Vous aimerez peut-être aussi
- Small Dynamos and How to Make Them - Practical Instruction on Building a Variety of Machines Including Electric MotorsD'EverandSmall Dynamos and How to Make Them - Practical Instruction on Building a Variety of Machines Including Electric MotorsPas encore d'évaluation
- Classless Addressing - CIDR in NetworkingDocument12 pagesClassless Addressing - CIDR in Networkingrazarafiq033Pas encore d'évaluation
- Permanent Magnet Synchronous Motors (PMSM)Document34 pagesPermanent Magnet Synchronous Motors (PMSM)Navdeep KaurPas encore d'évaluation
- 2019 Subject Guide PDFDocument190 pages2019 Subject Guide PDFrazarafiq033Pas encore d'évaluation
- Power Systems Modelling and Fault Analysis: Theory and PracticeD'EverandPower Systems Modelling and Fault Analysis: Theory and PracticeÉvaluation : 2 sur 5 étoiles2/5 (1)
- Modeling of PMSMDocument28 pagesModeling of PMSMMd QutubuddinPas encore d'évaluation
- Study of a reluctance magnetic gearbox for energy storage system applicationD'EverandStudy of a reluctance magnetic gearbox for energy storage system applicationÉvaluation : 1 sur 5 étoiles1/5 (1)
- Permanent Magnet Synchronous MachineDocument7 pagesPermanent Magnet Synchronous MachineSantiago DavidPas encore d'évaluation
- Permanant Magnet Synchronous MotorDocument47 pagesPermanant Magnet Synchronous Motorsubaganesh232Pas encore d'évaluation
- Ray DiagramDocument2 pagesRay Diagramnmrasa100% (2)
- Ice Cube 2021 Paper 39Document5 pagesIce Cube 2021 Paper 39fazianPas encore d'évaluation
- Paper 4 PDFDocument5 pagesPaper 4 PDFAsif HussainPas encore d'évaluation
- Design and Analysis of A Novel Brushless Wound Rotor Synchronous MachineDocument4 pagesDesign and Analysis of A Novel Brushless Wound Rotor Synchronous MachineHuong ThaoPas encore d'évaluation
- Analysis of Reactive Power Compensation Effect of A New Hybrid Excitation Brushless DC GeneratorDocument11 pagesAnalysis of Reactive Power Compensation Effect of A New Hybrid Excitation Brushless DC Generatorlinnan sunPas encore d'évaluation
- Dual-Mode Wound Rotor Synchronous Machine For Variable Speed ApplicationsDocument11 pagesDual-Mode Wound Rotor Synchronous Machine For Variable Speed ApplicationsAsif HussainPas encore d'évaluation
- Module 4 - 2&16marksDocument22 pagesModule 4 - 2&16markskesavantPas encore d'évaluation
- Application Characteristics of Permanent Magnet Synchronous Motors (Case Study)Document6 pagesApplication Characteristics of Permanent Magnet Synchronous Motors (Case Study)RakeshconclavePas encore d'évaluation
- DQ InductanceDocument11 pagesDQ Inductancegthulasi789193Pas encore d'évaluation
- e-Publications@Marquette e-Publications@MarquetteDocument29 pagese-Publications@Marquette e-Publications@MarquetteAmeerkhanPas encore d'évaluation
- Synchronous Drive PerformanceDocument8 pagesSynchronous Drive PerformancehaimantiPas encore d'évaluation
- Dynamic Modeling of Wind Turbine Based Axial Flux Permanent Magnetic Synchronous Generator Connected To The Grid With Switch Reduced ConverterDocument11 pagesDynamic Modeling of Wind Turbine Based Axial Flux Permanent Magnetic Synchronous Generator Connected To The Grid With Switch Reduced Convertershahin mirzaeiPas encore d'évaluation
- Methods For Cogging Torque Reduction of Directly Driven PM Wind GeneratorsDocument6 pagesMethods For Cogging Torque Reduction of Directly Driven PM Wind GeneratorsBodoShowPas encore d'évaluation
- Modeling and Simulation of Six-Phase Permanent Magnet Synchronous Motor DriveDocument9 pagesModeling and Simulation of Six-Phase Permanent Magnet Synchronous Motor Driveجمال ضيفي100% (1)
- Analytical Investigation On Fundamental Electrical Characteristics of Large Air-Gap Superconducting Synchronous MachineDocument8 pagesAnalytical Investigation On Fundamental Electrical Characteristics of Large Air-Gap Superconducting Synchronous MachineahmadPas encore d'évaluation
- Brushless Operation of A Wound-Field Synchronous Machine Using A Novel Winding SchemeDocument4 pagesBrushless Operation of A Wound-Field Synchronous Machine Using A Novel Winding SchemeAsif HussainPas encore d'évaluation
- Brushless Operation of A Wound-Field Synchronous Machine Using A Novel Winding SchemeDocument4 pagesBrushless Operation of A Wound-Field Synchronous Machine Using A Novel Winding SchemeAsif HussainPas encore d'évaluation
- Comparison Between Field Oriented Contro PDFDocument6 pagesComparison Between Field Oriented Contro PDFVincRocPas encore d'évaluation
- Development of A Prime Mover Emulator Using A Permanent-Magnet Synchronous Motor DriveDocument12 pagesDevelopment of A Prime Mover Emulator Using A Permanent-Magnet Synchronous Motor DrivePablo LopezPas encore d'évaluation
- Modelling and Controlof A Wind Turbine Using PermaDocument8 pagesModelling and Controlof A Wind Turbine Using PermaALEJANDRO JOSE VARGAS OPORTOPas encore d'évaluation
- 1 - Review of Position-Sensorless Operation of Brushless Permanent-Magnet MachinesDocument11 pages1 - Review of Position-Sensorless Operation of Brushless Permanent-Magnet MachinesPhạm Văn TưởngPas encore d'évaluation
- 04 Wheel Axial Flux SRM Drive Light Electric VehiclesDocument8 pages04 Wheel Axial Flux SRM Drive Light Electric VehiclesSek PyroPas encore d'évaluation
- 492 FerreiraDocument6 pages492 FerreiraRonald LiemPas encore d'évaluation
- Modeling Simulation and Analysis of Permanent-Magnet Motor Drives. I. The Permanent-Magnet Synchronous Motor DriveDocument9 pagesModeling Simulation and Analysis of Permanent-Magnet Motor Drives. I. The Permanent-Magnet Synchronous Motor DriveArthur CaiPas encore d'évaluation
- Calculation of Total Current Harmonic Distortion by PWM Method For Permanent Magnet Synchronous MotorsDocument4 pagesCalculation of Total Current Harmonic Distortion by PWM Method For Permanent Magnet Synchronous MotorsShakeel RanaPas encore d'évaluation
- Analysis - Simulation and Practical Evaluation of Torque Vector Control Strategies For Medium Power Highly Responsive PMSM DrivesDocument8 pagesAnalysis - Simulation and Practical Evaluation of Torque Vector Control Strategies For Medium Power Highly Responsive PMSM Drives22dr0302Pas encore d'évaluation
- International Journal of Engineering Research and Development (IJERD)Document7 pagesInternational Journal of Engineering Research and Development (IJERD)IJERDPas encore d'évaluation
- Magnetic Equivalent Circuit Models Using Global Reluctance Networks Methodology For Design of Permanent Magnet Flux Switching MachineDocument8 pagesMagnetic Equivalent Circuit Models Using Global Reluctance Networks Methodology For Design of Permanent Magnet Flux Switching Machineihab benayachePas encore d'évaluation
- Progress in Electromagnetics Research, Vol. 131, 81-97, 2012Document17 pagesProgress in Electromagnetics Research, Vol. 131, 81-97, 2012hakmanPas encore d'évaluation
- Electromagnetic Torque Capabilities of Axial-Flux and Radial-Flux Permanent-Magnet MachinesDocument4 pagesElectromagnetic Torque Capabilities of Axial-Flux and Radial-Flux Permanent-Magnet MachinessosiPas encore d'évaluation
- Journal Jpe 17-5 1858636731Document8 pagesJournal Jpe 17-5 1858636731mashood nasirPas encore d'évaluation
- Dps Module3 NoteDocument8 pagesDps Module3 NoteDivya BabuPas encore d'évaluation
- 09-Brushless Operation of Wound-Rotor Synchronous Machine Based On Sub-Harmonic Excitation Technique Using Multi-Pole Stator WindingsDocument16 pages09-Brushless Operation of Wound-Rotor Synchronous Machine Based On Sub-Harmonic Excitation Technique Using Multi-Pole Stator WindingsMuhammad HumzaPas encore d'évaluation
- COMPARATIVE ANALYSIS OF PMSM and BLDC MOTORS FOR EV AND HEV APPLICATIONSDocument5 pagesCOMPARATIVE ANALYSIS OF PMSM and BLDC MOTORS FOR EV AND HEV APPLICATIONSsachin kumarPas encore d'évaluation
- Energies 08 10335Document19 pagesEnergies 08 10335Ahmet GündoğduPas encore d'évaluation
- Novel Flux Linkage Estimation Algorithm For A Variable Flux PMSMDocument17 pagesNovel Flux Linkage Estimation Algorithm For A Variable Flux PMSMViệt Anh PhạmPas encore d'évaluation
- Variable-Flux Outer-Rotor Permanent Magnet Synchronous Motor For In-Wheel Direct-Drive ApplicationsDocument8 pagesVariable-Flux Outer-Rotor Permanent Magnet Synchronous Motor For In-Wheel Direct-Drive Applicationsdeepakmahto.eePas encore d'évaluation
- Elementary Analysis of Segmental StatorDocument7 pagesElementary Analysis of Segmental StatordafPas encore d'évaluation
- Direct Torque Control (DTC) of PMSM Using Space Vector Modulated Inverter: A Simulink ApproachDocument4 pagesDirect Torque Control (DTC) of PMSM Using Space Vector Modulated Inverter: A Simulink ApproachKushagra KhamesraPas encore d'évaluation
- Sharma 2020Document6 pagesSharma 2020Rana AtharPas encore d'évaluation
- 7.1.1 FE Formulation of The Field ProblemDocument6 pages7.1.1 FE Formulation of The Field Problemgurunathan14Pas encore d'évaluation
- Mathematics 10 03364Document16 pagesMathematics 10 03364Ahmad AbugoushPas encore d'évaluation
- Axial-Flux Permanent-Magnet Synchronous Generator WithDocument9 pagesAxial-Flux Permanent-Magnet Synchronous Generator WithSeksan KhamkaewPas encore d'évaluation
- Design and Testing of Flux Switched Permanent Magnet (FSPM) MachinesDocument27 pagesDesign and Testing of Flux Switched Permanent Magnet (FSPM) MachinesjalilemadiPas encore d'évaluation
- Chalmers 1980Document9 pagesChalmers 1980Iraqi stormPas encore d'évaluation
- Stator Flux Oriented ControlDocument9 pagesStator Flux Oriented ControlNelly Catherine Barbosa CalderónPas encore d'évaluation
- Lipo PDFDocument11 pagesLipo PDFjalilemadiPas encore d'évaluation
- Unbalanced Magnetic ForcesDocument10 pagesUnbalanced Magnetic Forcesrakeshee2007Pas encore d'évaluation
- Permanent Magnet Synchronous Generator (PMSG) - Construction: Unit 2.5-PMSG Based On Wind Energy Conversion SystemDocument3 pagesPermanent Magnet Synchronous Generator (PMSG) - Construction: Unit 2.5-PMSG Based On Wind Energy Conversion Systemramk1987Pas encore d'évaluation
- Flux Switching Machines A Review On Design and App 221201 004857Document7 pagesFlux Switching Machines A Review On Design and App 221201 004857Rana AtharPas encore d'évaluation
- A High-Efficiency PM-Assisted Synchronous Reluctance Motor DriveDocument6 pagesA High-Efficiency PM-Assisted Synchronous Reluctance Motor DrivejalilemadiPas encore d'évaluation
- Capacitive Power Transfer For Rotor Field Current in Synchronous MachinesDocument8 pagesCapacitive Power Transfer For Rotor Field Current in Synchronous MachinesHuong ThaoPas encore d'évaluation
- Energies 15 05501 PDFDocument15 pagesEnergies 15 05501 PDFKev NgoPas encore d'évaluation
- Influence of System Parameters Using Fuse Protection of Regenerative DC DrivesD'EverandInfluence of System Parameters Using Fuse Protection of Regenerative DC DrivesPas encore d'évaluation
- Test PDFDocument1 pageTest PDFrazarafiq033Pas encore d'évaluation
- DHA K Nursery (Database)Document8 pagesDHA K Nursery (Database)razarafiq033Pas encore d'évaluation
- EE624 Course OutlineDocument3 pagesEE624 Course Outlinerazarafiq033Pas encore d'évaluation
- Inventory Control (Excel)Document7 pagesInventory Control (Excel)razarafiq033Pas encore d'évaluation
- Muhammad Raza Rafiq.LDocument3 pagesMuhammad Raza Rafiq.Lrazarafiq033Pas encore d'évaluation
- 3 Biometric Overseas Travelling Form - V1Document1 page3 Biometric Overseas Travelling Form - V1razarafiq033Pas encore d'évaluation
- Muhammad Raza Rafiq.TDocument3 pagesMuhammad Raza Rafiq.Trazarafiq033Pas encore d'évaluation
- Muhammad Raza Rafiq .2 PDFDocument3 pagesMuhammad Raza Rafiq .2 PDFrazarafiq033Pas encore d'évaluation
- Jewllers Shop AddressDocument12 pagesJewllers Shop Addressrazarafiq033Pas encore d'évaluation
- Muhammad Ali JinnahDocument17 pagesMuhammad Ali Jinnahrazarafiq033Pas encore d'évaluation
- Muhammad Yasir RafiqDocument3 pagesMuhammad Yasir Rafiqrazarafiq033Pas encore d'évaluation
- Spring 19 MSEE Timetable 26.12..2018Document2 pagesSpring 19 MSEE Timetable 26.12..2018razarafiq033Pas encore d'évaluation
- G Semester Calendar Fall 2016Document1 pageG Semester Calendar Fall 2016razarafiq033Pas encore d'évaluation
- Cal Anderson Park Lighting StudyDocument30 pagesCal Anderson Park Lighting StudybchasescPas encore d'évaluation
- Multimode Optical Fiber Based SpectrometersDocument16 pagesMultimode Optical Fiber Based Spectrometersebn123Pas encore d'évaluation
- Induction MachinesDocument81 pagesInduction MachinesaswardiPas encore d'évaluation
- Motors and Loads: 3.1 Three Phase Asynchronous MotorsDocument1 pageMotors and Loads: 3.1 Three Phase Asynchronous MotorsHoon MiewJiePas encore d'évaluation
- 10+2 Question Bank Final PDFDocument38 pages10+2 Question Bank Final PDFS RajPas encore d'évaluation
- B. Sc. Physics (H.R.K) Chapter 49: Light and Quantum PhysicsDocument12 pagesB. Sc. Physics (H.R.K) Chapter 49: Light and Quantum PhysicsRao ShahgeerPas encore d'évaluation
- Standard DC Motor (Pg.18 35)Document19 pagesStandard DC Motor (Pg.18 35)WalidPas encore d'évaluation
- Real & Virtual Images (3.2.7) - CIE IGCSE Physics Revision Notes 2023 - Save My ExamsDocument5 pagesReal & Virtual Images (3.2.7) - CIE IGCSE Physics Revision Notes 2023 - Save My ExamsMuzzamil AbbasiPas encore d'évaluation
- Flame PhotometryDocument7 pagesFlame PhotometryHussain RizviPas encore d'évaluation
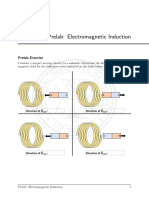
- E5 Electromagnetic Induction s2 A2324Document14 pagesE5 Electromagnetic Induction s2 A2324AJ CarambasPas encore d'évaluation
- N: C: C N .: Omework Eflection of Light Arks: AME Lass Lass ODocument3 pagesN: C: C N .: Omework Eflection of Light Arks: AME Lass Lass OJimmyisdabyo YoutubePas encore d'évaluation
- CassDocument7 pagesCassMaica A.Pas encore d'évaluation
- Short Questions Two B For Grade 12 BilingualDocument2 pagesShort Questions Two B For Grade 12 BilingualSyed Shoaib ShahPas encore d'évaluation
- Faq TermsDocument3 pagesFaq TermsUSA Light and ElectricPas encore d'évaluation
- Interaction of Light With MatterDocument6 pagesInteraction of Light With MatteraarthijayakumarPas encore d'évaluation
- Hubel and Wiesel Cat ExperimentDocument8 pagesHubel and Wiesel Cat ExperimentNijan RaviPas encore d'évaluation
- 6 2nd Quarter Module 1 Activity UV X and Gamma RaysDocument2 pages6 2nd Quarter Module 1 Activity UV X and Gamma RaysAriel RemultaPas encore d'évaluation
- Induction Motor Steady-State Model (Squirrel Cage) : MEP 1422 Electric DrivesDocument21 pagesInduction Motor Steady-State Model (Squirrel Cage) : MEP 1422 Electric DrivesSpoiala DragosPas encore d'évaluation
- Science Notes For Class 10 Chapter 11 The Human Eye and The Colourful WorldDocument3 pagesScience Notes For Class 10 Chapter 11 The Human Eye and The Colourful WorldGopal100% (3)
- Benjamin FranklinDocument10 pagesBenjamin Franklinneto rarePas encore d'évaluation
- Okumura ModelDocument4 pagesOkumura Modelchuck333Pas encore d'évaluation
- 02 CommunicationSystemsDocument48 pages02 CommunicationSystemsWiccioPas encore d'évaluation
- VAA32 RelayDocument9 pagesVAA32 RelayVikas Gupta50% (2)
- Good Practice Guide For Measurement GlossDocument86 pagesGood Practice Guide For Measurement GlossSaraswanto100% (3)
- Effects of Non-Ionizing Radiation by Hitarth Mihs-IsTARDocument26 pagesEffects of Non-Ionizing Radiation by Hitarth Mihs-IsTARHM04Pas encore d'évaluation
- Fiber Optics Ece Board ExamDocument7 pagesFiber Optics Ece Board ExamSharon CarilloPas encore d'évaluation
- Mock U2 Edexcel PDFDocument14 pagesMock U2 Edexcel PDFAhmed HossainPas encore d'évaluation
- Microwave Communication & Wave GuidesDocument46 pagesMicrowave Communication & Wave GuidesMahmoud DoughanPas encore d'évaluation
- Photoelectric EffectDocument10 pagesPhotoelectric EffectSalman ArshadPas encore d'évaluation