Vous aimerez peut-être aussi
- Armónicas en Sistemas Eléctricos IndustrialesD'EverandArmónicas en Sistemas Eléctricos IndustrialesÉvaluation : 4.5 sur 5 étoiles4.5/5 (12)
- Practica 1Document16 pagesPractica 1masterchief182Pas encore d'évaluation
- Amplificador Operacional ComparadorDocument10 pagesAmplificador Operacional ComparadorArtur RodriPas encore d'évaluation
- Amplificadores OperacionalesDocument10 pagesAmplificadores OperacionalesAxel De PapelPas encore d'évaluation
- Trabajo Final OpampsDocument52 pagesTrabajo Final OpampsFrancisco OrdazPas encore d'évaluation
- Laboratorio III - Proceso Lineal de Primer OrdenDocument16 pagesLaboratorio III - Proceso Lineal de Primer OrdenbmsantivañezPas encore d'évaluation
- Taller 1Document12 pagesTaller 1Juan MartinezPas encore d'évaluation
- Ejercicio 2Document14 pagesEjercicio 2Marcos Augusto Durango ArrietaPas encore d'évaluation
- Sensor de AnguloDocument12 pagesSensor de AnguloliflofyliPas encore d'évaluation
- PRACTICA 5 y 6Document27 pagesPRACTICA 5 y 6CRISTIAN QUIROZ SANCHEZPas encore d'évaluation
- Informe-6-Lab Electronicos 2Document15 pagesInforme-6-Lab Electronicos 2Nando AlarconPas encore d'évaluation
- Reporte Tema 3 PDFDocument22 pagesReporte Tema 3 PDFUriel Ríos GarcíaPas encore d'évaluation
- Amplificador MultiplicadorDocument13 pagesAmplificador MultiplicadorDimas Enrique Avendaño Yañez67% (3)
- Amplificador Operacional Clases y AplicacionesDocument18 pagesAmplificador Operacional Clases y AplicacionesDaniel GuillenPas encore d'évaluation
- Practica 1 (Reporte)Document9 pagesPractica 1 (Reporte)josePas encore d'évaluation
- Práctica 5 Seguidor - Sum - ResDocument20 pagesPráctica 5 Seguidor - Sum - Resdiegofer90100Pas encore d'évaluation
- PRAC1MARISOLDocument20 pagesPRAC1MARISOLBrian GonzalezPas encore d'évaluation
- Laboratorio 1 - S. Electronicos de PotenciaDocument21 pagesLaboratorio 1 - S. Electronicos de PotenciaANGEL MAURICIO SARMIENTO ZARZOSAPas encore d'évaluation
- Convertidor Tensión A CorrienteDocument14 pagesConvertidor Tensión A CorrienteArmando VizOrPas encore d'évaluation
- Inf Lab Circuitos ADocument17 pagesInf Lab Circuitos AEnrique AtencioPas encore d'évaluation
- Práctica 1 - SE - Unidad 2Document12 pagesPráctica 1 - SE - Unidad 2Sergio Armando EsparzaPas encore d'évaluation
- Fuentes de Corriente y Traslado de NivelDocument38 pagesFuentes de Corriente y Traslado de NivelJesus Gallardo RamirezPas encore d'évaluation
- Amp Con Opreracional y Salida CuasicomplementarioDocument79 pagesAmp Con Opreracional y Salida CuasicomplementarioFabio LopezPas encore d'évaluation
- Simulacion Amplificador OperacionalDocument17 pagesSimulacion Amplificador OperacionalEmili BetancourtPas encore d'évaluation
- Lab 03Document6 pagesLab 03Israel Silvestre Aguilar QuispePas encore d'évaluation
- Lab02 Circuitos ComparadoresDocument14 pagesLab02 Circuitos ComparadoresJodin Rosales EspinozaPas encore d'évaluation
- Amplificador Operacional para ImprimirDocument15 pagesAmplificador Operacional para ImprimirEmilio Eduardo Gómez LópezPas encore d'évaluation
- Practica 1 ElectronicaDocument10 pagesPractica 1 ElectronicaJosue RiofrioPas encore d'évaluation
- L5 Amplificador OperacionalDocument22 pagesL5 Amplificador OperacionalJorge GustavoPas encore d'évaluation
- Amplificador OperacionalDocument16 pagesAmplificador OperacionalAlejandra Morales FloresPas encore d'évaluation
- Práctica #6 - Amp. Op. BasicosDocument13 pagesPráctica #6 - Amp. Op. BasicosDaxterMancerPas encore d'évaluation
- Laboratorio 1 Roffet - ParmaDocument12 pagesLaboratorio 1 Roffet - ParmanicopaterpinchaPas encore d'évaluation
- Amplificador InversorDocument7 pagesAmplificador InversorGarcía Rodríguez Valeria IvonnePas encore d'évaluation
- Caracteristicas de Los Amp - OpsDocument6 pagesCaracteristicas de Los Amp - OpsMiguel Vallejo HuertaPas encore d'évaluation
- Fuente ConmutadaDocument15 pagesFuente ConmutadaDaniel HernándezPas encore d'évaluation
- Prac4 LabDocument8 pagesPrac4 Labmnolasco2010Pas encore d'évaluation
- Modelado de Sistemas Con Amplificadores OperacionalesDocument10 pagesModelado de Sistemas Con Amplificadores Operacionalesfelipe de jesus López SotoPas encore d'évaluation
- Circuito Regulador de VoltajeDocument9 pagesCircuito Regulador de VoltajeJavierPas encore d'évaluation
- S06.s1Laboratorio 01amplificador de Simetria ComplementariaDocument20 pagesS06.s1Laboratorio 01amplificador de Simetria ComplementariaDIEGO ESTEFANO PICHIHUA CARRERAPas encore d'évaluation
- Trabajo de InvestigacionDocument12 pagesTrabajo de InvestigacionMireya LuctualPas encore d'évaluation
- Funcion de TransferenciaDocument18 pagesFuncion de Transferenciavimpher33% (3)
- Amplificadores Operacionales.Document8 pagesAmplificadores Operacionales.Wilmer Chimborazo100% (1)
- Tema 2Document32 pagesTema 2Uriel Ríos GarcíaPas encore d'évaluation
- Experimento N 13Document18 pagesExperimento N 13Tuarr Andrés MartínPas encore d'évaluation
- Amplificadores Operacionales ObjetivosDocument7 pagesAmplificadores Operacionales ObjetivosMaria ClavelPas encore d'évaluation
- Laboratorio Simetría ComplementariaDocument12 pagesLaboratorio Simetría ComplementariaMiguel Angel100% (5)
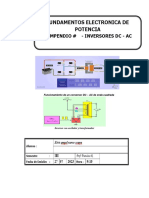
- InversorDocument13 pagesInversorElvis angel surco CcapaPas encore d'évaluation
- Fuente RegulableDocument6 pagesFuente RegulableIsrael R HdzPas encore d'évaluation
- Practica 4 Amplificador OperacionalDocument7 pagesPractica 4 Amplificador OperacionalKenshin Ancona PerezPas encore d'évaluation
- Unidad 2 Sistemas Electronicos 165Document13 pagesUnidad 2 Sistemas Electronicos 165Dann De JesusPas encore d'évaluation
- Informe 2 Circuitos AnalogicosDocument13 pagesInforme 2 Circuitos AnalogicosDaniel GiraldoPas encore d'évaluation
- Amplificadores OperacionalesDocument16 pagesAmplificadores Operacionalesmiguel macielPas encore d'évaluation
- Fuente de Voltaje AutoregulableDocument6 pagesFuente de Voltaje AutoregulableAle GonzálezPas encore d'évaluation
- Fuente de Voltaje Regulable BipolarDocument11 pagesFuente de Voltaje Regulable Bipolardillianstaine100% (1)
- VinculacionDocument4 pagesVinculacionJOSÉ ANDRÉS ORTIZ FERNANDEZPas encore d'évaluation
- Triac - Mosfet - Ujt PDFDocument6 pagesTriac - Mosfet - Ujt PDFCarlos Daniel TorresHuamanPas encore d'évaluation
- Circuitos Básicos de SensoresDocument4 pagesCircuitos Básicos de SensoresJose HernandezPas encore d'évaluation
- Sensor de HumedadDocument12 pagesSensor de HumedadJovan Ramirez GuzmanPas encore d'évaluation
- Tipos de Mezclas Asfalticas en CalienteDocument23 pagesTipos de Mezclas Asfalticas en CalienteEliezerChirinosPas encore d'évaluation
- Operaciones Unitarias. Equipos de Medicion AuxiliaresDocument23 pagesOperaciones Unitarias. Equipos de Medicion AuxiliaresAgustin Franco100% (3)
- Sistemas Auxiliares Del Motor Diese1Document8 pagesSistemas Auxiliares Del Motor Diese1Melvin BrachoPas encore d'évaluation
- Prueba Final - PrebásicaDocument3 pagesPrueba Final - PrebásicaCristian ChavezPas encore d'évaluation
- Las Bombillas y Su Impacto en El MedioDocument8 pagesLas Bombillas y Su Impacto en El MediodannPas encore d'évaluation
- Preguntas ConsolidacionDocument23 pagesPreguntas ConsolidacionEnriqee C. MedinaPas encore d'évaluation
- Flujo de Agua SubterraneaDocument12 pagesFlujo de Agua SubterraneaCarlos Saldaña ParedesPas encore d'évaluation
- Pauta Mantenimiento Maxus 2020 EneroDocument27 pagesPauta Mantenimiento Maxus 2020 EneroVanessa Nicole Beecher Guilloux0% (1)
- QGIS 2.14 UserGuide EsDocument429 pagesQGIS 2.14 UserGuide EsJosé Manuel Gutiérrez ValenzuelaPas encore d'évaluation
- PrimeGuard-CAT ES-IOM REV1 PDFDocument60 pagesPrimeGuard-CAT ES-IOM REV1 PDFHector Balvin Huaringa100% (1)
- AbrilDocument90 pagesAbrilCoordinador MantenimientoPas encore d'évaluation
- Cotizacion 2 Elevadores CDMXDocument5 pagesCotizacion 2 Elevadores CDMXMiguel L.Pas encore d'évaluation
- Formulas Básicas de EntropíaDocument4 pagesFormulas Básicas de EntropíaGASTON RIVERA MONTOYAPas encore d'évaluation
- Hoja de Trabajo 2Document5 pagesHoja de Trabajo 2Oliver CojonPas encore d'évaluation
- Manual de Operación y Mantenimiento - Camión de Acarreo Cat 793cDocument13 pagesManual de Operación y Mantenimiento - Camión de Acarreo Cat 793cErick GutierrezPas encore d'évaluation
- Ficha Sobre PotenciasDocument2 pagesFicha Sobre PotenciasDiana Elisabeth Alvarado BarrientosPas encore d'évaluation
- Ensayo de CharpyDocument8 pagesEnsayo de CharpyJuan CutimboPas encore d'évaluation
- Seminario - Grupo 5Document13 pagesSeminario - Grupo 5FRANK JESUS ROJAS GUTIERREZPas encore d'évaluation
- Fisica 2 Laboratorio 4Document23 pagesFisica 2 Laboratorio 4eren_XDPas encore d'évaluation
- Conocimiento FilosóficoDocument2 pagesConocimiento FilosóficoPame Padilla100% (1)
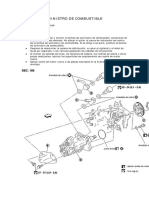
- Nissan Bomba de Suministro de CombustibleDocument25 pagesNissan Bomba de Suministro de CombustibleIsrael TomalaPas encore d'évaluation
- Elaborar El Manjar Blanco Del ValleDocument29 pagesElaborar El Manjar Blanco Del ValleLoscar Carlos LoaizaPas encore d'évaluation
- Ejercicios de CuadrilateroDocument5 pagesEjercicios de CuadrilateroWilliam EspinozaPas encore d'évaluation
- Clase 2 - Capitulo 1 PDFDocument54 pagesClase 2 - Capitulo 1 PDFMarcelo ResckPas encore d'évaluation
- Parcial de MicroprocesadoresDocument4 pagesParcial de MicroprocesadoresElmer Armando Mamani AbadPas encore d'évaluation
- Parcial 5 - Centroides 3dDocument5 pagesParcial 5 - Centroides 3dJulieth CardenasPas encore d'évaluation
- Paint Basico Visual BasicDocument5 pagesPaint Basico Visual BasicJuan Carlos Giraldo R.Pas encore d'évaluation
- Definición de Reino VegetalDocument6 pagesDefinición de Reino VegetalYuli B. MendozaPas encore d'évaluation
- Catalogo de Partes NtorqDocument73 pagesCatalogo de Partes NtorqFrank David Duarte Salamanca100% (1)
- Manual de Uso DVR-FUHODocument7 pagesManual de Uso DVR-FUHOrickylimaperuPas encore d'évaluation