Document48 pagesA-05 Expresion Genica Corto (2da Parte)OSMAR ZARATE LOPEZPas encore d'évaluation
- Producto Tecnica MasticDocument3 pagesProducto Tecnica MasticGuille2086Pas encore d'évaluation
- 02 - Malla Trasnformacion de Alimentos - EFC-28-10-2018 PDFDocument166 pages02 - Malla Trasnformacion de Alimentos - EFC-28-10-2018 PDFolvisPas encore d'évaluation
- Lectura Semana 6Document6 pagesLectura Semana 6MIGUEL JAVIER FLORENTINO FERNANDEZPas encore d'évaluation
- Ulises Lain Romero PérezDocument2 pagesUlises Lain Romero PérezandreaPas encore d'évaluation
- Anatomía y Fisiología Del Sistema Nervioso CentralDocument6 pagesAnatomía y Fisiología Del Sistema Nervioso CentralTatiana AriasPas encore d'évaluation
- Ejercicios de Termodinámica IIDocument5 pagesEjercicios de Termodinámica IISara AguirrePas encore d'évaluation
- 2016-03 Top Value Computing v1 PDFDocument24 pages2016-03 Top Value Computing v1 PDFJaime TraverPas encore d'évaluation
- INFOGRAFIA Merged Compressed PDFDocument5 pagesINFOGRAFIA Merged Compressed PDFAguilar Roman AzulPas encore d'évaluation
- Laboratorio de FenomenosDocument24 pagesLaboratorio de FenomenosFrank Lima GomezPas encore d'évaluation
- Taller - Aplicación - Del - Sistema - Métrico - Decimal PDFDocument4 pagesTaller - Aplicación - Del - Sistema - Métrico - Decimal PDFDiego VanegasPas encore d'évaluation
- Diseño de mezcla de concreto hidráulico para 270 kg/cm2Document11 pagesDiseño de mezcla de concreto hidráulico para 270 kg/cm2Nitram Lopez TlehuactlePas encore d'évaluation
- ARITfraccDocument5 pagesARITfraccLuis CañasPas encore d'évaluation
- Topografía II Construcciones GeometricasDocument15 pagesTopografía II Construcciones GeometricasHoracio Gabriel Soto SantiagoPas encore d'évaluation
- Asignatura Ciclo Semestre Academico: Cirugia Ii: X: 2021 - IIDocument69 pagesAsignatura Ciclo Semestre Academico: Cirugia Ii: X: 2021 - IIkevin antonio garay guerreroPas encore d'évaluation
- Comparación Descartes HumeDocument2 pagesComparación Descartes HumeMercedes Urdaniz ZalbaPas encore d'évaluation
- Serie verbalDocument44 pagesSerie verbalDaniel RPas encore d'évaluation
- Segmentación de La Población ObjetivaDocument3 pagesSegmentación de La Población ObjetivaDANIELA BOCANGEL SALASPas encore d'évaluation
- Ciclo de KrebsDocument9 pagesCiclo de Krebsapi-235957287Pas encore d'évaluation
- Trabajo de Proteinas Metodos Kjeldahl y DumasDocument33 pagesTrabajo de Proteinas Metodos Kjeldahl y DumasMISAEL LAURA TITOPas encore d'évaluation
- AIEPIDocument107 pagesAIEPIKari AndreaPas encore d'évaluation
- Verdadera HombriaDocument2 pagesVerdadera HombriaJuan Morales GarcíaPas encore d'évaluation