Vous aimerez peut-être aussi
- Análisis Modal Espectral en Estructuras Con Aisladores ElastoméricosDocument25 pagesAnálisis Modal Espectral en Estructuras Con Aisladores ElastoméricosJenniffer SalazarPas encore d'évaluation
- Diseño Estructural Por Desplazamiendos para Sistemas de Multiples Grados de LibertadDocument15 pagesDiseño Estructural Por Desplazamiendos para Sistemas de Multiples Grados de LibertadheribertoparadaPas encore d'évaluation
- Codigo LatexDocument8 pagesCodigo Latexluis baque tumbacoPas encore d'évaluation
- Analisis Matricial de Un Portico en Una Edificacion de 3 NivelesDocument7 pagesAnalisis Matricial de Un Portico en Una Edificacion de 3 NivelesNicolai Torres Angulo33% (3)
- Determinación de frecuencias propias y grados de amortiguamientoDocument11 pagesDeterminación de frecuencias propias y grados de amortiguamientoKaren GabrielePas encore d'évaluation
- Amortiguamiento Estructural. Dr. Dionisio BernalDocument40 pagesAmortiguamiento Estructural. Dr. Dionisio BernalJaime CoronellPas encore d'évaluation
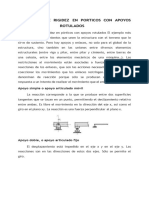
- Informe Metodo de Riridez en Portico Con Apoyo RotuladoDocument24 pagesInforme Metodo de Riridez en Portico Con Apoyo RotuladoviajerostraveltarapotoPas encore d'évaluation
- Condensacion Estatica - CinematicaDocument10 pagesCondensacion Estatica - CinematicaLuis Ypanaque TinedoPas encore d'évaluation
- Informe SismicaDocument52 pagesInforme SismicaDiego PlasenciaPas encore d'évaluation
- MetodosDocument32 pagesMetodosDavid Rraa100% (1)
- Armaduras en 3d TeoríaDocument7 pagesArmaduras en 3d TeoríaGenrri Huamani TacoPas encore d'évaluation
- Analisis de Vigas Con Rotulas. Analisis Matricial de Vigas Con Seccion VariableDocument32 pagesAnalisis de Vigas Con Rotulas. Analisis Matricial de Vigas Con Seccion Variable01-IC-HU-CRISTOPPER YUDER HUAMAN CARDENASPas encore d'évaluation
- Amortiguamiento DinámicaDocument22 pagesAmortiguamiento DinámicaDeivy RoquePas encore d'évaluation
- Análisis de porticos mediante método matricialDocument54 pagesAnálisis de porticos mediante método matricialNe InPas encore d'évaluation
- Mate Avanzada 3.8Document9 pagesMate Avanzada 3.8danielPas encore d'évaluation
- Trabajo Individual - Benites Palomino LeeannDocument22 pagesTrabajo Individual - Benites Palomino Leeannleeann benitesPas encore d'évaluation
- Método rigidez matricesDocument7 pagesMétodo rigidez matricesKarol Sotomayor Gonzales100% (1)
- Guía 2-Con SolucionesDocument21 pagesGuía 2-Con SolucionesEsteban MiguelPas encore d'évaluation
- Parcial 2 DinamicaDocument6 pagesParcial 2 DinamicaDaniela NovaPas encore d'évaluation
- Amortiguador Histeretico Con Movimiento Del SueloDocument8 pagesAmortiguador Histeretico Con Movimiento Del SueloRoger RodriguezPas encore d'évaluation
- Taller Metodo Matricial de VigasDocument10 pagesTaller Metodo Matricial de VigasJesus MoralesPas encore d'évaluation
- Deber Codigo ConsultaDocument14 pagesDeber Codigo ConsultaCarla ToapantaPas encore d'évaluation
- Dionisio BernalDocument17 pagesDionisio BernalCarlos Mario Arango SossaPas encore d'évaluation
- Algebra LinealDocument12 pagesAlgebra LinealDeivid DavilaPas encore d'évaluation
- Metodos Numericos en Analisis ModalesDocument20 pagesMetodos Numericos en Analisis ModalesRamós Girón CarlosPas encore d'évaluation
- 2° Examen Desarrollado - SísmicaDocument23 pages2° Examen Desarrollado - Sísmicaleiner medina herreraPas encore d'évaluation
- Trabajo Oscilaciones AmortiguadasDocument3 pagesTrabajo Oscilaciones Amortiguadas210117Pas encore d'évaluation
- Informe Tarea 6Document10 pagesInforme Tarea 6Gloria SolartePas encore d'évaluation
- Vibración libre con amortiguamientoDocument16 pagesVibración libre con amortiguamientoEvelyn Vergaray ColoniaPas encore d'évaluation
- Metodo Del Coeficiente de Desplazamiento para El ADocument11 pagesMetodo Del Coeficiente de Desplazamiento para El ASigfridoLogesPas encore d'évaluation
- Metodo de RotacionesDocument33 pagesMetodo de RotacionesGauddy Eleamelis Arcila Mora88% (8)
- 4463 20193 1 PBDocument25 pages4463 20193 1 PBwillian mendozaPas encore d'évaluation
- Trabajo de A2Document32 pagesTrabajo de A2yimy valen ciaPas encore d'évaluation
- Análisis modal dinámico y combinación modalDocument5 pagesAnálisis modal dinámico y combinación modalPietrek ZarekPas encore d'évaluation
- Elementos Biarticulados en Una DimensiónDocument14 pagesElementos Biarticulados en Una DimensiónAna Sofia Hermoza VasquezPas encore d'évaluation
- pedro 2Document26 pagespedro 2Kenny Hernandez RodriguezPas encore d'évaluation
- Cuaderno 13 Metodos de Analisis Sismico II Analisis Sismico ModalDocument17 pagesCuaderno 13 Metodos de Analisis Sismico II Analisis Sismico Modalebas1961100% (1)
- Evaluación de Los Valores para El Coeficiente de Disipación de EnergíaDocument15 pagesEvaluación de Los Valores para El Coeficiente de Disipación de EnergíaJuan Mario Guevara PenarandaPas encore d'évaluation
- Trabajo de Responsabilidad Social II, Torres.Document8 pagesTrabajo de Responsabilidad Social II, Torres.arnoltorres1128Pas encore d'évaluation
- Alvaro Canaruma Trabajo 2 Corte 2 Vibraciones de Maquinas SistemasDocument7 pagesAlvaro Canaruma Trabajo 2 Corte 2 Vibraciones de Maquinas SistemasAzett GzPas encore d'évaluation
- Taller (I) - SoluciónDocument47 pagesTaller (I) - SoluciónJairo Andres GuaquetaPas encore d'évaluation
- Análisis Dinámico de Una EstructuraDocument8 pagesAnálisis Dinámico de Una EstructuraPaola Flores VidaurrePas encore d'évaluation
- Tipos de Cerchas (Pratt, Warren)Document10 pagesTipos de Cerchas (Pratt, Warren)Ivanjob Tapia (ivanjob22)Pas encore d'évaluation
- Propiedades Ortogonales en Sistemas VibratoriosDocument14 pagesPropiedades Ortogonales en Sistemas VibratoriosLuis CarlosPas encore d'évaluation
- Análisis Del Sistema Masa Del ResorteDocument19 pagesAnálisis Del Sistema Masa Del ResorteAlexander Picon FabianPas encore d'évaluation
- U4 - Método de Rigidez en Vigas y PórticosDocument88 pagesU4 - Método de Rigidez en Vigas y PórticosArturoBaldéon75% (4)
- Distribución óptima amortiguadores viscosos estructurasDocument5 pagesDistribución óptima amortiguadores viscosos estructurasCarlosMartinezPas encore d'évaluation
- Valores y Vectores Caracteristicos en Dinamica de EstructurasDocument13 pagesValores y Vectores Caracteristicos en Dinamica de EstructurasOscarPas encore d'évaluation
- Vibración AislamientoDocument5 pagesVibración AislamientoYasmany AguilarPas encore d'évaluation
- COMPLEMENTODocument9 pagesCOMPLEMENTOAriel plutarco cardoso herreraPas encore d'évaluation
- Análisis Sísmico A Sistemas de Pórticos Resistentes ADocument48 pagesAnálisis Sísmico A Sistemas de Pórticos Resistentes AStephanie MoralesPas encore d'évaluation
- Tercer Trabajo Sismo ResistenciaDocument19 pagesTercer Trabajo Sismo ResistenciaSaul CardozaPas encore d'évaluation
- Articulo-Cristhian Montiel - Ayala - FINALDocument24 pagesArticulo-Cristhian Montiel - Ayala - FINALGAyalaMPas encore d'évaluation
- Analisis Modal EspectralDocument16 pagesAnalisis Modal EspectralAlex Santa Cruz VargasPas encore d'évaluation
- Analisis Matricial de Un PorticoDocument34 pagesAnalisis Matricial de Un PorticoJuan Carlos Chavez100% (1)
- Guía para el análisis y solución de problemas de resistencia de materialesD'EverandGuía para el análisis y solución de problemas de resistencia de materialesPas encore d'évaluation
- Análisis estructural mediante el método de los elementos finitos. Introducción al comportamiento lineal elásticoD'EverandAnálisis estructural mediante el método de los elementos finitos. Introducción al comportamiento lineal elásticoÉvaluation : 4.5 sur 5 étoiles4.5/5 (12)
- Sistemas de puesta a tierra: Diseñado con IEEE-80 y evaluado con MEFD'EverandSistemas de puesta a tierra: Diseñado con IEEE-80 y evaluado con MEFÉvaluation : 4.5 sur 5 étoiles4.5/5 (7)
- DiseñocivilDocument25 pagesDiseñocivilJose Luis Velasco CadavidPas encore d'évaluation
- DiseñoelecDocument50 pagesDiseñoelecJose Luis Velasco CadavidPas encore d'évaluation
- 14.constructores MVRestrepo CBolivarDocument16 pages14.constructores MVRestrepo CBolivarJose Luis Velasco CadavidPas encore d'évaluation
- Código ACI 318-99 requisitosDocument52 pagesCódigo ACI 318-99 requisitosGabriel Zamora Pulgar100% (3)
- MANUAL EPWIN FinalDocument40 pagesMANUAL EPWIN FinalJose Luis Velasco CadavidPas encore d'évaluation
- 109Document18 pages109reveal_83Pas encore d'évaluation
- ICCVDocument68 pagesICCVJz JonaPas encore d'évaluation
- DiseñomecanicoDocument6 pagesDiseñomecanicoJose Luis Velasco CadavidPas encore d'évaluation
- Manual de StaadDocument244 pagesManual de Staaderickline1Pas encore d'évaluation
- GuiaVIS InurbeDocument24 pagesGuiaVIS InurbeErjobemoPas encore d'évaluation
- Especifaciones Cruces PerforadosDocument28 pagesEspecifaciones Cruces PerforadosJose Luis Velasco CadavidPas encore d'évaluation
- Información SeminarioDocument2 pagesInformación SeminarioJose Luis Velasco CadavidPas encore d'évaluation
- Piping ClassDocument27 pagesPiping ClassJose Luis Velasco CadavidPas encore d'évaluation
- MANUAL EPWIN FinalDocument40 pagesMANUAL EPWIN FinalJose Luis Velasco CadavidPas encore d'évaluation
- ECP-GTP-F-38-NIP-30-01-0 Concreto PDFDocument23 pagesECP-GTP-F-38-NIP-30-01-0 Concreto PDFadrisierraPas encore d'évaluation
- ECP-GTP-F-38-NIP-61-01-0 Sist - Puesta.TierraDocument8 pagesECP-GTP-F-38-NIP-61-01-0 Sist - Puesta.Tierracarlosgerman2008Pas encore d'évaluation
- ECP-GTP-F-38-NIP-30-02-0 Morteros PDFDocument6 pagesECP-GTP-F-38-NIP-30-02-0 Morteros PDFJuan Sebastián CastroPas encore d'évaluation
- Civ-001 Estudios de SuelosDocument3 pagesCiv-001 Estudios de SuelosJose Luis Velasco CadavidPas encore d'évaluation
- Ataque Químico Al Concreto r0Document23 pagesAtaque Químico Al Concreto r0Jose Luis Velasco CadavidPas encore d'évaluation
- Ataque Químico Al Concreto r0Document23 pagesAtaque Químico Al Concreto r0Jose Luis Velasco CadavidPas encore d'évaluation
- Catalogo CinduDocument19 pagesCatalogo CinduJose Luis Velasco CadavidPas encore d'évaluation
- Metodo de Aplicacion de Grouts J.rendonDocument67 pagesMetodo de Aplicacion de Grouts J.rendonJose Luis Velasco CadavidPas encore d'évaluation
- Cirsoc 302Document107 pagesCirsoc 302Jose Luis Velasco CadavidPas encore d'évaluation
- 3 11 2010 2 42 15 PM Et-652Document23 pages3 11 2010 2 42 15 PM Et-652Jose Luis Velasco CadavidPas encore d'évaluation
- Inelectra INEDON: Criterios de Diseño para Edificios A Prueba de Explosion (Cuartos de Control)Document22 pagesInelectra INEDON: Criterios de Diseño para Edificios A Prueba de Explosion (Cuartos de Control)Jose Luis Velasco CadavidPas encore d'évaluation
- Norma Diseño Estructural PanamecvDocument9 pagesNorma Diseño Estructural PanamecvJose Luis Velasco CadavidPas encore d'évaluation
- GCMC CA 11 00 Catalogo Seguridad Industrial SyzDocument12 pagesGCMC CA 11 00 Catalogo Seguridad Industrial SyzJose Luis Velasco CadavidPas encore d'évaluation
- 1-Reglamento 201-2005 Completo PDFDocument642 pages1-Reglamento 201-2005 Completo PDFMarcelo PaganoPas encore d'évaluation
- CadDocument507 pagesCadJuan Rubén Cueva SalaverryPas encore d'évaluation
- Tabla de DerivadasDocument1 pageTabla de DerivadascuakyPas encore d'évaluation
- Conceptos Sobre AnaulidadesDocument4 pagesConceptos Sobre AnaulidadesIndira Carolina100% (1)
- Au Folleto 15Document31 pagesAu Folleto 15Paul PoncePas encore d'évaluation
- ANUALIDADES GENERALES CompletoDocument4 pagesANUALIDADES GENERALES CompletoMayra Flores Delgado40% (5)
- RedondeoDocument27 pagesRedondeoJTENORIOPas encore d'évaluation
- Planificacion de UnidadDocument4 pagesPlanificacion de UnidadPedro Pablo Vassa100% (1)
- M7 Potenciacion y Radicacion de EnterosDocument1 pageM7 Potenciacion y Radicacion de EnterosAnita V. Diaz LopezPas encore d'évaluation
- Números positivos, negativos y el ceroDocument196 pagesNúmeros positivos, negativos y el ceroSalvador Jaime Guevara0% (1)
- Curva - de Fractal PDFDocument122 pagesCurva - de Fractal PDFnestorGPas encore d'évaluation
- Modelado de Sistemas Dinamicos A Partir de Datos EDocument4 pagesModelado de Sistemas Dinamicos A Partir de Datos EMichelle GüizaPas encore d'évaluation
- Actividad de Puntos Evaluables Escenario 5 PRIMER BLOQUE TEORICO PDFDocument5 pagesActividad de Puntos Evaluables Escenario 5 PRIMER BLOQUE TEORICO PDFPedroPas encore d'évaluation
- Evaluación de Opratoria Combinada 5 AñoDocument2 pagesEvaluación de Opratoria Combinada 5 AñoGeorgette Alejandra Faúndez LealPas encore d'évaluation
- Est II Catorceava Clase 2S 2021Document13 pagesEst II Catorceava Clase 2S 2021Mariana Rivas GuardiaPas encore d'évaluation
- Formación Básica 1Document14 pagesFormación Básica 1Kathleen PricePas encore d'évaluation
- Fórmulas Coordenadas Curvilíneas y Elementos DiferencialesDocument11 pagesFórmulas Coordenadas Curvilíneas y Elementos DiferencialesDavid CoelloPas encore d'évaluation
- Guia de Ejercicios 1Document8 pagesGuia de Ejercicios 1EdunetPas encore d'évaluation
- 5°-Guía 7 Matemáticas, Docente Wilmer CortésDocument5 pages5°-Guía 7 Matemáticas, Docente Wilmer Cortésmiguel cuevaPas encore d'évaluation
- UNIDAD 1 Introduccion A La InvestigacionDocument35 pagesUNIDAD 1 Introduccion A La InvestigacionJoshua ACPas encore d'évaluation
- Diferenciabilidad - Ejercicios PropuestosDocument2 pagesDiferenciabilidad - Ejercicios PropuestosSebastian Rey BrancaPas encore d'évaluation
- Diagrama de Barras y Tipos de CurvasDocument8 pagesDiagrama de Barras y Tipos de CurvasRiz JloPas encore d'évaluation
- Sem 9 1idobles y VolumenesDocument7 pagesSem 9 1idobles y VolumenesDennis PaúlPas encore d'évaluation
- Ley de Gauss: Carga y flujo eléctricoDocument28 pagesLey de Gauss: Carga y flujo eléctricoLuis GomzPas encore d'évaluation
- Baez 2007 PrincipiosDocument20 pagesBaez 2007 PrincipiosVladimir PatiñoPas encore d'évaluation
- Ejercicios Determinantes SelectividadDocument10 pagesEjercicios Determinantes SelectividadJUAN DAVID CORTÉS OSSAPas encore d'évaluation
- 14 y 15 Analisis Del Controlador PID y Repaso LGR BODEDocument85 pages14 y 15 Analisis Del Controlador PID y Repaso LGR BODEMIJAELPas encore d'évaluation
- Informe 2 Lab PlanchaDocument32 pagesInforme 2 Lab PlanchaAlexis Olivares MirandaPas encore d'évaluation
- Multiplicación de Fracciones para Segundo de SecundariaDocument5 pagesMultiplicación de Fracciones para Segundo de SecundariaGerman Enrique Chacon CastilloPas encore d'évaluation
- Solucion - Tarea ProbabilidadesDocument7 pagesSolucion - Tarea ProbabilidadesDILAS CORDOVA DANTE NOEPas encore d'évaluation
- Semana 12 Sesion 2Document18 pagesSemana 12 Sesion 2ALEJANDRO MIGUEL ZAPATA LAIMEPas encore d'évaluation
- Matematización Horizontal Mate en HolandaDocument51 pagesMatematización Horizontal Mate en Holandaabraxas540Pas encore d'évaluation