Vous aimerez peut-être aussi
- Modeling Material Damping Properties in AnsysDocument16 pagesModeling Material Damping Properties in AnsysNono_geotec100% (1)
- Strength of Materials and Structures: An Introduction to the Mechanics of Solids and StructuresD'EverandStrength of Materials and Structures: An Introduction to the Mechanics of Solids and StructuresÉvaluation : 4 sur 5 étoiles4/5 (1)
- Vibration Lec2Document15 pagesVibration Lec2Dipesh baral0% (1)
- Lecture 1dDocument9 pagesLecture 1dYusuf GulPas encore d'évaluation
- Fu 1998Document19 pagesFu 1998nevinkoshyPas encore d'évaluation
- Question Paper Nov Dec 2018Document32 pagesQuestion Paper Nov Dec 2018VICTORYSUBIKSHIPas encore d'évaluation
- Benaroya - Capítulo 5Document76 pagesBenaroya - Capítulo 5Lucas SilvaPas encore d'évaluation
- Effect of Gravity On The Vibration of Vertical Cantilevers PDFDocument6 pagesEffect of Gravity On The Vibration of Vertical Cantilevers PDFstormstonePas encore d'évaluation
- EM - ES.5: Experiment No. (1) Simple Pendulum 1.1 ObjectiveDocument41 pagesEM - ES.5: Experiment No. (1) Simple Pendulum 1.1 ObjectivehasoonyaliPas encore d'évaluation
- Direct Analysis Method: Project: DescriptionDocument15 pagesDirect Analysis Method: Project: DescriptionMarkPas encore d'évaluation
- Outline of Lecture 9: Continuous SystemsDocument68 pagesOutline of Lecture 9: Continuous SystemsStudent ForeignPas encore d'évaluation
- Heat and Mass TransferDocument69 pagesHeat and Mass Transfervh11113mech21Pas encore d'évaluation
- 6 Problemsgroup 2Document8 pages6 Problemsgroup 2Alhji AhmedPas encore d'évaluation
- Oneil StrengthsDocument22 pagesOneil StrengthsOneil Prettyboyswagg LeitchPas encore d'évaluation
- Material Damping PropertiesDocument16 pagesMaterial Damping Propertiessamiran237Pas encore d'évaluation
- 1999RIGAUD EffectsGearboxDesignParametersDocument6 pages1999RIGAUD EffectsGearboxDesignParametersSh.nasirpurPas encore d'évaluation
- 2261-Article Text-9962-1-10-20110615Document17 pages2261-Article Text-9962-1-10-20110615Bagus DharmaPas encore d'évaluation
- GeCAA Team Competition PIXIE PDFDocument5 pagesGeCAA Team Competition PIXIE PDFRah-ul Ranj-an S-ahPas encore d'évaluation
- Terebilo 1998 0399Document5 pagesTerebilo 1998 0399Particle Beam Physics LabPas encore d'évaluation
- 14 - 15 - H2 - Oscillations - Notes - LecturingDocument41 pages14 - 15 - H2 - Oscillations - Notes - LecturingeltytanPas encore d'évaluation
- Problem Set No 1 in CE226Document1 pageProblem Set No 1 in CE226Alyfer del RosarioPas encore d'évaluation
- Force Transmissibility of A Nonlinear Vibration Isolator With High-Static-Low-Dynamic-StiffnessDocument7 pagesForce Transmissibility of A Nonlinear Vibration Isolator With High-Static-Low-Dynamic-StiffnesshamadeePas encore d'évaluation
- Multiscale Transforms: Wavelets, Ridgelets, Curvelets, EtcDocument34 pagesMultiscale Transforms: Wavelets, Ridgelets, Curvelets, EtcarjunPas encore d'évaluation
- 5 Application of Complex Number in Marine Engineering FieldDocument19 pages5 Application of Complex Number in Marine Engineering Fieldainul sufiahPas encore d'évaluation
- Vibration HW#2Document2 pagesVibration HW#2Narasimha Reddy100% (1)
- Lecture 11Document41 pagesLecture 11Gabriel NdandaniPas encore d'évaluation
- Appendix D 2008Document14 pagesAppendix D 2008Daniel LiawPas encore d'évaluation
- Fiz3 FoyDocument62 pagesFiz3 FoyCeren DENİZPas encore d'évaluation
- Vibration TheoryDocument24 pagesVibration TheoryWolfwood ManilagPas encore d'évaluation
- 2008 MOVIC DohnalMaceDocument11 pages2008 MOVIC DohnalMaceChiara GastaldiPas encore d'évaluation
- Spring Mass Experiment Student SheetDocument8 pagesSpring Mass Experiment Student SheetThảo Hà NguyễnPas encore d'évaluation
- Lab 03 Rotational SystemsDocument4 pagesLab 03 Rotational SystemsAlejandra M. AvilaPas encore d'évaluation
- Free VibrationDocument11 pagesFree VibrationEz99Pas encore d'évaluation
- CEI SD 100 Structural Dynamics LR02newDocument23 pagesCEI SD 100 Structural Dynamics LR02newSahar Aktham RashedPas encore d'évaluation
- Dynamic AnalysisDocument16 pagesDynamic AnalysismshPas encore d'évaluation
- Forced Oscillations Lab Report Draft 1Document13 pagesForced Oscillations Lab Report Draft 1Praveen Dennis XavierPas encore d'évaluation
- Sample Physics Lab ReportDocument8 pagesSample Physics Lab ReportAnonymous zF7oT5GrPas encore d'évaluation
- CH 1-3Document19 pagesCH 1-3alayuPas encore d'évaluation
- VibrationDocument46 pagesVibrationatulsemiloPas encore d'évaluation
- Stepny of The Ass Ques Oscillation 2Document28 pagesStepny of The Ass Ques Oscillation 2Vinod Kumar KumarPas encore d'évaluation
- Smart Materials and Structures: International WorkshopDocument10 pagesSmart Materials and Structures: International WorkshopPartha SarathiiPas encore d'évaluation
- Chapter 13Document14 pagesChapter 13Adrian PredaPas encore d'évaluation
- Unit V VibrationsDocument74 pagesUnit V VibrationsamritaPas encore d'évaluation
- Free and Forced Vibration of A Single Degree of Freedom Mechanical SystemDocument8 pagesFree and Forced Vibration of A Single Degree of Freedom Mechanical SystemburakPas encore d'évaluation
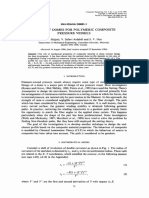
- Design of Domes For Polymeric Composite Pressure Vessels-Hojjati1995Document9 pagesDesign of Domes For Polymeric Composite Pressure Vessels-Hojjati1995Hiến Đinh VănPas encore d'évaluation
- Advanced Mechanics of Solids by Arthur P Boresi & Schmidth 6 EdDocument8 pagesAdvanced Mechanics of Solids by Arthur P Boresi & Schmidth 6 EdChaitanya RamPas encore d'évaluation
- Experiment No 2Document5 pagesExperiment No 2saish sakharkarPas encore d'évaluation
- Allied Physics - I (17upha01)Document94 pagesAllied Physics - I (17upha01)Bharathi MathsPas encore d'évaluation
- On Free and Forced Vibration of Beam-Strings Using Wave-Based Transfer MatricesDocument34 pagesOn Free and Forced Vibration of Beam-Strings Using Wave-Based Transfer MatricesSoumyajit RoyPas encore d'évaluation
- Finite Element Analysis: Level 6, Semester 1&2 2022-2023Document23 pagesFinite Element Analysis: Level 6, Semester 1&2 2022-2023Sara HaiderPas encore d'évaluation
- University Physics: Waves and Electricity: Ch15. Simple Harmonic MotionDocument29 pagesUniversity Physics: Waves and Electricity: Ch15. Simple Harmonic MotionBenny Damas PutraPas encore d'évaluation
- Reduction of Live Loads and ACI Coefficient: Structural TheoryDocument6 pagesReduction of Live Loads and ACI Coefficient: Structural TheoryAllan Añavisa Ostique Jr.Pas encore d'évaluation
- CXC Physics CAPE FormulasDocument9 pagesCXC Physics CAPE Formulasjabarivalo5Pas encore d'évaluation
- Issue 10-Elastic Wood Properties From Dynamic Tests and Computer Modeling PDFDocument14 pagesIssue 10-Elastic Wood Properties From Dynamic Tests and Computer Modeling PDFChristian ViauPas encore d'évaluation
- forestPHY PAPER-I 0 PDFDocument8 pagesforestPHY PAPER-I 0 PDFKHUSHBUPas encore d'évaluation
- 18ECE302T-U2-L13 Flexural Beam Bending Analysis Under Single Loading ConditionDocument11 pages18ECE302T-U2-L13 Flexural Beam Bending Analysis Under Single Loading Conditionamitava2010Pas encore d'évaluation
- Nonlinear Response of A Moored BuoyDocument22 pagesNonlinear Response of A Moored BuoyIoannis MitsisPas encore d'évaluation
- Ultrasonic SolutionDocument46 pagesUltrasonic Solutionsoumyadev86% (14)
- SPE 110014 A Compendium of Directional Calculations Based On The Minimum Curvature Method: Part 2Document16 pagesSPE 110014 A Compendium of Directional Calculations Based On The Minimum Curvature Method: Part 2Rohit ImandíPas encore d'évaluation
- Tic 106Document4 pagesTic 106maiconandradecruzPas encore d'évaluation
- Thermal Physics - Prof. Golam Dastegir Al QuaderiDocument1 133 pagesThermal Physics - Prof. Golam Dastegir Al QuaderiFatin IshraquePas encore d'évaluation
- Questions & Answers: For For For For For NEET (UG) - 2020 (Phase-2)Document22 pagesQuestions & Answers: For For For For For NEET (UG) - 2020 (Phase-2)DonPas encore d'évaluation
- Solubilities of NaCl, KCL, LiCl, and LiBrDocument8 pagesSolubilities of NaCl, KCL, LiCl, and LiBrnour_b_bPas encore d'évaluation
- Center of GravityDocument16 pagesCenter of GravityAbdul Ghafoor BhattiPas encore d'évaluation
- NewDocument7 pagesNewmohibharPas encore d'évaluation
- 1 Periodical Test in Science 8Document4 pages1 Periodical Test in Science 8Jessa Mae Banquirig50% (2)
- Radioactivity 1 QPDocument9 pagesRadioactivity 1 QPShelly EdwardsPas encore d'évaluation
- S3 KTU-Solid State Devices Module 1Document15 pagesS3 KTU-Solid State Devices Module 1nadheera ayisha67% (3)
- Nannoplankton 1Document73 pagesNannoplankton 1Desi Vivi Janna Pakpahan0% (1)
- 9J Quick QuizDocument2 pages9J Quick QuizOneth RajapaksePas encore d'évaluation
- 90 010 0000002rev004Document5 pages90 010 0000002rev004Cleverson BorghezanPas encore d'évaluation
- Kerala Plus Two Model Exam Question Paper March 2021 - PHYSICSDocument11 pagesKerala Plus Two Model Exam Question Paper March 2021 - PHYSICSvelavanPas encore d'évaluation
- Prelim (2) - Physics-1 ModuleDocument52 pagesPrelim (2) - Physics-1 ModuleHerrera, Mark NathanielPas encore d'évaluation
- Additives and AdmixturesDocument38 pagesAdditives and AdmixturesAhsan BuriroPas encore d'évaluation
- Lab Report AbcnDocument13 pagesLab Report Abcnapi-427928576Pas encore d'évaluation
- Radio PharmacologyDocument32 pagesRadio PharmacologyKaise GuerreroPas encore d'évaluation
- Discovery of Electron: The Atomic StructureDocument3 pagesDiscovery of Electron: The Atomic Structurejohn100% (1)
- Nonlinear Dynamical Systems and Control - A Lyapunov Based ApproachDocument4 pagesNonlinear Dynamical Systems and Control - A Lyapunov Based Approachosnarf706Pas encore d'évaluation
- Blasius PDFDocument2 pagesBlasius PDFvtn_severPas encore d'évaluation
- New Microsoft Word DocumentDocument2 pagesNew Microsoft Word DocumentZia KhanPas encore d'évaluation
- Advanced Material Modeling in AbaqusDocument13 pagesAdvanced Material Modeling in AbaqusUdhamPas encore d'évaluation
- Electromagnetic Compatibility Essentials v1-02Document145 pagesElectromagnetic Compatibility Essentials v1-02cyo3fffPas encore d'évaluation
- HtKe (1e) PDFDocument120 pagesHtKe (1e) PDFRajat KaliaPas encore d'évaluation
- Foundations of MechanicsDocument21 pagesFoundations of MechanicsUriel MorenoPas encore d'évaluation
- 0625 s14 QP 33 PDFDocument20 pages0625 s14 QP 33 PDFHaider AliPas encore d'évaluation
- Stephen Hawking: The Life and Times ofDocument7 pagesStephen Hawking: The Life and Times ofde sisilPas encore d'évaluation
- SPM 1449 2006 Mathematics p2 BerjawapanDocument18 pagesSPM 1449 2006 Mathematics p2 Berjawapanpss smk selandar71% (7)