Vous aimerez peut-être aussi
- 5.1 Definicion de Transformación LinealDocument4 pages5.1 Definicion de Transformación LinealGABRIEL AGUILAR RAMIREZPas encore d'évaluation
- Unidad 5 Transformaciones LinealesDocument16 pagesUnidad 5 Transformaciones LinealesMiathzireri Reyes100% (1)
- Unidades conversión redondeo cifrasDocument2 pagesUnidades conversión redondeo cifrasMitchel Alemán PavónPas encore d'évaluation
- 1.6 Ecuaciones PolinomicasDocument2 pages1.6 Ecuaciones Polinomicasmaikvai100% (1)
- 5.1 Introducción A Las Transformaciones Lineales.Document15 pages5.1 Introducción A Las Transformaciones Lineales.Maritza GuadalupePas encore d'évaluation
- 2.1. Conceptos Básicos.: Unidad 2 Estatica de La ParticulaDocument21 pages2.1. Conceptos Básicos.: Unidad 2 Estatica de La ParticulaCRISTIAN GUADALUPE VASQUEZ CHIGOPas encore d'évaluation
- Modulo y ArgumentoDocument3 pagesModulo y ArgumentoViviana CelliPas encore d'évaluation
- Traslacion y RotacionDocument7 pagesTraslacion y RotacionING. GUSTAVO HERRERA CONTRERASPas encore d'évaluation
- Unidad 5 Calculo DiferencialDocument20 pagesUnidad 5 Calculo Diferencialaerodomo100% (2)
- Matemáticas III: Producto escalar y vectorialDocument7 pagesMatemáticas III: Producto escalar y vectorialLeo GarciaPas encore d'évaluation
- Propiedades de los determinantes matemáticosDocument3 pagesPropiedades de los determinantes matemáticosAraceli AvellanedaPas encore d'évaluation
- Unidad 3 Introducción A La ÓpticaDocument11 pagesUnidad 3 Introducción A La ÓpticaIsai HernandezPas encore d'évaluation
- Act2 t2Document16 pagesAct2 t2Knd Gmz ChvzPas encore d'évaluation
- Conceptos Basicos - Unidad-2 - Estudio Del Trabajo-1Document13 pagesConceptos Basicos - Unidad-2 - Estudio Del Trabajo-1ALONSO GUTIERREZ AGUASPas encore d'évaluation
- Representacion Matricial de Una Transformacion LinealDocument2 pagesRepresentacion Matricial de Una Transformacion LinealsuaPas encore d'évaluation
- Esquema Mexicano de NormalizaciónDocument1 pageEsquema Mexicano de NormalizaciónLuis MoralesPas encore d'évaluation
- Procesos para fabricar aceros y sus aleacionesDocument24 pagesProcesos para fabricar aceros y sus aleacionesARACELI VALERIA CALVO RAMIREZPas encore d'évaluation
- Algebra LinealDocument9 pagesAlgebra LinealKassandra PQPas encore d'évaluation
- Núcleo e imagen de una transformación lineal: menos deDocument2 pagesNúcleo e imagen de una transformación lineal: menos deBaby Home100% (1)
- DefiniciónSubespacioVectorialYSusPropiedadesDocument2 pagesDefiniciónSubespacioVectorialYSusPropiedadesJD EddiePas encore d'évaluation
- 1.1 Medicion Aproximada de Figuras AmorfasDocument2 pages1.1 Medicion Aproximada de Figuras AmorfasDaniell CrossPas encore d'évaluation
- 1.4 Conceptualización Sistémica de La Seg. Hig y Salud OcupacionalDocument6 pages1.4 Conceptualización Sistémica de La Seg. Hig y Salud OcupacionalJimmy de HernandezPas encore d'évaluation
- Transformaciones LinealesDocument11 pagesTransformaciones LinealesvarcePas encore d'évaluation
- Base y Dimensiones de Un Espacio VectorialDocument18 pagesBase y Dimensiones de Un Espacio VectorialCecy CruzPas encore d'évaluation
- Algebra Lineal U5Document27 pagesAlgebra Lineal U5Ignacio Chi ChucPas encore d'évaluation
- EF4 Unidad 2 Motores Transformadores y Dispositivos de ControlDocument10 pagesEF4 Unidad 2 Motores Transformadores y Dispositivos de ControlRolando WallePas encore d'évaluation
- Unidad 5 Integrales MúltiplesDocument21 pagesUnidad 5 Integrales MúltiplesMaleni ValdesPas encore d'évaluation
- Axiomas y teoremas de probabilidadDocument27 pagesAxiomas y teoremas de probabilidadjilmar_1995100% (1)
- 2.1. - Definición de Matriz, Notación y OrdenDocument3 pages2.1. - Definición de Matriz, Notación y OrdenHenry MartinezPas encore d'évaluation
- 3.5 Equilibrio de La EmpresaDocument10 pages3.5 Equilibrio de La EmpresaKikiPas encore d'évaluation
- 1.3.2-Distribuciones Categoricas Equipo #3Document16 pages1.3.2-Distribuciones Categoricas Equipo #3Daniel Velazquez100% (1)
- Calculo Integral Unidad 4Document18 pagesCalculo Integral Unidad 4Eder Joel Perez TriAnaPas encore d'évaluation
- Definición de Transformación LinealDocument120 pagesDefinición de Transformación LinealEmanuel MartinezPas encore d'évaluation
- 5.2 Movimiento CurvilineoDocument8 pages5.2 Movimiento CurvilineoMaria Fernanda Contreras BeltranPas encore d'évaluation
- Introducción a los números complejosDocument15 pagesIntroducción a los números complejosL Manuel CruzPas encore d'évaluation
- Comisiones Mixtas de Higiene Y SeguridadDocument12 pagesComisiones Mixtas de Higiene Y SeguridadМари КханPas encore d'évaluation
- 2.8 Condiciones de TrabajoDocument14 pages2.8 Condiciones de TrabajoVictor MmrPas encore d'évaluation
- Estadistica InferencialDocument10 pagesEstadistica InferencialluisitoPas encore d'évaluation
- Aplicación de Las Transformaciones LinealesDocument9 pagesAplicación de Las Transformaciones LinealesKattia Jeraldine Uitzil Yam100% (1)
- Reporte de Investigacion - Transformacion LinealDocument7 pagesReporte de Investigacion - Transformacion LinealDanna JaegerPas encore d'évaluation
- 5.1 Definición de Transformación Lineal.: Alexis Lucas Rizo Rafael Hernán Catzin G3C Algebra LinealDocument8 pages5.1 Definición de Transformación Lineal.: Alexis Lucas Rizo Rafael Hernán Catzin G3C Algebra LinealAlexis Lucas RizoPas encore d'évaluation
- Ejemplos de Transformaciones Lineales (Reflexión, Dilatación, Contracción, Rotación)Document10 pagesEjemplos de Transformaciones Lineales (Reflexión, Dilatación, Contracción, Rotación)Gustavo RamosPas encore d'évaluation
- Unidad 4" Espacios Vectoriales"Document18 pagesUnidad 4" Espacios Vectoriales"J ArmandoPas encore d'évaluation
- Aplicaciones de Series - Expo PDFDocument5 pagesAplicaciones de Series - Expo PDFleonardoPas encore d'évaluation
- Unidad 3 Electricidad y ElectronicaDocument8 pagesUnidad 3 Electricidad y ElectronicaJose Luis Castillo SanchezPas encore d'évaluation
- Ensayo Sobre SeriesDocument19 pagesEnsayo Sobre SeriesJESUS SEBASTIAN ANGEL VENTURAPas encore d'évaluation
- 3.3 Interpretación Geométrica de Las SolucionesDocument4 pages3.3 Interpretación Geométrica de Las SolucionesJulian Omar Velazquez RiosPas encore d'évaluation
- UNIDAD 4 Espacios VectorialesDocument7 pagesUNIDAD 4 Espacios VectorialesFernandaPas encore d'évaluation
- Definición Del Espacio Vectorial y Sus PropiedadesDocument4 pagesDefinición Del Espacio Vectorial y Sus PropiedadesRicardo Lopez SalazarPas encore d'évaluation
- Definicion y Ejemplos de Espacios VectorialesDocument10 pagesDefinicion y Ejemplos de Espacios VectorialesFredy Solorio100% (1)
- 2.3.3 TrigonometricasDocument10 pages2.3.3 TrigonometricasFercho Castillo ZamudioPas encore d'évaluation
- Prácticas de Valorización Del Ritmo Del Operario, Toma y Registro de TiemposDocument9 pagesPrácticas de Valorización Del Ritmo Del Operario, Toma y Registro de TiemposOscar Rodolfo Mosqueda RedondoPas encore d'évaluation
- Unidad 4 Espacios VectorialesDocument28 pagesUnidad 4 Espacios VectorialesSKEETTITT 13Pas encore d'évaluation
- Unidad 3 Estadística InferencialDocument30 pagesUnidad 3 Estadística InferencialelmerPas encore d'évaluation
- Ecuaciones Lineales Por Método GráficoDocument15 pagesEcuaciones Lineales Por Método GráficoJuanEduardoPérezPas encore d'évaluation
- Unidad 4 y 5 Algebra LinealDocument24 pagesUnidad 4 y 5 Algebra LinealMaria Fernanda Calva MorenoPas encore d'évaluation
- Expo Algebra Unidad 5Document16 pagesExpo Algebra Unidad 5René VerdaletPas encore d'évaluation
- Introducción A Las Transformaciones LinealesDocument2 pagesIntroducción A Las Transformaciones LinealesMartin Alejandro OrtizPas encore d'évaluation
- Aplicaciones de Las Transformaciones LinealesDocument17 pagesAplicaciones de Las Transformaciones Linealesfrancisco javier de la cruz reyesPas encore d'évaluation
- Introducción a las transformaciones linealesDocument18 pagesIntroducción a las transformaciones linealesStephany ScottPas encore d'évaluation
- Guía para La Elaboración Del Protocolo de InvestigaciónDocument9 pagesGuía para La Elaboración Del Protocolo de InvestigaciónSra. SonrisasPas encore d'évaluation
- G-3 Suministro de Agua Entubada en La Loc. de AhuatenoDocument20 pagesG-3 Suministro de Agua Entubada en La Loc. de Ahuatenofrancisco javier de la cruz reyesPas encore d'évaluation
- Guía para La Elaboración Del Protocolo de InvestigaciónDocument9 pagesGuía para La Elaboración Del Protocolo de InvestigaciónSra. SonrisasPas encore d'évaluation
- Como Estructurar Tu Informe Final de Residencias ProfesionalesDocument10 pagesComo Estructurar Tu Informe Final de Residencias Profesionalesmarkus298033Pas encore d'évaluation
- Proyecto Servicio Social Cursos PDFDocument2 pagesProyecto Servicio Social Cursos PDFfrancisco javier de la cruz reyesPas encore d'évaluation
- CHECK LIST RESID - PROF. Plan 2015Document1 pageCHECK LIST RESID - PROF. Plan 2015escobarPas encore d'évaluation
- Guía para La Elaboración Del Protocolo de InvestigaciónDocument9 pagesGuía para La Elaboración Del Protocolo de InvestigaciónSra. SonrisasPas encore d'évaluation
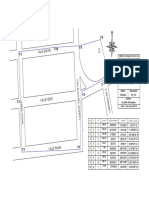
- Requisitos para FraccionamientosDocument3 pagesRequisitos para Fraccionamientosfrancisco javier de la cruz reyesPas encore d'évaluation
- G-3 Suministro de Agua Entubada en La Loc. de AhuatenoDocument20 pagesG-3 Suministro de Agua Entubada en La Loc. de Ahuatenofrancisco javier de la cruz reyesPas encore d'évaluation
- Guía para La Elaboración Del Protocolo de InvestigaciónDocument9 pagesGuía para La Elaboración Del Protocolo de InvestigaciónSra. SonrisasPas encore d'évaluation
- CHECK LIST RESID - PROF. Plan 2015Document1 pageCHECK LIST RESID - PROF. Plan 2015escobarPas encore d'évaluation
- Presentacion Curso InduccionDocument14 pagesPresentacion Curso Induccionfrancisco javier de la cruz reyesPas encore d'évaluation
- Actividad 4 Gráficos 1Document2 pagesActividad 4 Gráficos 1francisco javier de la cruz reyesPas encore d'évaluation
- Horario clases Grupos 1 y 2Document1 pageHorario clases Grupos 1 y 2francisco javier de la cruz reyesPas encore d'évaluation
- Proyecto Servicio Social Cursos PDFDocument2 pagesProyecto Servicio Social Cursos PDFfrancisco javier de la cruz reyesPas encore d'évaluation
- Esque MasDocument1 pageEsque Masfrancisco javier de la cruz reyesPas encore d'évaluation
- Presentacion Curso en Linea Servicio SocialDocument1 pagePresentacion Curso en Linea Servicio Socialfrancisco javier de la cruz reyesPas encore d'évaluation
- Resumen - de La Cruz Reyes GalileaDocument5 pagesResumen - de La Cruz Reyes Galileafrancisco javier de la cruz reyesPas encore d'évaluation
- 5.3. La Matriz de Una Transformación Lineal.Document1 page5.3. La Matriz de Una Transformación Lineal.francisco javier de la cruz reyesPas encore d'évaluation
- 1.2. - Transporte TerrestreDocument9 pages1.2. - Transporte Terrestrefrancisco javier de la cruz reyesPas encore d'évaluation
- Inv. Unidad 1. Medios ContinuosDocument16 pagesInv. Unidad 1. Medios Continuosfrancisco javier de la cruz reyesPas encore d'évaluation
- Inv. Metod Mumer U4Document13 pagesInv. Metod Mumer U4francisco javier de la cruz reyesPas encore d'évaluation
- 5.3. La Matriz de Una Transformación Lineal.Document4 pages5.3. La Matriz de Una Transformación Lineal.francisco javier de la cruz reyesPas encore d'évaluation
- Esque MasDocument1 pageEsque Masfrancisco javier de la cruz reyesPas encore d'évaluation
- Mecanica de Los Medios Continuos Unidad 1Document26 pagesMecanica de Los Medios Continuos Unidad 1mudetraPas encore d'évaluation
- Reglamento de Transito Del Estado de VeracruzDocument4 pagesReglamento de Transito Del Estado de Veracruzfrancisco javier de la cruz reyesPas encore d'évaluation
- Reglamento de Transito Del Estado de VeracruzDocument4 pagesReglamento de Transito Del Estado de Veracruzfrancisco javier de la cruz reyesPas encore d'évaluation
- Aplicaciones de Las Transformaciones LinealesDocument17 pagesAplicaciones de Las Transformaciones Linealesfrancisco javier de la cruz reyesPas encore d'évaluation
- Clasificación SUCS y AASHTO de dos muestras de sueloDocument6 pagesClasificación SUCS y AASHTO de dos muestras de sueloElvaMuroCajoPas encore d'évaluation
- Curva de Calibracion de Un Manometro BourdonDocument12 pagesCurva de Calibracion de Un Manometro Bourdongerardo pachecoPas encore d'évaluation
- Discusión #3 OscilacionesDocument19 pagesDiscusión #3 OscilacionesMarvin Vásquez0% (1)
- 09 Sección 9 - Influjos de Gas Con Lodo Base AceiteDocument26 pages09 Sección 9 - Influjos de Gas Con Lodo Base AceiteArturo VasquezPas encore d'évaluation
- Ensayos tecnológicos acero: chispa, plegado, embutición y forjaDocument10 pagesEnsayos tecnológicos acero: chispa, plegado, embutición y forjaNildaEncisoMarquezPas encore d'évaluation
- Trabajo Encargado MeteoroDocument27 pagesTrabajo Encargado MeteoroAna GarciaPas encore d'évaluation
- Magnetrón (Campos Electrmagnéticos)Document5 pagesMagnetrón (Campos Electrmagnéticos)Carlos Hortúa CalderónPas encore d'évaluation
- Límites de la mecánica clásica y principios de la relatividadDocument31 pagesLímites de la mecánica clásica y principios de la relatividadgabrielPas encore d'évaluation
- Cálculo de vigas y columnas: Fuerzas cortantes y momentos flexionantesDocument19 pagesCálculo de vigas y columnas: Fuerzas cortantes y momentos flexionantesanon_707269376Pas encore d'évaluation
- Mando FinalDocument9 pagesMando FinalYulaw Park Mook HwanPas encore d'évaluation
- Quiz 1 - Semana 3 - CB - FISICA II - (Grupo1 Santiago)Document5 pagesQuiz 1 - Semana 3 - CB - FISICA II - (Grupo1 Santiago)christiamPas encore d'évaluation
- Analisis de RetortaDocument4 pagesAnalisis de RetortaJorgito AriasPas encore d'évaluation
- Matemáticas 1° SecundariaDocument6 pagesMatemáticas 1° SecundariaLuis Eduardo Lara HenriquezPas encore d'évaluation
- Tarea de Conduccion VehicularDocument3 pagesTarea de Conduccion VehicularOrlando VelecelaPas encore d'évaluation
- Trabajo Integrador Intercicloecuaciones 1Document8 pagesTrabajo Integrador Intercicloecuaciones 1TatyTorresPas encore d'évaluation
- Temarios de Trabajos de MineralogíaDocument18 pagesTemarios de Trabajos de MineralogíaAnderson Pariona QuispePas encore d'évaluation
- Calculos para Pulpas de MineralDocument12 pagesCalculos para Pulpas de MineralJorge Castro ChamorroPas encore d'évaluation
- Vectores: magnitudes, sumas y restasDocument6 pagesVectores: magnitudes, sumas y restasCAMILO RODRIGUEZPas encore d'évaluation
- Repaso de TrigonometríaDocument13 pagesRepaso de TrigonometríaAMYNNXXXXPas encore d'évaluation
- Metodo de La Onda CinematicaDocument3 pagesMetodo de La Onda CinematicaAntonny Kuin Gomez CordovaPas encore d'évaluation
- Separata Pre 2Document21 pagesSeparata Pre 2Juan MiguelPas encore d'évaluation
- Informe Salsa de Tomate. TerminadoDocument7 pagesInforme Salsa de Tomate. TerminadoFelipePas encore d'évaluation
- SMDDocument7 pagesSMDIsabeu Cruz RiosPas encore d'évaluation
- 4.analisis Cualitativo de Cationes y AnionesDocument40 pages4.analisis Cualitativo de Cationes y AnionesJosimar Rodrigo De La Cruz ChuquimangoPas encore d'évaluation
- T3 Campo Electrico Potencial+EDocument164 pagesT3 Campo Electrico Potencial+EImanol Figuero ParrasPas encore d'évaluation
- Fase 1 - Planificación, Resolver Problemas y Ejercicios de Ecuaciones Diferenciales de Primer OrdenDocument32 pagesFase 1 - Planificación, Resolver Problemas y Ejercicios de Ecuaciones Diferenciales de Primer Ordenlorena velezPas encore d'évaluation
- Informe ElectricidadDocument8 pagesInforme ElectricidadJulián LeónPas encore d'évaluation
- Termodinámica Semana 7Document15 pagesTermodinámica Semana 7ShimplementheIhoThuRapheroPas encore d'évaluation
- Floyd - Principios de Circuitos Electricos, 2007, 8a EdDocument5 pagesFloyd - Principios de Circuitos Electricos, 2007, 8a EdIng Castillo SanchezPas encore d'évaluation