Vous aimerez peut-être aussi
- BIOMECANICA CinematicaDocument6 pagesBIOMECANICA CinematicaRainniero Mendoza0% (1)
- CLASE #1 Conceptos Basicos de Biomecanica y KinesiologiaDocument5 pagesCLASE #1 Conceptos Basicos de Biomecanica y KinesiologiaÅreanną De los Ángeles100% (1)
- Planos y ejesDocument14 pagesPlanos y ejesGabriela Osorio RodriguezPas encore d'évaluation
- ArtrokinemáticaDocument50 pagesArtrokinemáticaCarina Richter Jurczuk100% (4)
- Analisis Del Movimiento Mod 1Document6 pagesAnalisis Del Movimiento Mod 1Maryvic RuízPas encore d'évaluation
- ArtrologíaDocument25 pagesArtrologíaCarolina Paz VillarroelPas encore d'évaluation
- Sistema articular: clasificación, tipos y géneros de articulacionesDocument21 pagesSistema articular: clasificación, tipos y géneros de articulacionesMaria Julia SarinelliPas encore d'évaluation
- Guia de Estudio, Planos, Ejes, Fuerza EtcDocument8 pagesGuia de Estudio, Planos, Ejes, Fuerza Etcjosseline riveraPas encore d'évaluation
- Análisis de Un Movimiento2Document9 pagesAnálisis de Un Movimiento2Anto AlmachePas encore d'évaluation
- Análisis Del Movimiento de La Flexión Del Antebrazo Sobre El Brazo Desde La Perspectiva Anátomo FuncionalDocument5 pagesAnálisis Del Movimiento de La Flexión Del Antebrazo Sobre El Brazo Desde La Perspectiva Anátomo FuncionalFernando GalvaoPas encore d'évaluation
- El Aparato LocomotorDocument82 pagesEl Aparato LocomotorYess CantúPas encore d'évaluation
- GONIOMETRIADocument45 pagesGONIOMETRIAObed CardonaPas encore d'évaluation
- Actividad 1 - Anatomia Funcional - Graciela SosaDocument10 pagesActividad 1 - Anatomia Funcional - Graciela SosaGraciela Danahe Sosa EspañaPas encore d'évaluation
- Acondicionamento Físico: Anatomia e MovimentoDocument14 pagesAcondicionamento Físico: Anatomia e MovimentoJuan Carlos Coche TapiaPas encore d'évaluation
- ArticulacionesDocument5 pagesArticulacionesMARCO ANTONIO LANDEO HURTADOPas encore d'évaluation
- Planos CorporalesDocument26 pagesPlanos CorporalesSuelen PachecoPas encore d'évaluation
- Las ArticulacionesDocument2 pagesLas Articulacionesvanesavaca1991Pas encore d'évaluation
- Anatomia 3Document17 pagesAnatomia 3Ana Valentina Rujano VegaPas encore d'évaluation
- Artrología generalDocument6 pagesArtrología generalDaniel Chen LemusPas encore d'évaluation
- 09 - La Cintura Escapular y El Hombro PDFDocument11 pages09 - La Cintura Escapular y El Hombro PDFSai992Pas encore d'évaluation
- BiomecánicaDocument6 pagesBiomecánicaPablo Pérez VázquezPas encore d'évaluation
- Análisis Del Movimiento de La Flexión Del Antebrazo Sobre El Brazo Desde La Perspectiva Anátomo FuncionalDocument6 pagesAnálisis Del Movimiento de La Flexión Del Antebrazo Sobre El Brazo Desde La Perspectiva Anátomo FuncionalHugo Fabián LobosPas encore d'évaluation
- Biomecanica Del PieDocument5 pagesBiomecanica Del PieAngy Pris Campos M100% (1)
- Fisiologia de Muñeca y ManoDocument97 pagesFisiologia de Muñeca y ManoJonathan HerreraPas encore d'évaluation
- Articulación Del CodoDocument3 pagesArticulación Del CodoRuth Marrugo Ramos100% (1)
- Movimientos de las articulaciones del codo, muñeca y manoDocument5 pagesMovimientos de las articulaciones del codo, muñeca y manoJhonalfrer Daniel Peraza PerezPas encore d'évaluation
- GONIOMETRIADocument29 pagesGONIOMETRIAFisioterapia RehabilitaciónPas encore d'évaluation
- Proyecto Anatomia-Dennis RamosDocument20 pagesProyecto Anatomia-Dennis RamosDennis Ramos LeyvaPas encore d'évaluation
- Sistema ArticularDocument77 pagesSistema ArticulardamarsreterPas encore d'évaluation
- Biomecanica Articular IntroDocument32 pagesBiomecanica Articular IntroInnova TOPas encore d'évaluation
- Sistema ArticularDocument77 pagesSistema ArticulardamarsreterPas encore d'évaluation
- Tema 1 y 2. Introducción y Tipos de MovimientoDocument29 pagesTema 1 y 2. Introducción y Tipos de MovimientofranvakerilloPas encore d'évaluation
- Biomecanica ArticularDocument7 pagesBiomecanica Articularماريو فيجاPas encore d'évaluation
- Artrocinematica 2da ParteDocument40 pagesArtrocinematica 2da Parteoaviega67% (6)
- ArticulacionesDocument27 pagesArticulacionesDalmiro NarvaezPas encore d'évaluation
- Sesion 3 Sistema Articular IDocument86 pagesSesion 3 Sistema Articular IAndy QuijanoPas encore d'évaluation
- Las Articulaciones y Sus Movimientos PDFDocument12 pagesLas Articulaciones y Sus Movimientos PDFOrtiz Catalina100% (5)
- Tipos de MovimientosDocument18 pagesTipos de MovimientosAndrea JaramilloPas encore d'évaluation
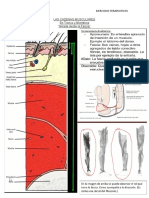
- Las Cadenas MuscularesDocument18 pagesLas Cadenas Muscularesnicolás suazoPas encore d'évaluation
- Generalides - Ejes El CuerpoDocument6 pagesGeneralides - Ejes El CuerpoLuis Ricardo Saldaña NavarroPas encore d'évaluation
- Miembro Superior - Generalidades de ArticulaciónDocument2 pagesMiembro Superior - Generalidades de ArticulaciónNahu SteinmannPas encore d'évaluation
- Planos y Ejes Del Cuerpo HumanoDocument27 pagesPlanos y Ejes Del Cuerpo Humanoquispewendy880Pas encore d'évaluation
- Biomecanica - Fisica Nuevo-3Document35 pagesBiomecanica - Fisica Nuevo-3agostina agueroPas encore d'évaluation
- Articulaciones Del Cuerpo HumanoDocument20 pagesArticulaciones Del Cuerpo HumanoMichelle VásquezPas encore d'évaluation
- Art Rolo GiaDocument28 pagesArt Rolo GiaRonny Ibarra RasguidoPas encore d'évaluation
- 09 Cintura Escap HombroDocument11 pages09 Cintura Escap HombroduedanielPas encore d'évaluation
- ArticulacionesDocument14 pagesArticulacionesGabrielle AlcalaPas encore d'évaluation
- Planos Anatómicos y Movimientos en AnatomíaDocument6 pagesPlanos Anatómicos y Movimientos en AnatomíaBlANCAPas encore d'évaluation
- Palancas y ArticulacionesDocument7 pagesPalancas y ArticulacionesFisioterapia pde2022Pas encore d'évaluation
- Artrocinematica y Osteocinematica de Articulacion de CodoDocument30 pagesArtrocinematica y Osteocinematica de Articulacion de CodoSoorii Zuri Sam0% (2)
- Bloque 2. Bases Generales de La CinesiologíaDocument4 pagesBloque 2. Bases Generales de La CinesiologíaTulkas el fuertePas encore d'évaluation
- Cadenas CinematicasDocument3 pagesCadenas CinematicasRonald MaldonadoPas encore d'évaluation
- ArtrologíaDocument15 pagesArtrologíaMARIBEL ARROYOPas encore d'évaluation
- Repaso 1er ParcialDocument13 pagesRepaso 1er ParcialIlse HernándezPas encore d'évaluation
- Video de AnatomiaDocument3 pagesVideo de AnatomiaRenataPas encore d'évaluation
- Rodilla BiomecánicaDocument6 pagesRodilla BiomecánicaCamila Magali Ruiz PoncePas encore d'évaluation
- Sistema ArticularDocument53 pagesSistema ArticularYelka Benavente UgartePas encore d'évaluation
- Temas Evaluar AnatomiaDocument7 pagesTemas Evaluar AnatomiaFranco AveiroPas encore d'évaluation
- La tonificación muscular: Teoría y prácticaD'EverandLa tonificación muscular: Teoría y prácticaÉvaluation : 4 sur 5 étoiles4/5 (1)
- Los músculos: Anatomía clínica de las extremidades (Bicolor)D'EverandLos músculos: Anatomía clínica de las extremidades (Bicolor)Évaluation : 2 sur 5 étoiles2/5 (1)
- Arestegui SeminarioSST RiesgosPsicosociales 2012 04 24Document30 pagesArestegui SeminarioSST RiesgosPsicosociales 2012 04 24Gian VillafvertePas encore d'évaluation
- Evaluacion Ergonomicade Estacionesde Trabajoindice OCRADocument18 pagesEvaluacion Ergonomicade Estacionesde Trabajoindice OCRAergoshaunPas encore d'évaluation
- JMGarciaDocument33 pagesJMGarciaergoshaunPas encore d'évaluation
- Tes Is Track in 2016Document85 pagesTes Is Track in 2016ergoshaunPas encore d'évaluation
- Tamaño y VidaDocument13 pagesTamaño y VidaergoshaunPas encore d'évaluation
- Rev Angulo-Aquiles 173 42Document8 pagesRev Angulo-Aquiles 173 42ergoshaunPas encore d'évaluation
- Artículo Plantillas InstrumentadasDocument8 pagesArtículo Plantillas InstrumentadasergoshaunPas encore d'évaluation
- Biomecánica Del Movimiento Humano 1Document29 pagesBiomecánica Del Movimiento Humano 1ergoshaunPas encore d'évaluation