Vous aimerez peut-être aussi
- 7 Design Root LocusDocument31 pages7 Design Root LocusDogukan KarabeyinPas encore d'évaluation
- 351 - 27435 - EE419 - 2020 - 1 - 2 - 1 - 14 EE419 Lec14 Jury StabilityDocument39 pages351 - 27435 - EE419 - 2020 - 1 - 2 - 1 - 14 EE419 Lec14 Jury Stabilityyoussef hossamPas encore d'évaluation
- Process Modeling and Control (PMC) : Time Delay SystemsDocument19 pagesProcess Modeling and Control (PMC) : Time Delay SystemszubairlatifPas encore d'évaluation
- Week 5 Structures of Discrete ControllerDocument45 pagesWeek 5 Structures of Discrete ControllerMetin DurmuşPas encore d'évaluation
- Mobile Robot Kinematics Differential Drive: Week 5Document21 pagesMobile Robot Kinematics Differential Drive: Week 5Son TrinhPas encore d'évaluation
- TVTIx Chapter7 EACT631 AdaptiveControlMDocument33 pagesTVTIx Chapter7 EACT631 AdaptiveControlMabata yohannesPas encore d'évaluation
- Control Lec 6Document36 pagesControl Lec 6marivull2811Pas encore d'évaluation
- Control Lec 5Document36 pagesControl Lec 5aam5112002Pas encore d'évaluation
- Session 1 Day 4Document26 pagesSession 1 Day 4Guivis ZeufackPas encore d'évaluation
- Space Space ModelDocument31 pagesSpace Space ModelGabriel VianaPas encore d'évaluation
- Openfoam Case Study: Flat Plate ResistanceDocument22 pagesOpenfoam Case Study: Flat Plate ResistancejasonhaungPas encore d'évaluation
- T7 - State Feedback Analysis and Design - 2021Document35 pagesT7 - State Feedback Analysis and Design - 2021James ChanPas encore d'évaluation
- Conical Tank With DEADBEAT ControllerDocument26 pagesConical Tank With DEADBEAT ControllerShivankyJaiswalPas encore d'évaluation
- Pattern Classification 11. Backpropagation & Time-Series ForecastingDocument78 pagesPattern Classification 11. Backpropagation & Time-Series ForecastingMostafa MohamedPas encore d'évaluation
- CH 3Document91 pagesCH 3wehabekodaPas encore d'évaluation
- Basic Maths For Civil Engineering - Sandeep JyaniDocument45 pagesBasic Maths For Civil Engineering - Sandeep JyaniVenkata RamanaPas encore d'évaluation
- Learning Long-Term Dependencies With RNNDocument8 pagesLearning Long-Term Dependencies With RNNMd selimPas encore d'évaluation
- Vibrations ME400Document32 pagesVibrations ME400Nick MezaPas encore d'évaluation
- 03 - Linear Time Invariant SystemsDocument47 pages03 - Linear Time Invariant Systems21-101162Pas encore d'évaluation
- KTDKTD Chuong3 IUH EngDocument65 pagesKTDKTD Chuong3 IUH Engphamhoangviet1617Pas encore d'évaluation
- 03 Linear ModelsDocument46 pages03 Linear Modelshmiida tfmPas encore d'évaluation
- Sistem Kendali Digital - Week 2-1-1Document35 pagesSistem Kendali Digital - Week 2-1-1Dedi BobPas encore d'évaluation
- Lecture - 02 - 03 - Discrete Time Signals - 2.1-2.4 PDFDocument43 pagesLecture - 02 - 03 - Discrete Time Signals - 2.1-2.4 PDFRakhmeen gulPas encore d'évaluation
- Week 6 Design of Discrete ControllersDocument85 pagesWeek 6 Design of Discrete ControllersMetin DurmuşPas encore d'évaluation
- Solution of Swing Equation: Home Work - 2. Euler Method: Home Work - 3. Modified Euler MethodDocument10 pagesSolution of Swing Equation: Home Work - 2. Euler Method: Home Work - 3. Modified Euler MethodK.R.Sampath kumarPas encore d'évaluation
- Schrödinger Equation, Operators, EtcDocument22 pagesSchrödinger Equation, Operators, EtcJMPas encore d'évaluation
- Week1a ControlDocument73 pagesWeek1a ControlRizwanPas encore d'évaluation
- Lec. No. 07 Control (14 May 2020)Document15 pagesLec. No. 07 Control (14 May 2020)Ali MadridPas encore d'évaluation
- CV - 11 Supervised LearningDocument39 pagesCV - 11 Supervised Learningarbong007Pas encore d'évaluation
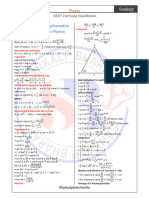
- Physics Formula HandbookDocument54 pagesPhysics Formula Handbook3198chethaPas encore d'évaluation
- Optimum Linear Filter (Part II)Document27 pagesOptimum Linear Filter (Part II)zhitao wangPas encore d'évaluation
- Mlfa Autumn 23 OptimizationDocument37 pagesMlfa Autumn 23 OptimizationT MPas encore d'évaluation
- FYP PresentationDocument81 pagesFYP PresentationTarek Bmr100% (1)
- Pres08 State-Feedback NewDocument33 pagesPres08 State-Feedback NewMahmudul HasanPas encore d'évaluation
- Day 3 - Single Image OrientationDocument22 pagesDay 3 - Single Image OrientationAarthi shreePas encore d'évaluation
- Walter SimulationDocument19 pagesWalter SimulationJohndoePas encore d'évaluation
- EE435 Chapter2 Lec2 PID+State-Space A.HaddadDocument9 pagesEE435 Chapter2 Lec2 PID+State-Space A.HaddadIbrahim abdoPas encore d'évaluation
- Gain & Phase Margin - Bode PlotDocument28 pagesGain & Phase Margin - Bode PlotDeepthiPas encore d'évaluation
- Class31.04.01.2024 WNDocument23 pagesClass31.04.01.2024 WNEslam UsamaPas encore d'évaluation
- Class34.04.08.2024 WNDocument18 pagesClass34.04.08.2024 WNEslam UsamaPas encore d'évaluation
- EE330 Digital Signal Processing: Discrete Time Signals and SystemsDocument17 pagesEE330 Digital Signal Processing: Discrete Time Signals and SystemsNihal AhmadPas encore d'évaluation
- Calculus: I. Limit and Continuity of FunctionsDocument25 pagesCalculus: I. Limit and Continuity of FunctionsALOK SHARMAPas encore d'évaluation
- 4.1 - Analysis Based On Transfer FunctionDocument56 pages4.1 - Analysis Based On Transfer FunctionMarceloPas encore d'évaluation
- Class32.04.03.2024 WNDocument26 pagesClass32.04.03.2024 WNEslam UsamaPas encore d'évaluation
- Notes Formulas TestsDocument7 pagesNotes Formulas TestsGfdileonlinePas encore d'évaluation
- T5 - Stability and Steady State Error - 2021Document43 pagesT5 - Stability and Steady State Error - 2021James ChanPas encore d'évaluation
- Super Regenerative ReceiversDocument21 pagesSuper Regenerative ReceiversAyoub KamalPas encore d'évaluation
- Week1a ControlDocument73 pagesWeek1a Controlarunkumar SPas encore d'évaluation
- 14.camera CalibrationDocument25 pages14.camera CalibrationUsman MaqboolPas encore d'évaluation
- 6 Root LocusDocument52 pages6 Root LocusDogukan KarabeyinPas encore d'évaluation
- Machine Learning Basics Lecture 3 PerceptronDocument33 pagesMachine Learning Basics Lecture 3 PerceptronbarisPas encore d'évaluation
- CPCU 520 Chapter 7 - Actuarial Operations Formula SheetDocument2 pagesCPCU 520 Chapter 7 - Actuarial Operations Formula SheetasdfsdfPas encore d'évaluation
- 9 - ParameterizationDocument48 pages9 - Parameterizationandriusjaya787Pas encore d'évaluation
- Stream CipherDocument17 pagesStream CipherhardisnetworkPas encore d'évaluation
- T4 - Time Response and Feedback Control System Characteristices - 2021Document38 pagesT4 - Time Response and Feedback Control System Characteristices - 2021James ChanPas encore d'évaluation
- Dibujov 1Document1 pageDibujov 1Efra IbacetaPas encore d'évaluation
- New 3 PDFDocument1 pageNew 3 PDFEfra IbacetaPas encore d'évaluation
- Machine Side Grid Side: Circulating CurrentsDocument1 pageMachine Side Grid Side: Circulating CurrentsEfra IbacetaPas encore d'évaluation
- DigikeyDocument9 pagesDigikeyEfra IbacetaPas encore d'évaluation
- Proposed FOC 4Document1 pageProposed FOC 4Efra IbacetaPas encore d'évaluation
- IM IM: Optimal Switching Logical Voltage Calculator Adaptative Dynamic ModelDocument1 pageIM IM: Optimal Switching Logical Voltage Calculator Adaptative Dynamic ModelEfra IbacetaPas encore d'évaluation
- M3C PCIM2012 KammererDocument8 pagesM3C PCIM2012 KammererEfra IbacetaPas encore d'évaluation
- Renca 30 Del 12Document1 pageRenca 30 Del 12Efra IbacetaPas encore d'évaluation
- Direct Torque Control - A Survey: Ieee Transactions On Industrial ElectronicsDocument2 pagesDirect Torque Control - A Survey: Ieee Transactions On Industrial ElectronicsEfra IbacetaPas encore d'évaluation
- Hoja de Datos Diodos ZENER - 1N4728A Hasta 1N4764A - Exp4Document6 pagesHoja de Datos Diodos ZENER - 1N4728A Hasta 1N4764A - Exp4Efra IbacetaPas encore d'évaluation
- PDFDocument282 pagesPDFEfra IbacetaPas encore d'évaluation
- Allen BradleyDocument36 pagesAllen BradleyotrepaloPas encore d'évaluation
- Technical InformationDocument8 pagesTechnical Informationmyusuf_engineerPas encore d'évaluation
- Export Dataset To PDF in ASP NetDocument2 pagesExport Dataset To PDF in ASP NetWilliamPas encore d'évaluation
- GAMS TutorialDocument28 pagesGAMS TutorialWendy Tie Kai SingPas encore d'évaluation
- Investigate The Natural Time Period, Base Shear, Displacement, Story Drift, Story Stiffness by Etabs and Staad ProDocument4 pagesInvestigate The Natural Time Period, Base Shear, Displacement, Story Drift, Story Stiffness by Etabs and Staad ProEditor IJTSRDPas encore d'évaluation
- Parts Catalog: F Y 8 - 3 1 F X - 0 0 0Document86 pagesParts Catalog: F Y 8 - 3 1 F X - 0 0 0julian gonzalezPas encore d'évaluation
- A Review Paper On Effect of Varying Welding Heat Input On Microstructure, Mech Properties and Corrosion Behaviors of Ferritic SS & Mild Steel PDFDocument5 pagesA Review Paper On Effect of Varying Welding Heat Input On Microstructure, Mech Properties and Corrosion Behaviors of Ferritic SS & Mild Steel PDFMursidil KamilPas encore d'évaluation
- 462116-01 AA - 1510 Excel ESI Command Codes Addendum - 10 Feb 2009Document103 pages462116-01 AA - 1510 Excel ESI Command Codes Addendum - 10 Feb 2009quyenducqdc100% (1)
- Da10 Air Cooled Engine (Appn Code D3.2007 & D3Document26 pagesDa10 Air Cooled Engine (Appn Code D3.2007 & D3Sandeep NikhilPas encore d'évaluation
- Data SheetDocument2 pagesData SheetAsalamEilujPas encore d'évaluation
- Oilon 4A Monox en StandardDocument16 pagesOilon 4A Monox en StandardWilbert Consuelo CotrinaPas encore d'évaluation
- 20W40 MSDSDocument2 pages20W40 MSDSAbhinav SrivastavaPas encore d'évaluation
- Códigos de Falhas Hyundai R3607ADocument13 pagesCódigos de Falhas Hyundai R3607AGuemep GuemepPas encore d'évaluation
- Fracture in Concrete and Reinforced ConcreteDocument23 pagesFracture in Concrete and Reinforced ConcreteNilay GandhiPas encore d'évaluation
- Master Antenna Television System and Satellite SystemDocument6 pagesMaster Antenna Television System and Satellite SystemMHEP_DANIELPas encore d'évaluation
- Presented By:: Rafi Sheikh Sheeraz Malik Syed Ahmed Ali Umair Ali Waqar AmeenDocument34 pagesPresented By:: Rafi Sheikh Sheeraz Malik Syed Ahmed Ali Umair Ali Waqar AmeenSyed Ahmed AliPas encore d'évaluation
- Exception Handling Notes For Vtu StudentsDocument42 pagesException Handling Notes For Vtu StudentshelloPas encore d'évaluation
- PSC Girder MethodologyDocument12 pagesPSC Girder MethodologySaurabh KumarPas encore d'évaluation
- TSA Surface Preparation and ApplicationDocument7 pagesTSA Surface Preparation and ApplicationMythri Metallizing Pvt Ltd Projects100% (1)
- Production ManagementDocument81 pagesProduction ManagementrrathorePas encore d'évaluation
- Supercontryx®: Innovative Glass For X - Ray ProtectionDocument2 pagesSupercontryx®: Innovative Glass For X - Ray ProtectionUsman AhmedPas encore d'évaluation
- Brother Dr420 Drum ResetDocument1 pageBrother Dr420 Drum ResetJaime RiosPas encore d'évaluation
- Mitsubishi 4g13 Engine ManualDocument6 pagesMitsubishi 4g13 Engine ManualJose Luis Caceres Severino100% (1)
- Thermophysical Properties of Containerless Liquid Iron Up To 2500 KDocument10 pagesThermophysical Properties of Containerless Liquid Iron Up To 2500 KJose Velasquez TeranPas encore d'évaluation
- VORON2.2 ManualDocument120 pagesVORON2.2 ManualSsZzliMmPas encore d'évaluation
- 11i APC Imp GuideDocument108 pages11i APC Imp GuidePrashanth ReddyPas encore d'évaluation
- Maintenence SchedulingDocument4 pagesMaintenence SchedulingCarloVanZyl0% (1)
- VocationalDocument2 pagesVocationalMegha RoyPas encore d'évaluation
- Powerware 5110 UPS User's ManualDocument14 pagesPowerware 5110 UPS User's ManualjulbfuPas encore d'évaluation
- First-Man-Up User ManualDocument24 pagesFirst-Man-Up User ManualJoshuaPas encore d'évaluation