Vous aimerez peut-être aussi
- Informe Robot Abb 1100Document25 pagesInforme Robot Abb 1100WALTER MAX MONTAÑO CAMACHO100% (1)
- Trabajo1 Simulink PDFDocument11 pagesTrabajo1 Simulink PDFEnrique Monzón50% (2)
- Sistema Péndulo CarretillaDocument17 pagesSistema Péndulo CarretillaJosé MartínezPas encore d'évaluation
- Guía de Laboratorio 6 - MecanismosDocument7 pagesGuía de Laboratorio 6 - MecanismosAdrian MejiasPas encore d'évaluation
- Mecanismos: Biela-Manivela-CorrederaDocument3 pagesMecanismos: Biela-Manivela-CorrederaOdinAguilarPas encore d'évaluation
- Mecanismo de Cuatro Barras Manivela InvertidaDocument19 pagesMecanismo de Cuatro Barras Manivela InvertidaPatricia OlguinPas encore d'évaluation
- Demostración Ecuación Bernoulli Cristóbal Mora ConchaDocument7 pagesDemostración Ecuación Bernoulli Cristóbal Mora ConchaBastian AlesPas encore d'évaluation
- Tutoria15722961 PDFDocument19 pagesTutoria15722961 PDFCarla Garcia EsquivaPas encore d'évaluation
- Asignación Simulink - Ismael PalmaDocument23 pagesAsignación Simulink - Ismael PalmaVictorPas encore d'évaluation
- Practica4 MCDocument10 pagesPractica4 MCAzucena LopezPas encore d'évaluation
- CAPÍTULO 3 Cinemática de FluidosDocument36 pagesCAPÍTULO 3 Cinemática de FluidosCarmenROsaFlOresEstradaPas encore d'évaluation
- Modelamiento Matemático de Sistemas MecánicosDocument10 pagesModelamiento Matemático de Sistemas Mecánicosmjjulcam2Pas encore d'évaluation
- Maquina de Adwood Con Polea (Cronolab)Document5 pagesMaquina de Adwood Con Polea (Cronolab)Sebastián GaviriaPas encore d'évaluation
- Mecanismos - Becerra.Berrones - IA.Investigacion U2Document12 pagesMecanismos - Becerra.Berrones - IA.Investigacion U2Asiel BecerraPas encore d'évaluation
- Informe de MecanismosDocument11 pagesInforme de Mecanismosfernando castro padillaPas encore d'évaluation
- Integral de DuhamelDocument14 pagesIntegral de DuhamelAlex Guerrero CelmiPas encore d'évaluation
- Guía de Laboratorio 05 - Teoria de MecanismosDocument7 pagesGuía de Laboratorio 05 - Teoria de MecanismosAndrés GarcíaPas encore d'évaluation
- Rodriguez PC02Document7 pagesRodriguez PC02Gianfranco RodriguezPas encore d'évaluation
- 2.-Análisis de Mecanismos ArticuladosDocument12 pages2.-Análisis de Mecanismos ArticuladosTersy Comi GonzalezPas encore d'évaluation
- Modelo Dinámico de Sistemas Mediante La Ecuación de Lagrange - FinalDocument27 pagesModelo Dinámico de Sistemas Mediante La Ecuación de Lagrange - FinalTyronPas encore d'évaluation
- Informe2 Robo2 PDFDocument40 pagesInforme2 Robo2 PDFmaicoPas encore d'évaluation
- Modelado de MotorDocument11 pagesModelado de MotorJose AguilarPas encore d'évaluation
- Avance 2Document5 pagesAvance 2jefatura.docentes.jfPas encore d'évaluation
- Taller Auto ImprimirDocument11 pagesTaller Auto ImprimirJandres MaldonadoPas encore d'évaluation
- Informe 3 Principio de BernoulliDocument15 pagesInforme 3 Principio de BernoulliWilliamPas encore d'évaluation
- Laboratorio - 7Document3 pagesLaboratorio - 7Fernando BatistaPas encore d'évaluation
- LaplaceDocument15 pagesLaplaceJesús Hurtado IzquierdoPas encore d'évaluation
- Laboratorio DirigidoDocument9 pagesLaboratorio DirigidoEstebanPas encore d'évaluation
- Simulink 2Document6 pagesSimulink 2Jose ContrerasPas encore d'évaluation
- Teoría de Máquinas y Mecanismos-Tarea 4Document1 pageTeoría de Máquinas y Mecanismos-Tarea 4vanessa marquezPas encore d'évaluation
- Unidad 2 - Etapa 3 - Grupo 63Document37 pagesUnidad 2 - Etapa 3 - Grupo 63Jairo HurtatisPas encore d'évaluation
- Análisis de Estabilidad Longitudinal Vdba 7av3Document9 pagesAnálisis de Estabilidad Longitudinal Vdba 7av3Brenda Abigail Villa DíazPas encore d'évaluation
- Informe 3232Document11 pagesInforme 3232williams floresPas encore d'évaluation
- Maquina de Adwood (Cronolab)Document4 pagesMaquina de Adwood (Cronolab)Andres CampoPas encore d'évaluation
- P5 CP CautomaticoDocument5 pagesP5 CP CautomaticoSebastian CachiguangoPas encore d'évaluation
- Capítulo 3: Hidrocinematica - Cinemática de FluidosDocument37 pagesCapítulo 3: Hidrocinematica - Cinemática de FluidosGeyberson Duaner Davila AlvarezPas encore d'évaluation
- Informe Dinámica Grupo 2Document9 pagesInforme Dinámica Grupo 2Alex QuilichePas encore d'évaluation
- Parcial 3 DinamicosDocument12 pagesParcial 3 DinamicosJorge Eduardo Orozco ZunigaPas encore d'évaluation
- Practica 2Document23 pagesPractica 2Carlos Cordoba MoralesPas encore d'évaluation
- Modelado Matematico de Tanque de AlmacenamientoDocument11 pagesModelado Matematico de Tanque de Almacenamientoivan martinezPas encore d'évaluation
- Leyes de NewtonDocument14 pagesLeyes de Newton20221278Pas encore d'évaluation
- Proyecto Final Integrador. - Anthony Cuenca - Keny GuayacondoDocument19 pagesProyecto Final Integrador. - Anthony Cuenca - Keny GuayacondoAnthony DaríoPas encore d'évaluation
- Informe de Cinematica DeltaDocument17 pagesInforme de Cinematica DeltaKendrick TeodorPas encore d'évaluation
- Simulación 14Document4 pagesSimulación 14Aarón García HernándezPas encore d'évaluation
- Analisis AscensorDocument6 pagesAnalisis AscensorJavierPas encore d'évaluation
- ESCALAMIENTO DE RESULTADOS y ANALISIS DIMENSIONALDocument28 pagesESCALAMIENTO DE RESULTADOS y ANALISIS DIMENSIONALjoan davidPas encore d'évaluation
- TRABAJO Fen Meno de Vorticidad en Un TuboDocument10 pagesTRABAJO Fen Meno de Vorticidad en Un TuboNicolay Abanto HuertaPas encore d'évaluation
- Unidad IIDocument39 pagesUnidad IIalantruco123nzPas encore d'évaluation
- Pre-Saberes Edwin Lievano G22Document8 pagesPre-Saberes Edwin Lievano G22Edwin Fabian LievanoPas encore d'évaluation
- Web AssignDocument11 pagesWeb AssignRichardMoraPas encore d'évaluation
- Trabajo MecanismoDocument7 pagesTrabajo MecanismoBrayan AriasPas encore d'évaluation
- Vigas ContinuasDocument71 pagesVigas ContinuasLenin Farfan AlvarezPas encore d'évaluation
- Pre-Tarea - Juan David CeballosDocument18 pagesPre-Tarea - Juan David CeballosChristian David Garcia Meneses100% (1)
- Boletín 6 Soluciones v6Document21 pagesBoletín 6 Soluciones v6fragullaPas encore d'évaluation
- Análisis de Pequeña Señal Sensitividad Factor de ParticipacionDocument5 pagesAnálisis de Pequeña Señal Sensitividad Factor de ParticipacionDani Tapia100% (1)
- Etapa 2 - Richard Corredor - 243005Document7 pagesEtapa 2 - Richard Corredor - 243005Sneider Alvarez0% (1)
- Riesgos y Desastres.Document11 pagesRiesgos y Desastres.Jesús RuizPas encore d'évaluation
- Y Planos. Regiones Corporales. Cavidades CorporalesDocument12 pagesY Planos. Regiones Corporales. Cavidades Corporalesriesgos33Pas encore d'évaluation
- Cdi - U2 - A2 - XxyzDocument7 pagesCdi - U2 - A2 - XxyzKragorGulPas encore d'évaluation
- Hoja de Vida Rafael Dionisio Vélez Ramos 2013-04-13Document4 pagesHoja de Vida Rafael Dionisio Vélez Ramos 2013-04-13Carlos Oliver van ArcherPas encore d'évaluation
- 3° - Ruta Jueves 2 de Setiembre 2021 - Ciencia y TecnologíaDocument7 pages3° - Ruta Jueves 2 de Setiembre 2021 - Ciencia y Tecnologíarosa tavara natividadPas encore d'évaluation
- Farabeuf: Escritura Barroca y Novela Mexicana: Margo GlantzDocument10 pagesFarabeuf: Escritura Barroca y Novela Mexicana: Margo GlantzGamaliel Pineda CervantesPas encore d'évaluation
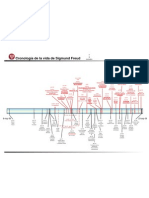
- Cronología FreudDocument1 pageCronología FreudhotmailrPas encore d'évaluation
- Definiciones de Dios en Varios PensadoresDocument12 pagesDefiniciones de Dios en Varios PensadoresFredy PintorPas encore d'évaluation
- Concesiones Mineras PDFDocument13 pagesConcesiones Mineras PDFtiare100% (1)
- L14 Carmen El Camello JDocument8 pagesL14 Carmen El Camello Jmarcelo sanhuezaPas encore d'évaluation
- Ensayo JepDocument4 pagesEnsayo JepAmadeus MüllerPas encore d'évaluation
- Guia 02 Metodos Matematicos: Broncano Torres Juan CarlosDocument5 pagesGuia 02 Metodos Matematicos: Broncano Torres Juan CarlosJuan Carlos BroncanotorresPas encore d'évaluation
- Analisis de Partículas Suspendidas TotalesDocument8 pagesAnalisis de Partículas Suspendidas TotalesChuco Oscanoa Alexis JoelPas encore d'évaluation
- Rachel Van Dyken - Saga Eagle Elite - 02 - ElectDocument263 pagesRachel Van Dyken - Saga Eagle Elite - 02 - ElectRocio Garcia100% (2)
- Caso Éico 2Document4 pagesCaso Éico 2Leonardo HernándezPas encore d'évaluation
- Apuntes de Aprendizaje M2Document9 pagesApuntes de Aprendizaje M2Bastian Alexander Rodríguez MarifilPas encore d'évaluation
- Tesis Analisis de La Voz Narrativa Gerard GenetteDocument10 pagesTesis Analisis de La Voz Narrativa Gerard Genettevhriverosr2013Pas encore d'évaluation
- De Montevideo A Moscu Febrero de 1945 Emilio FrugoniDocument114 pagesDe Montevideo A Moscu Febrero de 1945 Emilio FrugoniCristianPas encore d'évaluation
- Discov Geometry GlossaryinspanishDocument28 pagesDiscov Geometry GlossaryinspanishjordybeltPas encore d'évaluation
- Derecho Civil 3 Silabo 5Document5 pagesDerecho Civil 3 Silabo 5Benjamín GuzmánPas encore d'évaluation
- Lectura 6. Contrato de Agencia - Zavala RodriguezDocument8 pagesLectura 6. Contrato de Agencia - Zavala RodriguezPau MarPas encore d'évaluation
- Tarea 4 de EstadisticaDocument5 pagesTarea 4 de EstadisticaJuana María Acosta AbreuPas encore d'évaluation
- Practica 8Document2 pagesPractica 8Hoyos AstridPas encore d'évaluation
- Fusion y Refinado de MetalesDocument27 pagesFusion y Refinado de MetalesWilfredoPas encore d'évaluation
- Las Cuatro Etapas Del Desarrollo CognitivoDocument11 pagesLas Cuatro Etapas Del Desarrollo CognitivoCriss GualpaPas encore d'évaluation
- Instrumentos de Evaluación en R. Psico-SocDocument23 pagesInstrumentos de Evaluación en R. Psico-SocDavid CamachoPas encore d'évaluation
- Solucionario de Calculo 3 de MitaccDocument93 pagesSolucionario de Calculo 3 de MitaccMoises Apz Qmc50% (2)
- Guia Evaluada Civilizaciones y El Mediterraneo DiferenciadaDocument3 pagesGuia Evaluada Civilizaciones y El Mediterraneo DiferenciadaDaniela Andrea Cataldo GaetePas encore d'évaluation
- 2° Parcial-Preguntero ECONOMIA 2 - Junio-2021 - 210721 - 011932Document15 pages2° Parcial-Preguntero ECONOMIA 2 - Junio-2021 - 210721 - 011932ElisaPas encore d'évaluation
- Respuestas de La Actividad Practica Cap 2 Cisco Ccna 3Document5 pagesRespuestas de La Actividad Practica Cap 2 Cisco Ccna 3Barbara Sanchez0% (1)