Vous aimerez peut-être aussi
- Torsion of Compound Bar 1960Document10 pagesTorsion of Compound Bar 1960B Raghavendra BejgamPas encore d'évaluation
- 1 s2.0 S0022039604001998 MainDocument49 pages1 s2.0 S0022039604001998 MainRock Seven Star Event ManagementPas encore d'évaluation
- Von Mises' Yield Criterion and Nonlinearly Hardening Rotating ShaftsDocument17 pagesVon Mises' Yield Criterion and Nonlinearly Hardening Rotating ShaftsAnonymous UoHUagPas encore d'évaluation
- Non-Local Continuum Mechanics and Fractional Calculus: K.A. LazopoulosDocument5 pagesNon-Local Continuum Mechanics and Fractional Calculus: K.A. Lazopoulosrs0004Pas encore d'évaluation
- Effect of Inhomogeneity On The Stress in PipesDocument11 pagesEffect of Inhomogeneity On The Stress in Pipes002 PALASH DASPas encore d'évaluation
- Stress Boundary Conditions For Plate Bending: Frederic Y.M. WanDocument17 pagesStress Boundary Conditions For Plate Bending: Frederic Y.M. Wansrinath_iitmPas encore d'évaluation
- Laio 2004Document15 pagesLaio 2004asia yasminPas encore d'évaluation
- Rubber Behaviour Static and DynamicDocument13 pagesRubber Behaviour Static and DynamicTamaduianu IoanPas encore d'évaluation
- 20 Zienkiewicz, O. C., Watson, M., and King, I. P., A Numerical Method of Visco-Elastic PDFDocument21 pages20 Zienkiewicz, O. C., Watson, M., and King, I. P., A Numerical Method of Visco-Elastic PDFTariq MahmoodPas encore d'évaluation
- Flow Through Collapsible Channel - ReferenceDocument22 pagesFlow Through Collapsible Channel - ReferenceAnees Fahim C PPas encore d'évaluation
- On The Estimation of Residual Stresses by The Crack Compliance MethodDocument8 pagesOn The Estimation of Residual Stresses by The Crack Compliance MethodGabriel Vazquez VegaPas encore d'évaluation
- Exact Solution of PDE by ADMDocument15 pagesExact Solution of PDE by ADMMuhammad Khalid HanifPas encore d'évaluation
- Zhao 1989Document27 pagesZhao 1989Beatriz MoreiraPas encore d'évaluation
- Analytical Computation of Multiple Shrink Fitted ComponentsDocument13 pagesAnalytical Computation of Multiple Shrink Fitted ComponentsParag NaikPas encore d'évaluation
- Didenkulova 2009 - Runup of Solitary Tsunami WavesDocument16 pagesDidenkulova 2009 - Runup of Solitary Tsunami Wavesroger manuel chuquizuta chuechaPas encore d'évaluation
- A Comparison On Failure Pressures of Cylindrical Pressure VesselsDocument6 pagesA Comparison On Failure Pressures of Cylindrical Pressure VesselsbahmanPas encore d'évaluation
- NOE0415380416 ch081 PDFDocument7 pagesNOE0415380416 ch081 PDFUmed Abd-alsatarPas encore d'évaluation
- Commun Nonlinear Sci Numer Simulat: Ö. SavasßDocument4 pagesCommun Nonlinear Sci Numer Simulat: Ö. SavasßMarinhoPas encore d'évaluation
- Volkersen Adhesive CalculationDocument28 pagesVolkersen Adhesive CalculationgladureePas encore d'évaluation
- Stress Effects On The Performance of Optical Waveguides: International Journal of Solids and Structures July 2003Document19 pagesStress Effects On The Performance of Optical Waveguides: International Journal of Solids and Structures July 2003sumprintinPas encore d'évaluation
- Commun Nonlinear Sci Numer Simulat: Sung-Ik SohnDocument6 pagesCommun Nonlinear Sci Numer Simulat: Sung-Ik SohnRebecca ClarkPas encore d'évaluation
- Insitustresses PDFDocument14 pagesInsitustresses PDFItzel EscalonaPas encore d'évaluation
- Closed Form Solutions For Small Deformations Superimposed Upon The Symmetrical Expansion of A Spherical ShellDocument12 pagesClosed Form Solutions For Small Deformations Superimposed Upon The Symmetrical Expansion of A Spherical ShellBensingh DhasPas encore d'évaluation
- Fluid Dynamics 69: R DG R Dy G DyDocument1 pageFluid Dynamics 69: R DG R Dy G DyDante FreidzonPas encore d'évaluation
- Stress Effects On The Performance of Optical WaveguidesDocument18 pagesStress Effects On The Performance of Optical WaveguidesnowdayPas encore d'évaluation
- Of Failure, Weak Formations Can Be Strengthened By: Oil, J 0Document9 pagesOf Failure, Weak Formations Can Be Strengthened By: Oil, J 0Hafiz AsyrafPas encore d'évaluation
- Drag of Non-Spherical Solid Particles of Regular and Irregular ShapeDocument12 pagesDrag of Non-Spherical Solid Particles of Regular and Irregular ShapenitinPas encore d'évaluation
- Esfuerzos GeostaticosDocument6 pagesEsfuerzos GeostaticosMaria VargasPas encore d'évaluation
- 26may2014 1Document16 pages26may2014 1Desai NileshPas encore d'évaluation
- TMP 105 EDocument9 pagesTMP 105 EFrontiersPas encore d'évaluation
- Junction of A Periodic Family of Elastic Rods With A Thin Plate. Part IIDocument55 pagesJunction of A Periodic Family of Elastic Rods With A Thin Plate. Part IIChristian MBOULLEPas encore d'évaluation
- Young's Modulus, Shear Modulus, and Poisson's Ratio in Silicon and GermaniumDocument5 pagesYoung's Modulus, Shear Modulus, and Poisson's Ratio in Silicon and GermaniumMisti LucasPas encore d'évaluation
- Nonlocal Theories For Bending, Buckling and Vibration of Beams - JN ReddyDocument21 pagesNonlocal Theories For Bending, Buckling and Vibration of Beams - JN ReddyShivareddy KondakindiPas encore d'évaluation
- B. Geier (2002) On The Influence of Laminate Stacking On Buckling of Composite Cylindrical Shells Subjected To Axial CompressionDocument8 pagesB. Geier (2002) On The Influence of Laminate Stacking On Buckling of Composite Cylindrical Shells Subjected To Axial Compressionmc_ensPas encore d'évaluation
- Inst of Mathematical Sciences Conditions For Wave-Like Equations. (U) Dec 79 A Bayliss-E TurkelDocument21 pagesInst of Mathematical Sciences Conditions For Wave-Like Equations. (U) Dec 79 A Bayliss-E Turkelsuvabrata_das01Pas encore d'évaluation
- Comment On Stress Boundary Conditions For Plate Be - 2006 - International JournDocument2 pagesComment On Stress Boundary Conditions For Plate Be - 2006 - International JournSamiullahPas encore d'évaluation
- Vibrations of Orthotropic Sandwich Conical Shells With Free EdgesDocument14 pagesVibrations of Orthotropic Sandwich Conical Shells With Free EdgesunlockvnPas encore d'évaluation
- giraud2007 пороупруг анизотропDocument17 pagesgiraud2007 пороупруг анизотропJ AbrPas encore d'évaluation
- Exact Ow of A Third Grade Uid Past A Porous Plate Using Homotopy Analysis MethodDocument13 pagesExact Ow of A Third Grade Uid Past A Porous Plate Using Homotopy Analysis MethodMuhammad FarooqPas encore d'évaluation
- 2007 - NJP. One Path To Acoustic CloakingDocument9 pages2007 - NJP. One Path To Acoustic CloakingDiego OliverPas encore d'évaluation
- IBP2304 - 10 RIO OIL GAS 2010 Rev 6Document10 pagesIBP2304 - 10 RIO OIL GAS 2010 Rev 6Marcelo FrydmanPas encore d'évaluation
- Measurement of Surface Tension by Lattice Parameter Changes Theory For Facetted MicrocrystalsDocument5 pagesMeasurement of Surface Tension by Lattice Parameter Changes Theory For Facetted MicrocrystalsKiran KumarPas encore d'évaluation
- Moritoki - 1996 - Intrinsic Criterion of Plastic InstabilityDocument8 pagesMoritoki - 1996 - Intrinsic Criterion of Plastic InstabilityTakis PlimirasPas encore d'évaluation
- On Some Unsteady Ows of A Non-Newtonian Uid: M. Emin Erdog An, C. Erdem - ImrakDocument11 pagesOn Some Unsteady Ows of A Non-Newtonian Uid: M. Emin Erdog An, C. Erdem - ImrakManikiranSaiPas encore d'évaluation
- Strength of Transverse Fillet Welded JointsDocument7 pagesStrength of Transverse Fillet Welded Jointshemant_durgawalePas encore d'évaluation
- Generalized Lorenz Models Routes Chaos Energy ConservingDocument15 pagesGeneralized Lorenz Models Routes Chaos Energy ConservingValeria Montserrat Maya GonzalezPas encore d'évaluation
- Study of Dynamic Properties of Rocks Around An Underground Opening Using Seismic Inverse TechniquesDocument11 pagesStudy of Dynamic Properties of Rocks Around An Underground Opening Using Seismic Inverse Techniquesavijitdey1975Pas encore d'évaluation
- UCS CorrectionDocument8 pagesUCS Correctionjagadishgeo100% (2)
- Stability and Newton's Law of Cooling in Double Diffusive FlowDocument13 pagesStability and Newton's Law of Cooling in Double Diffusive FlowM FaizanPas encore d'évaluation
- The Renormalization Group Yakhot and Smith 1992Document27 pagesThe Renormalization Group Yakhot and Smith 1992ThePriusPas encore d'évaluation
- Uluslararasi Makale-3Document21 pagesUluslararasi Makale-3Ilkay BakirtasPas encore d'évaluation
- 2005 R & I Pavlovic Influence of Rotatory Inertia and Transverse Shear On Stochastic Instability of The Cross-Ply Laminated Beam IJSS 42Document14 pages2005 R & I Pavlovic Influence of Rotatory Inertia and Transverse Shear On Stochastic Instability of The Cross-Ply Laminated Beam IJSS 42raduag7Pas encore d'évaluation
- Water Hammer With Uid-Structure Interaction in Thick-Walled PipesDocument8 pagesWater Hammer With Uid-Structure Interaction in Thick-Walled PipesAHMAD DiabPas encore d'évaluation
- A Solution For The Odd-Even Decoupling Problem in Pressure-Correction Algorithms For Variable Density OwsDocument21 pagesA Solution For The Odd-Even Decoupling Problem in Pressure-Correction Algorithms For Variable Density OwsErnesto Delfino AguirrePas encore d'évaluation
- Launder1974 - Application of The Energy-Dissipation Model of Turbulence To The Calculation of Flow Near A Spinning Disc PDFDocument7 pagesLaunder1974 - Application of The Energy-Dissipation Model of Turbulence To The Calculation of Flow Near A Spinning Disc PDFThePriusPas encore d'évaluation
- Morgan 1974Document15 pagesMorgan 1974mintillaPas encore d'évaluation
- Slope Stability Analysis Based On The Rigid FiniteDocument17 pagesSlope Stability Analysis Based On The Rigid FiniteLutfiadji Agung HidayatPas encore d'évaluation
- The Use of Intcrparticle Coordinates in Electronic Energy Calculations For Atoms and MoleculesDocument6 pagesThe Use of Intcrparticle Coordinates in Electronic Energy Calculations For Atoms and Moleculesmanuel.araya.floresPas encore d'évaluation
- A Generalized Method For Predicting TheDocument3 pagesA Generalized Method For Predicting TheJosé Alberto Campos MartinezPas encore d'évaluation
- Staveley Sensors Inc.: PowerstationDocument35 pagesStaveley Sensors Inc.: PowerstationJohn Choquemaque MendozaPas encore d'évaluation
- Experimental Test of Circular Hollow Sections Solid Flanged SpliceDocument5 pagesExperimental Test of Circular Hollow Sections Solid Flanged Spliceoxxy22Pas encore d'évaluation
- Elvin-Structures Subjected To Startup and Shutdown of Rotating MachineryDocument9 pagesElvin-Structures Subjected To Startup and Shutdown of Rotating MachineryRm1262Pas encore d'évaluation
- Arch324 w09 Lecture Unit5Document22 pagesArch324 w09 Lecture Unit5Ama DavidescuPas encore d'évaluation
- FBL Series 07012022 PANTONE EN LRDocument4 pagesFBL Series 07012022 PANTONE EN LRoxxy22Pas encore d'évaluation
- Tur.3012.0919 Dyrhh Steam TurbineDocument2 pagesTur.3012.0919 Dyrhh Steam TurbineSerge RINAUDOPas encore d'évaluation
- 1806 10081Document29 pages1806 10081oxxy22Pas encore d'évaluation
- 54 Enterprise Non Public Network (Private Network)Document2 pages54 Enterprise Non Public Network (Private Network)Fabrizio BaezPas encore d'évaluation
- Elastic Foundation StiffnessDocument6 pagesElastic Foundation StiffnesstigerpumaPas encore d'évaluation
- Field Test v2 ManualDocument24 pagesField Test v2 Manualoxxy22Pas encore d'évaluation
- Astm D2196-10Document5 pagesAstm D2196-10Bryan de BarrosPas encore d'évaluation
- Practical MagnetotelluricsDocument14 pagesPractical MagnetotelluricsjesaduPas encore d'évaluation
- 2023 - PPS Prelim02Document7 pages2023 - PPS Prelim02Mrdark WarriorPas encore d'évaluation
- 2018 (Vuorien Et Al)Document20 pages2018 (Vuorien Et Al)gowthami mPas encore d'évaluation
- Calculating Speed Time and Distance (3) .PPT 3rd Quarter Math 6Document25 pagesCalculating Speed Time and Distance (3) .PPT 3rd Quarter Math 6Wilma Ganit BalasPas encore d'évaluation
- Structure and Bonding in Crystalline Materials - G. Rohrer (Cambridge, 2004) WW PDFDocument552 pagesStructure and Bonding in Crystalline Materials - G. Rohrer (Cambridge, 2004) WW PDFOmar Alejandro Salazar0% (1)
- Ucsp Collage MakingDocument2 pagesUcsp Collage MakingDiona MacasaquitPas encore d'évaluation
- TOPAS 5 Technical Reference - UnlockedDocument247 pagesTOPAS 5 Technical Reference - UnlockedEdilberPas encore d'évaluation
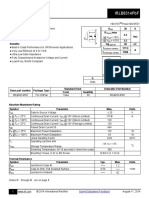
- Irlb8314Pbf: Application V 30 V R Max 2.4 M 3.2 QG 40 NC I 171 A I 130ADocument8 pagesIrlb8314Pbf: Application V 30 V R Max 2.4 M 3.2 QG 40 NC I 171 A I 130AJosè Miguel López RodriguezPas encore d'évaluation
- An Introduction: Edited by Matt Berry and Chris HodgsonDocument42 pagesAn Introduction: Edited by Matt Berry and Chris HodgsonezgiiPas encore d'évaluation
- Lecture 8 Data Sources in GISDocument32 pagesLecture 8 Data Sources in GISkhakhamasetiPas encore d'évaluation
- AD Sun and Wind DirectionDocument6 pagesAD Sun and Wind DirectionKeena Perez100% (1)
- Medical Ethics in Clinical PracticeDocument216 pagesMedical Ethics in Clinical PracticeSonali MishraPas encore d'évaluation
- Physics (Mass, Weight and Density)Document2 pagesPhysics (Mass, Weight and Density)TVPas encore d'évaluation
- College For Research and Technology of Cabanatuan: Del Pilar ST., Cabanatuan CityDocument2 pagesCollege For Research and Technology of Cabanatuan: Del Pilar ST., Cabanatuan CityLove JcwPas encore d'évaluation
- Unit 6 (Photosynthesis) - Worksheet Answer KeyDocument3 pagesUnit 6 (Photosynthesis) - Worksheet Answer Keysadia.klassonPas encore d'évaluation
- Chase Evan Oliphant BiographyDocument1 pageChase Evan Oliphant Biographyapi-248803155Pas encore d'évaluation
- Grammar Subject For Elementary - 5th Grade - Coordinating Conjunctions by SlidesgoDocument56 pagesGrammar Subject For Elementary - 5th Grade - Coordinating Conjunctions by SlidesgoAr NitaPas encore d'évaluation
- Mini - First Lecture SymmetryDocument19 pagesMini - First Lecture SymmetryKhaled AbeedPas encore d'évaluation
- Endterm QAM II 2019 BCFDocument3 pagesEndterm QAM II 2019 BCFABHISHEK KUMAR SINGHPas encore d'évaluation
- Sedimentologi - Transport Dan Pengendapan Sedimen Silisiklastik PDFDocument45 pagesSedimentologi - Transport Dan Pengendapan Sedimen Silisiklastik PDFIndah LestariPas encore d'évaluation
- Chapter Sixteen: Organization Change and DevelopmentDocument17 pagesChapter Sixteen: Organization Change and DevelopmentJAKANPas encore d'évaluation
- (Solved) QUESTION ONE Brick by Brick (BBB) Is A BuildingDocument6 pages(Solved) QUESTION ONE Brick by Brick (BBB) Is A BuildingBELONG TO VIRGIN MARYPas encore d'évaluation
- FLS OM KPI Handbook Work 2012 Version 7 PDFDocument37 pagesFLS OM KPI Handbook Work 2012 Version 7 PDFTARPas encore d'évaluation
- NCERT Solutions Class 7 Science Chapter 15 LightDocument5 pagesNCERT Solutions Class 7 Science Chapter 15 LightJAI PRAJEN PRO HACKERPas encore d'évaluation
- DissertationDocument193 pagesDissertationCARLA VIZARRETA PISSANIPas encore d'évaluation
- R G M College of Engineering & R G M College of Engineering &technology TechnologyDocument1 pageR G M College of Engineering & R G M College of Engineering &technology TechnologyAyanwale-cole pelumi AkeemPas encore d'évaluation
- Mathematics: Quarter 1 - Module 4: Properties of Operations On The Set of IntegersDocument25 pagesMathematics: Quarter 1 - Module 4: Properties of Operations On The Set of Integersarnel paghacian100% (1)
- Bid Documents 2022Document17 pagesBid Documents 2022Arlene VillarosaPas encore d'évaluation
- Atomic StructureDocument28 pagesAtomic StructureIsrael PopePas encore d'évaluation