Vous aimerez peut-être aussi
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (890)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (587)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (119)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2219)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- Azure Single Vnet Dedicated Inbound Deployment Guide PDFDocument201 pagesAzure Single Vnet Dedicated Inbound Deployment Guide PDFGary TownsendPas encore d'évaluation
- Difference between supercomputers and mainframe computersDocument5 pagesDifference between supercomputers and mainframe computersHafeez NiaziPas encore d'évaluation
- Distributed Technologies-Cycle Test 1 QuestionsDocument1 pageDistributed Technologies-Cycle Test 1 Questionssulthan_81Pas encore d'évaluation
- Configuration Verbunden Effort Conception With Autoevalution of Intellectual Running ON Data Processor of The Sun TrackerDocument23 pagesConfiguration Verbunden Effort Conception With Autoevalution of Intellectual Running ON Data Processor of The Sun Trackersulthan_81Pas encore d'évaluation
- Microsoft Word: Instructors: Connie Hutchison & Christopher MccoyDocument29 pagesMicrosoft Word: Instructors: Connie Hutchison & Christopher MccoystefanyPas encore d'évaluation
- Distributed Technologies-Cycle Test 1 QuestionsDocument1 pageDistributed Technologies-Cycle Test 1 Questionssulthan_81Pas encore d'évaluation
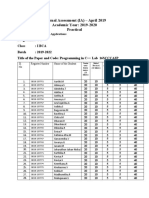
- Internal Assessment (IA) - April 2019 Academic Year: 2019-2020 PracticalDocument2 pagesInternal Assessment (IA) - April 2019 Academic Year: 2019-2020 Practicalsulthan_81Pas encore d'évaluation
- P16MCAE10Document2 pagesP16MCAE10sulthan_81Pas encore d'évaluation
- ABSTRACTDocument4 pagesABSTRACTsulthan_81Pas encore d'évaluation
- Servlet - Returning Information Received From The ClientDocument7 pagesServlet - Returning Information Received From The Clientsulthan_81Pas encore d'évaluation
- Servlet - Returning Information Received From The ClientDocument7 pagesServlet - Returning Information Received From The Clientsulthan_81Pas encore d'évaluation
- Gridview ExerciseDocument6 pagesGridview Exercisesulthan_81Pas encore d'évaluation
- Operating Systems For BcaDocument5 pagesOperating Systems For Bcasulthan_81Pas encore d'évaluation
- Server-Side Programming: Java ServletsDocument116 pagesServer-Side Programming: Java ServletsANMOL CHAUHANPas encore d'évaluation
- ABSTRACTDocument4 pagesABSTRACTsulthan_81Pas encore d'évaluation
- Operating Systems For BcaDocument5 pagesOperating Systems For Bcasulthan_81Pas encore d'évaluation
- Gridview ExerciseDocument6 pagesGridview Exercisesulthan_81Pas encore d'évaluation
- HTML TutorialDocument41 pagesHTML Tutorialsulthan_81Pas encore d'évaluation
- HTML TutorialDocument39 pagesHTML Tutorialsulthan_81Pas encore d'évaluation
- HTML TutorialDocument39 pagesHTML Tutorialsulthan_81Pas encore d'évaluation
- Server-Side Programming: Java ServletsDocument116 pagesServer-Side Programming: Java ServletsANMOL CHAUHANPas encore d'évaluation
- HTML NotesDocument56 pagesHTML NotesDhanasri0% (1)
- Assessing the Impact of User Convergence Generalization on Telecom RecruitmentDocument21 pagesAssessing the Impact of User Convergence Generalization on Telecom Recruitmentsulthan_81Pas encore d'évaluation
- HTML NotesDocument56 pagesHTML NotesDhanasri0% (1)
- An Adaptive Framework For Recommended Based Learning Management SystemDocument23 pagesAn Adaptive Framework For Recommended Based Learning Management Systemsulthan_81Pas encore d'évaluation
- R.Punitha Research ScholarDocument18 pagesR.Punitha Research Scholarsulthan_81Pas encore d'évaluation
- 4.gaussain MixtureDocument6 pages4.gaussain Mixturesulthan_81Pas encore d'évaluation
- 4.instance Based LearningDocument6 pages4.instance Based Learningsulthan_81Pas encore d'évaluation
- 4.gaussain MixtureDocument6 pages4.gaussain Mixturesulthan_81Pas encore d'évaluation
- ETSI M2M (Mamppt)Document33 pagesETSI M2M (Mamppt)sulthan_81Pas encore d'évaluation
- Ts 102690v010201pDocument279 pagesTs 102690v010201psulthan_81Pas encore d'évaluation
- Transportation and Assignment Problems Solved with Linear Programming TechniquesDocument37 pagesTransportation and Assignment Problems Solved with Linear Programming TechniquesGhadeer ShPas encore d'évaluation
- Catalogue Master's in Global BIM ManagementDocument20 pagesCatalogue Master's in Global BIM ManagementGabriela P. Martinez100% (1)
- Itu-G 168Document134 pagesItu-G 168Ilya FinkelPas encore d'évaluation
- E-GP System User Manual - Authorized Officer UserDocument85 pagesE-GP System User Manual - Authorized Officer Usermy09Pas encore d'évaluation
- Chapter 3 LDPC Encoders 3.1 Introduction The Encoder of LDPCDocument4 pagesChapter 3 LDPC Encoders 3.1 Introduction The Encoder of LDPCஆனந்த் குமார்Pas encore d'évaluation
- AlertsDocument21 pagesAlertsSuriya ParithyPas encore d'évaluation
- Raj Kumar GuptaDocument2 pagesRaj Kumar GuptaRaj K Gupta100% (2)
- Standard Yarn Weight SystemDocument2 pagesStandard Yarn Weight SystemsignemrPas encore d'évaluation
- Norma Iso 21500Document42 pagesNorma Iso 21500Jesus Antonio Rivera Pinzon100% (1)
- SAP Community TagsDocument189 pagesSAP Community TagsmsandeeprajaPas encore d'évaluation
- Puzzle CIG12Document7 pagesPuzzle CIG12Phillip WheatleyPas encore d'évaluation
- Umitt Examination Schedule - 1Document152 pagesUmitt Examination Schedule - 1HerryPas encore d'évaluation
- TSP158 Ardac Elite EP Host Manual V2.0Document37 pagesTSP158 Ardac Elite EP Host Manual V2.0cademorePas encore d'évaluation
- Unit-Iv Hopfield Networks: As Per Jntu Your Syllabus IsDocument48 pagesUnit-Iv Hopfield Networks: As Per Jntu Your Syllabus IsJustin CookPas encore d'évaluation
- Intel (R) AMT SDK Implementation and Reference GuideDocument11 pagesIntel (R) AMT SDK Implementation and Reference GuideKyle DalyPas encore d'évaluation
- Full Catalogue 2006 10Document53 pagesFull Catalogue 2006 10Harchet BrarPas encore d'évaluation
- EMC Backup System Sizer Release Notes - 2Document10 pagesEMC Backup System Sizer Release Notes - 2makuaaPas encore d'évaluation
- Classical Line GraphsDocument4 pagesClassical Line GraphsDAS KamraPas encore d'évaluation
- PM EquipmentDocument16 pagesPM Equipmentsiva prasadPas encore d'évaluation
- Old User Guide PDFDocument42 pagesOld User Guide PDFmughees_itcompPas encore d'évaluation
- Micro C Tutorial For LCD AND KEYPAD INTEDocument24 pagesMicro C Tutorial For LCD AND KEYPAD INTEcarlosgnPas encore d'évaluation
- How Is Charge Account Populated For One-Time Item On Core Purchasing Application ID 415572.1Document2 pagesHow Is Charge Account Populated For One-Time Item On Core Purchasing Application ID 415572.1javierPas encore d'évaluation
- IntelDocument5 pagesIntelrAM50% (2)
- Data Structure Lab AssignmentDocument38 pagesData Structure Lab AssignmentAbhratanu PalPas encore d'évaluation
- 04c Process Map Templates-V2.0 PDFDocument17 pages04c Process Map Templates-V2.0 PDFAlfredo FloresPas encore d'évaluation
- Solaris Zones CloneDocument15 pagesSolaris Zones Clonesanju_81Pas encore d'évaluation
- Application Model of K-Means Clustering: Insights Into Promotion Strategy of Vocational High SchoolDocument6 pagesApplication Model of K-Means Clustering: Insights Into Promotion Strategy of Vocational High SchoolYuda Ba RyPas encore d'évaluation
- M.E (Or) QBDocument21 pagesM.E (Or) QBkeerthi_sm180% (1)