Vous aimerez peut-être aussi
- A Deep Neural Network For Image Quality AssessmentDocument5 pagesA Deep Neural Network For Image Quality Assessmentgitov13916Pas encore d'évaluation
- Robust PDF Table Locator: CS 229 Machine Learning Stanford UniversityDocument6 pagesRobust PDF Table Locator: CS 229 Machine Learning Stanford UniversitySiddharth DiwanPas encore d'évaluation
- Pveerina FinalDocument5 pagesPveerina FinalAbbyPas encore d'évaluation
- A CNN-Based Fingerprint Image QualityDocument9 pagesA CNN-Based Fingerprint Image Qualitysaransh123007Pas encore d'évaluation
- Towards_Better_Understanding_of_SAR_Image_Feature_Document9 pagesTowards_Better_Understanding_of_SAR_Image_Feature_prabhuPas encore d'évaluation
- DCT-BASED FULL-REFERENCE COLOR IMAGE QUALITY METRICDocument6 pagesDCT-BASED FULL-REFERENCE COLOR IMAGE QUALITY METRICamardotsPas encore d'évaluation
- Kumar Marks Mou Wang Jones Cherian Akino Liu Feng Cvpr2020 SuppDocument7 pagesKumar Marks Mou Wang Jones Cherian Akino Liu Feng Cvpr2020 SuppAbhinavPas encore d'évaluation
- Recognition using Regions: A Unified Framework for Object Detection, Segmentation and ClassificationDocument8 pagesRecognition using Regions: A Unified Framework for Object Detection, Segmentation and ClassificationKarthikPas encore d'évaluation
- Liu Composition-Aware Image Aesthetics Assessment WACV 2020 PaperDocument10 pagesLiu Composition-Aware Image Aesthetics Assessment WACV 2020 PaperEpic ArrowPas encore d'évaluation
- Picture CollageDocument8 pagesPicture CollageLuisa Fernanda HernándezPas encore d'évaluation
- Submodular Salient Region Detection Maximizes ObjectiveDocument8 pagesSubmodular Salient Region Detection Maximizes ObjectiveAndrada CirneanuPas encore d'évaluation
- A Novel Approach For Visual Saliency Detection and Segmentation - PDFDocument5 pagesA Novel Approach For Visual Saliency Detection and Segmentation - PDFRajithPas encore d'évaluation
- 07552997Document6 pages07552997zwx8981Pas encore d'évaluation
- Invariant Features From Interest Point GroupsDocument10 pagesInvariant Features From Interest Point GroupsNitin RamchandaniPas encore d'évaluation
- Spatial Feat EmbeddingDocument4 pagesSpatial Feat Embeddingmartin_321Pas encore d'évaluation
- Fast Multi Region Image Segmentation Using Statistical Active ContoursDocument1 pageFast Multi Region Image Segmentation Using Statistical Active ContoursAnonymous 1aqlkZPas encore d'évaluation
- InvariantFeaturesFromInterestPointGroups Brown2002 PDFDocument10 pagesInvariantFeaturesFromInterestPointGroups Brown2002 PDFpjenazabrijanjePas encore d'évaluation
- 15 SPL PcqiDocument4 pages15 SPL PcqiRasool ReddyPas encore d'évaluation
- A Combined Model of Bayesian Network and Spatial Markov Kernel For Multiclass Image Segmentation and CategorizationDocument4 pagesA Combined Model of Bayesian Network and Spatial Markov Kernel For Multiclass Image Segmentation and CategorizationIJMERPas encore d'évaluation
- Cnnbasics 171028092801Document43 pagesCnnbasics 171028092801jayasanthiPas encore d'évaluation
- Evaluating The Performance of Content-Based Image Retrieval SystemsDocument12 pagesEvaluating The Performance of Content-Based Image Retrieval SystemsLuke WalkerPas encore d'évaluation
- An Implementation of K-Means Clustering For Efficient Image SegmentationDocument10 pagesAn Implementation of K-Means Clustering For Efficient Image SegmentationMohan EllappanPas encore d'évaluation
- Unsupervised Image Segmentation by Backpropagation: Asako KanezakiDocument5 pagesUnsupervised Image Segmentation by Backpropagation: Asako KanezakiUnaixa KhanPas encore d'évaluation
- Feature CombinationsDocument5 pagesFeature Combinationssatishkumar697Pas encore d'évaluation
- G H F I S P N M U: Enerating IGH Idelity Mages With Ubscale Ixel Etworks AND Ultidimensional PscalingDocument14 pagesG H F I S P N M U: Enerating IGH Idelity Mages With Ubscale Ixel Etworks AND Ultidimensional PscalingyyscribdPas encore d'évaluation
- An Edge Distortion and CNN-based Analysis of Blind IQDocument18 pagesAn Edge Distortion and CNN-based Analysis of Blind IQLavanyaPas encore d'évaluation
- RnD Project Generates Diabetic Retinopathy ImagesDocument10 pagesRnD Project Generates Diabetic Retinopathy ImagesSaipavanesh GuggilapuPas encore d'évaluation
- RA-Depth: Resolution Adaptive Self-Supervised Monocular Depth EstimationDocument17 pagesRA-Depth: Resolution Adaptive Self-Supervised Monocular Depth EstimationPengZai ZhongPas encore d'évaluation
- Towards A Hybrid Approach of K-Means and Density-Based Spatial Clustering of Applications With Noise For Image SegmentationDocument4 pagesTowards A Hybrid Approach of K-Means and Density-Based Spatial Clustering of Applications With Noise For Image SegmentationMuhammad MuhajirPas encore d'évaluation
- Computers & Graphics: Yun Zhang, Fang-Lue Zhang, Yu-Kun Lai, Zhe ZhuDocument10 pagesComputers & Graphics: Yun Zhang, Fang-Lue Zhang, Yu-Kun Lai, Zhe Zhumy familyPas encore d'évaluation
- IISDocument10 pagesIISPetko PetkovskiPas encore d'évaluation
- Zero-Reference Deep Curve Estimation for Real-Time Low-Light Image EnhancementDocument10 pagesZero-Reference Deep Curve Estimation for Real-Time Low-Light Image EnhancementTrisha DasPas encore d'évaluation
- cvpr06 3dreconstructionindoorDocument8 pagescvpr06 3dreconstructionindoordixade1732Pas encore d'évaluation
- Abstract:: Jia Yan, Jie Li, Xin FuDocument15 pagesAbstract:: Jia Yan, Jie Li, Xin FuVINEET GALAPas encore d'évaluation
- Romanian Academy Proceedings Image SegmentationDocument7 pagesRomanian Academy Proceedings Image SegmentationAl C JrPas encore d'évaluation
- Contour Detection and Hierarchical Image SegmentationDocument19 pagesContour Detection and Hierarchical Image SegmentationQuynhtrang NguyenPas encore d'évaluation
- Bottom-Up and Top-Down Attention for Image Captioning and VQADocument10 pagesBottom-Up and Top-Down Attention for Image Captioning and VQAajsocoolPas encore d'évaluation
- Chen Occlusion-Robust Object Pose Estimation With Holistic Representation WACV 2022 PaperDocument11 pagesChen Occlusion-Robust Object Pose Estimation With Holistic Representation WACV 2022 PaperTalal AhmadPas encore d'évaluation
- An SVM Based Scoring Evaluation System For Fluorescence Microscopic Image Classification-Note PDFDocument5 pagesAn SVM Based Scoring Evaluation System For Fluorescence Microscopic Image Classification-Note PDF林昌樺Pas encore d'évaluation
- 1 Low-Light Image Enhancement With Normalizing Flow 2022Document9 pages1 Low-Light Image Enhancement With Normalizing Flow 2022nguyễn hiềnPas encore d'évaluation
- Data Set Property Based K' in VDBSCAN Clustering AlgorithmDocument5 pagesData Set Property Based K' in VDBSCAN Clustering AlgorithmWorld of Computer Science and Information Technology JournalPas encore d'évaluation
- Quantum Image Processing Opportunities and ChallengesDocument8 pagesQuantum Image Processing Opportunities and ChallengesWFH2020 UdinusPas encore d'évaluation
- Learning Full Pairwise Affinities For Spectral SegmentationDocument8 pagesLearning Full Pairwise Affinities For Spectral SegmentationUnaixa KhanPas encore d'évaluation
- Recognizing Pictures at An Exhibition Using SIFTDocument5 pagesRecognizing Pictures at An Exhibition Using SIFTAmit Kumar MondalPas encore d'évaluation
- MOTION ESTIMATION AND VIDEO COMPRESSION USING BLOCKSDocument4 pagesMOTION ESTIMATION AND VIDEO COMPRESSION USING BLOCKSJarjit TandelPas encore d'évaluation
- Rethinking Inductive Biases for Surface Normal EstimationDocument14 pagesRethinking Inductive Biases for Surface Normal EstimationClark RenPas encore d'évaluation
- Deep Rectangling For Image Stitching-A Learning BaselineDocument12 pagesDeep Rectangling For Image Stitching-A Learning BaselineklammPas encore d'évaluation
- Medical Image Retrieval Based On Latent Semantic IndexingDocument4 pagesMedical Image Retrieval Based On Latent Semantic IndexingDhiresh DasPas encore d'évaluation
- Zhou 2008Document5 pagesZhou 2008ilyes bensemmanePas encore d'évaluation
- New Additive Watermark Detectors Based On ADocument9 pagesNew Additive Watermark Detectors Based On AJerald RoyPas encore d'évaluation
- Sample NewDocument6 pagesSample Neweasg130Pas encore d'évaluation
- New Algothrithm of Image Segmentation Using Curve Fitting Based Higher Polynimial SmoothingDocument10 pagesNew Algothrithm of Image Segmentation Using Curve Fitting Based Higher Polynimial SmoothingKhoa LêPas encore d'évaluation
- SIFT: Scale Invariant Feature Transform SeminarDocument8 pagesSIFT: Scale Invariant Feature Transform SeminarHemanthkumar TPas encore d'évaluation
- 2016 Retina Vascular TreeDocument5 pages2016 Retina Vascular TreeJothibasu MarappanPas encore d'évaluation
- Match Former WangDocument7 pagesMatch Former WangDouglas HonórioPas encore d'évaluation
- Semantics-Based Image Retrieval by Region SaliencyDocument9 pagesSemantics-Based Image Retrieval by Region SaliencyRazzougui SarahPas encore d'évaluation
- Stanford DogDocument7 pagesStanford DogMincan YangPas encore d'évaluation
- Image Segmentation Based On Watershed and Edge Detection TechniquesDocument7 pagesImage Segmentation Based On Watershed and Edge Detection TechniquesFajar FitrahillahPas encore d'évaluation
- A Deep Learning Based No-Reference Image Quality Assessment Model For Single-Image Super-ResolutionDocument5 pagesA Deep Learning Based No-Reference Image Quality Assessment Model For Single-Image Super-Resolutiongitov13916Pas encore d'évaluation
- Baseband Pulse Transmission: Presented by Asst. Professor ECE DepartmentDocument47 pagesBaseband Pulse Transmission: Presented by Asst. Professor ECE DepartmentImran BashaPas encore d'évaluation
- Lecture2huffmancoding 151018181815 Lva1 App6892Document31 pagesLecture2huffmancoding 151018181815 Lva1 App6892Imran BashaPas encore d'évaluation
- Dual-Band Microwave Sensor For Investigation of Liquid Impurity Concentration Using A Metamaterial Complementary Split-Ring ResonatorDocument10 pagesDual-Band Microwave Sensor For Investigation of Liquid Impurity Concentration Using A Metamaterial Complementary Split-Ring ResonatorImran BashaPas encore d'évaluation
- EDC Fermi LevelDocument10 pagesEDC Fermi LevelImran BashaPas encore d'évaluation
- Wireless Access Tech - VIVDocument94 pagesWireless Access Tech - VIVImran BashaPas encore d'évaluation
- Han 2015Document12 pagesHan 2015Imran BashaPas encore d'évaluation
- 10 1016@j Eswa 2018 03 064Document14 pages10 1016@j Eswa 2018 03 064Imran BashaPas encore d'évaluation
- Crafting Literature ReviewDocument51 pagesCrafting Literature ReviewImran BashaPas encore d'évaluation
- Crafting Literature ReviewDocument51 pagesCrafting Literature ReviewImran BashaPas encore d'évaluation
- Introduction To ScilabDocument55 pagesIntroduction To ScilabImran BashaPas encore d'évaluation
- Naeem2013 PDFDocument6 pagesNaeem2013 PDFImran BashaPas encore d'évaluation
- Seminar Silent Sound TechnologyDocument19 pagesSeminar Silent Sound TechnologyImran BashaPas encore d'évaluation
- Naeem2013 PDFDocument6 pagesNaeem2013 PDFImran BashaPas encore d'évaluation
- QCCE: Quality Constrained Co-Saliency Estimation For Common Object DetectionDocument4 pagesQCCE: Quality Constrained Co-Saliency Estimation For Common Object DetectionImran BashaPas encore d'évaluation
- CMC The BestDocument31 pagesCMC The BestImran BashaPas encore d'évaluation
- M 1 L 2Document14 pagesM 1 L 2Sandeep AngaraPas encore d'évaluation
- Electronic Vs Electrical DevicesDocument1 pageElectronic Vs Electrical DevicesImran BashaPas encore d'évaluation
- Seminar Silent Sound TechnologyDocument19 pagesSeminar Silent Sound TechnologyImran BashaPas encore d'évaluation
- Basic Electronics - by David Williams & Michael ShilohDocument47 pagesBasic Electronics - by David Williams & Michael ShilohNithi Segaran100% (2)
- Image Enhancement in The FDDocument22 pagesImage Enhancement in The FDImran BashaPas encore d'évaluation
- Wimax VivDocument43 pagesWimax VivImran BashaPas encore d'évaluation
- Basic Electronics LECTURE1Document13 pagesBasic Electronics LECTURE1Nishad.K.SaleemPas encore d'évaluation
- Coding Standards pt1 PDFDocument59 pagesCoding Standards pt1 PDFImran BashaPas encore d'évaluation
- Review of ProbabilityDocument74 pagesReview of Probabilitychanphat01001100% (2)
- 12 - Chapter4 (DISTANCE MEASURES) PDFDocument18 pages12 - Chapter4 (DISTANCE MEASURES) PDFImran BashaPas encore d'évaluation
- Chapter 10Document51 pagesChapter 10Imran Basha50% (2)
- Compression Lecture 1ADocument14 pagesCompression Lecture 1AImran BashaPas encore d'évaluation
- 13imagecompression 120321055027 Phpapp02Document54 pages13imagecompression 120321055027 Phpapp02Tripathi VinaPas encore d'évaluation
- Image Compression Coding SchemesDocument96 pagesImage Compression Coding Schemesresmi_ng50% (4)
- MTech Information Security FINAL 10052018Document20 pagesMTech Information Security FINAL 10052018sirisha vPas encore d'évaluation
- Onishi T Ed Quantum Science The Frontier of Physics and ChemDocument498 pagesOnishi T Ed Quantum Science The Frontier of Physics and ChemStrahinja DonicPas encore d'évaluation
- How To Publish A Package in RDocument14 pagesHow To Publish A Package in Rtoton1181Pas encore d'évaluation
- User Mode I. System Support Processes: de Leon - Dolliente - Gayeta - Rondilla It201 - Platform Technology - TPDocument6 pagesUser Mode I. System Support Processes: de Leon - Dolliente - Gayeta - Rondilla It201 - Platform Technology - TPCariza DollientePas encore d'évaluation
- Steps For Charm ConfigurationDocument7 pagesSteps For Charm ConfigurationpoornasapPas encore d'évaluation
- Climate Change: The Fork at The End of NowDocument28 pagesClimate Change: The Fork at The End of NowMomentum Press100% (1)
- PEE3-M Lec 1Document19 pagesPEE3-M Lec 1Ena Leanica DelgadoPas encore d'évaluation
- Example 1 LS Dyna - Bullet Model SimulationDocument6 pagesExample 1 LS Dyna - Bullet Model Simulationsunil_vrvPas encore d'évaluation
- 000 200 1210 Guidelines For Minimum Deliverables 3 November 2011Document22 pages000 200 1210 Guidelines For Minimum Deliverables 3 November 2011Raul Bautista100% (1)
- Notes Measures of Variation Range and Interquartile RangeDocument11 pagesNotes Measures of Variation Range and Interquartile RangedburrisPas encore d'évaluation
- Sample Question Paper Provides Practice for Class 9 Science ExamDocument5 pagesSample Question Paper Provides Practice for Class 9 Science ExamViswak BalajiPas encore d'évaluation
- Pneumatic Tyres: CMR Engineering CollegeDocument17 pagesPneumatic Tyres: CMR Engineering CollegeHemanth Rama Krishna YernagulaPas encore d'évaluation
- Unit 3: Databases & SQL: Developed By: Ms. Nita Arora Kulachi Hansraj Model School Ashok ViharDocument18 pagesUnit 3: Databases & SQL: Developed By: Ms. Nita Arora Kulachi Hansraj Model School Ashok ViharAthira SomanPas encore d'évaluation
- THKDocument1 901 pagesTHKapi-26356646Pas encore d'évaluation
- GenEd Mathematics LLL PDFDocument32 pagesGenEd Mathematics LLL PDFArmely NiedoPas encore d'évaluation
- Training Matrix For TM IDocument14 pagesTraining Matrix For TM IApril NavarettePas encore d'évaluation
- Potenciometro 15KDocument8 pagesPotenciometro 15Kra101208Pas encore d'évaluation
- Lab Manual MCSE 101Document35 pagesLab Manual MCSE 101Juan JacksonPas encore d'évaluation
- DSD - Assignment 1 2018Document3 pagesDSD - Assignment 1 2018Naveen KumarPas encore d'évaluation
- Ms-Dos Device Drivers: Device Drivers Are The That in File atDocument13 pagesMs-Dos Device Drivers: Device Drivers Are The That in File atJass GillPas encore d'évaluation
- Turbine Buyers Guide - Mick Sagrillo & Ian WoofendenDocument7 pagesTurbine Buyers Guide - Mick Sagrillo & Ian WoofendenAnonymous xYhjeilnZPas encore d'évaluation
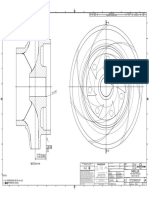
- Impeller: REV Rev by Description PCN / Ecn Date CHK'D A JMM Released For Production N/A 18/11/2019 PDLDocument1 pageImpeller: REV Rev by Description PCN / Ecn Date CHK'D A JMM Released For Production N/A 18/11/2019 PDLSenthilkumar RamalingamPas encore d'évaluation
- Delta VFD E Series User ManualDocument399 pagesDelta VFD E Series User ManualTendai AlfacePas encore d'évaluation
- PVC PLasticisersDocument2 pagesPVC PLasticisersKrishna PrasadPas encore d'évaluation
- Ex - No: 4 Integrator and Differentiator Using Fpaa DateDocument4 pagesEx - No: 4 Integrator and Differentiator Using Fpaa DatechandraprabhaPas encore d'évaluation
- Rochor Station Pile Design CalculationsDocument15 pagesRochor Station Pile Design CalculationsDifa LiuPas encore d'évaluation
- 12 Animation Q1 AnswerDocument38 pages12 Animation Q1 AnswerBilly Joe TanPas encore d'évaluation
- Hydrogen and Its Compound.1Document10 pagesHydrogen and Its Compound.1abhishekPas encore d'évaluation
- Gabion Retaining Wall Design GuideDocument30 pagesGabion Retaining Wall Design GuideThomas Hill80% (5)
- Gallium Nitride Materials and Devices IV: Proceedings of SpieDocument16 pagesGallium Nitride Materials and Devices IV: Proceedings of SpieBatiriMichaelPas encore d'évaluation
- Autodesk Fusion 360: A Power Guide for Beginners and Intermediate Users (3rd Edition)D'EverandAutodesk Fusion 360: A Power Guide for Beginners and Intermediate Users (3rd Edition)Évaluation : 5 sur 5 étoiles5/5 (2)
- Mastering Autodesk Inventor 2014 and Autodesk Inventor LT 2014: Autodesk Official PressD'EverandMastering Autodesk Inventor 2014 and Autodesk Inventor LT 2014: Autodesk Official PressÉvaluation : 5 sur 5 étoiles5/5 (1)
- The Geometrical Tolerancing Desk Reference: Creating and Interpreting ISO Standard Technical DrawingsD'EverandThe Geometrical Tolerancing Desk Reference: Creating and Interpreting ISO Standard Technical DrawingsÉvaluation : 4.5 sur 5 étoiles4.5/5 (10)
- SolidWorks 2015 Learn by doing-Part 2 (Surface Design, Mold Tools, and Weldments)D'EverandSolidWorks 2015 Learn by doing-Part 2 (Surface Design, Mold Tools, and Weldments)Évaluation : 4.5 sur 5 étoiles4.5/5 (5)
- Fusion 360 | Step by Step: CAD Design, FEM Simulation & CAM for Beginners.D'EverandFusion 360 | Step by Step: CAD Design, FEM Simulation & CAM for Beginners.Pas encore d'évaluation
- Beginning AutoCAD® 2020 Exercise WorkbookD'EverandBeginning AutoCAD® 2020 Exercise WorkbookÉvaluation : 2.5 sur 5 étoiles2.5/5 (3)
- Autodesk Inventor 2020: A Power Guide for Beginners and Intermediate UsersD'EverandAutodesk Inventor 2020: A Power Guide for Beginners and Intermediate UsersPas encore d'évaluation
- Beginning AutoCAD® 2022 Exercise Workbook: For Windows®D'EverandBeginning AutoCAD® 2022 Exercise Workbook: For Windows®Pas encore d'évaluation