Vous aimerez peut-être aussi
- Department of Electrical Engineering Electical & Electronics Measurement Question BankDocument4 pagesDepartment of Electrical Engineering Electical & Electronics Measurement Question Bankvijay patilPas encore d'évaluation
- Ee CT1 - Set 1Document1 pageEe CT1 - Set 1vijay patilPas encore d'évaluation
- IAC Assignment 01Document1 pageIAC Assignment 01vijay patilPas encore d'évaluation
- IAC Assignment 01Document1 pageIAC Assignment 01vijay patilPas encore d'évaluation
- Guardian File EE Dept Contents S1 Sem IIIDocument1 pageGuardian File EE Dept Contents S1 Sem IIIvijay patilPas encore d'évaluation
- Monthly Progress EE03 GroupDocument8 pagesMonthly Progress EE03 Groupvijay patilPas encore d'évaluation
- NT Assignment-01Document1 pageNT Assignment-01vijay patilPas encore d'évaluation
- NT Assignment-03Document1 pageNT Assignment-03vijay patilPas encore d'évaluation
- Network Theory Tutorial CO2 Kirchhoff's LawsDocument1 pageNetwork Theory Tutorial CO2 Kirchhoff's Lawsvijay patilPas encore d'évaluation
- Monthly Progress EE09 GroupDocument8 pagesMonthly Progress EE09 Groupvijay patilPas encore d'évaluation
- MSCED Assignment-02Document1 pageMSCED Assignment-02vijay patilPas encore d'évaluation
- Couse File Documents23Document73 pagesCouse File Documents23vijay patilPas encore d'évaluation
- Msced Ct1-Set 2Document1 pageMsced Ct1-Set 2vijay patilPas encore d'évaluation
- Msced Ct1-Set 1Document1 pageMsced Ct1-Set 1vijay patilPas encore d'évaluation
- Monthly Progress EE01 GroupDocument8 pagesMonthly Progress EE01 Groupvijay patilPas encore d'évaluation
- Project NoticesDocument8 pagesProject Noticesvijay patilPas encore d'évaluation
- EEM Assignment 01Document1 pageEEM Assignment 01vijay patilPas encore d'évaluation
- Presentation Schedule-2022UPDATEDDocument13 pagesPresentation Schedule-2022UPDATEDvijay patilPas encore d'évaluation
- Ct1 Eem Set2Document2 pagesCt1 Eem Set2vijay patilPas encore d'évaluation
- 283 - EEM LAb Manual-MadhabDocument27 pages283 - EEM LAb Manual-MadhabECE DepartmentPas encore d'évaluation
- PP-2022 Guide AllotmentDocument1 pagePP-2022 Guide Allotmentvijay patilPas encore d'évaluation
- Lab AdequacyDocument14 pagesLab Adequacyvijay patilPas encore d'évaluation
- EEM Assignment 02Document2 pagesEEM Assignment 02vijay patilPas encore d'évaluation
- CT1 EemDocument2 pagesCT1 Eemvijay patilPas encore d'évaluation
- Eem Midsem 2Document2 pagesEem Midsem 2vijay patilPas encore d'évaluation
- Eem Midsem 1Document3 pagesEem Midsem 1vijay patilPas encore d'évaluation
- Eem Midsem 3Document2 pagesEem Midsem 3vijay patilPas encore d'évaluation
- Ct1 Eem Set2Document2 pagesCt1 Eem Set2vijay patilPas encore d'évaluation
- CT1 EemDocument2 pagesCT1 Eemvijay patilPas encore d'évaluation
- EEM Assignment 01Document1 pageEEM Assignment 01vijay patilPas encore d'évaluation
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (265)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (119)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- 1 (6383)Document9 pages1 (6383)FernandoValdezCasillasPas encore d'évaluation
- Matlab QuestionsDocument9 pagesMatlab QuestionsNimal_V_Anil_2526100% (2)
- UoK Chemical Engineering Process Control SyllabusDocument46 pagesUoK Chemical Engineering Process Control SyllabusHusna ElatabaniPas encore d'évaluation
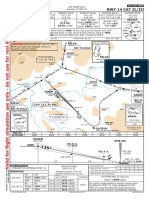
- LSZH App1 Ils14 PDFDocument1 pageLSZH App1 Ils14 PDFRadu Andrei MalicaPas encore d'évaluation
- A Guide To Motion Control Technology Systems and Programming Issue - 2lowres PDFDocument68 pagesA Guide To Motion Control Technology Systems and Programming Issue - 2lowres PDFferiferiPas encore d'évaluation
- Lec 11Document18 pagesLec 11uday singh meenaPas encore d'évaluation
- DSP-Chapter3 Student 08022017Document49 pagesDSP-Chapter3 Student 08022017Thành Vinh PhạmPas encore d'évaluation
- List of authors and papersDocument6 pagesList of authors and papersFanilo RazafindralamboPas encore d'évaluation
- Dynamic System Modeling BookDocument620 pagesDynamic System Modeling BookTanesan Wyot100% (1)
- Design Modeling and Fabrication of Twin Rotor Control SystemDocument68 pagesDesign Modeling and Fabrication of Twin Rotor Control SystemanampxPas encore d'évaluation
- Omron 3g3iv Parametros Validos para Microsimplex y MicrobasicDocument30 pagesOmron 3g3iv Parametros Validos para Microsimplex y MicrobasicReynold SuarezPas encore d'évaluation
- Parks-McClellan FIR Filter Design Using Remez Exchange AlgorithmDocument25 pagesParks-McClellan FIR Filter Design Using Remez Exchange Algorithmpiyush90ePas encore d'évaluation
- Control of Axially Moving Systems ReviewDocument27 pagesControl of Axially Moving Systems Reviewha louisPas encore d'évaluation
- Assignment-1 Sub: Basic Electronics SUB CODE: 2110016Document15 pagesAssignment-1 Sub: Basic Electronics SUB CODE: 2110016khyatichavdaPas encore d'évaluation
- Controlling An Inverted Pendulum Using S PDFDocument34 pagesControlling An Inverted Pendulum Using S PDFMiguel Angel ArruaPas encore d'évaluation
- A 1.92 GHZ Charge Pump PLL Using 45Nm Cmos TechnologyDocument5 pagesA 1.92 GHZ Charge Pump PLL Using 45Nm Cmos TechnologyTrần Tấn ĐạiPas encore d'évaluation
- Adaptive Neuro-Fuzzy Control for HVDC SystemsDocument13 pagesAdaptive Neuro-Fuzzy Control for HVDC SystemsJaya PriyaPas encore d'évaluation
- DC Motor PI ControllerDocument6 pagesDC Motor PI ControllerPooja MaathPas encore d'évaluation
- 6sl3210 1se17 7ua0 Sinamics Power Module 340 Siemens ManualDocument10 pages6sl3210 1se17 7ua0 Sinamics Power Module 340 Siemens Manualolujanz100% (1)
- Lecture 10. P-F Control 2016 PDFDocument120 pagesLecture 10. P-F Control 2016 PDFareseuroPas encore d'évaluation
- Isaacs. Differential GamesDocument13 pagesIsaacs. Differential GamescrovaxIIIPas encore d'évaluation
- New Step Servo Driver-DL86H Manual: CatalogDocument7 pagesNew Step Servo Driver-DL86H Manual: CatalogKacper GorajPas encore d'évaluation
- Opmac Laser Gauge Specs and Operation ManualDocument55 pagesOpmac Laser Gauge Specs and Operation Manualrahul_2005Pas encore d'évaluation
- Closed-Loop-Controlled, High-Speed Induction Generators Using Adaptive Control TechniqueDocument7 pagesClosed-Loop-Controlled, High-Speed Induction Generators Using Adaptive Control TechniqueBook4AllPas encore d'évaluation
- Active Magnetic BearingsDocument20 pagesActive Magnetic BearingsBalu Prakash100% (2)
- Binder 1Document8 pagesBinder 1Devilman_2Pas encore d'évaluation
- Chaptetr 1 Solution Steven M KAYDocument4 pagesChaptetr 1 Solution Steven M KAYMuhammad Usman IqbalPas encore d'évaluation
- Lab 5Document3 pagesLab 5ksajjPas encore d'évaluation
- CAMBRIAN COLLEGE ELECTRICAL ENGINEERING TECHNOLOGY INSTRUMENTATION TESTDocument16 pagesCAMBRIAN COLLEGE ELECTRICAL ENGINEERING TECHNOLOGY INSTRUMENTATION TESTGabrielGrecoPas encore d'évaluation
- Temperature Control and Heater Failure Detection with ESM-XX50 Series ControllersDocument3 pagesTemperature Control and Heater Failure Detection with ESM-XX50 Series ControllersHugh MantaPas encore d'évaluation