Vous aimerez peut-être aussi
- BIM162 Example Problem W/ Solution & Comments: Energy of Electrostatic Interaction Between A Dipole and A ChargeDocument3 pagesBIM162 Example Problem W/ Solution & Comments: Energy of Electrostatic Interaction Between A Dipole and A Chargekopaka900Pas encore d'évaluation
- Trig Cheat Sheet GuideDocument5 pagesTrig Cheat Sheet GuideArn Stefhan JimenezPas encore d'évaluation
- 97 Spring MidtermDocument6 pages97 Spring Midterm葉百祥Pas encore d'évaluation
- Plasmonics Sensor Phase and Amplitude TheoryDocument77 pagesPlasmonics Sensor Phase and Amplitude TheoryAndreas NeoPas encore d'évaluation
- UNIT - 1 Differential Calculus 1 (21MA1BSCDE) 2021-22Document7 pagesUNIT - 1 Differential Calculus 1 (21MA1BSCDE) 2021-22Jai VishnuPas encore d'évaluation
- Reference Trigonometry IdentitiesDocument2 pagesReference Trigonometry IdentitiesPETERPas encore d'évaluation
- Engine 2Document7 pagesEngine 2pilas_nikolaPas encore d'évaluation
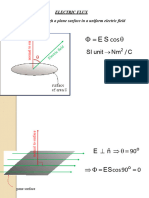
- ELECTRIC FLUX 1 Chapter1 04Document57 pagesELECTRIC FLUX 1 Chapter1 04Shubham TiwariPas encore d'évaluation
- Compatibility in Polar SDocument7 pagesCompatibility in Polar Skiran868626Pas encore d'évaluation
- Rmfe20 - 2 - 020213Document6 pagesRmfe20 - 2 - 020213Martinez Galindo Axel MiguelPas encore d'évaluation
- Gibbs & Apell EquationsDocument9 pagesGibbs & Apell EquationsYeizerPas encore d'évaluation
- Delta RobotDocument3 pagesDelta RobotVũ Huy HoàngPas encore d'évaluation
- Orbital Mechanics MATLAB Lambert's ProblemDocument24 pagesOrbital Mechanics MATLAB Lambert's ProblempclaudePas encore d'évaluation
- CE 328B - Advance Engineering Math For CE: - Course Policies & Overview - Trigonometric Form of Complex NumbersDocument37 pagesCE 328B - Advance Engineering Math For CE: - Course Policies & Overview - Trigonometric Form of Complex NumbersJohnnette AggabaoPas encore d'évaluation
- JEE Advanced Straight Line Important QuestionsDocument19 pagesJEE Advanced Straight Line Important Questionsharigallery9Pas encore d'évaluation
- PWM Current Source ConvertersDocument21 pagesPWM Current Source ConvertersJordi El MariachetPas encore d'évaluation
- Polar CoordinatesDocument26 pagesPolar CoordinatesWASEEM_AKHTER50% (2)
- Demoivres TheoremDocument10 pagesDemoivres TheoremExcel Edson ChibaPas encore d'évaluation
- Bessel & LegendreDocument57 pagesBessel & LegendreDembeoscarPas encore d'évaluation
- Vectors II Tutorial 1 QnsDocument6 pagesVectors II Tutorial 1 Qnslbwnb.68868Pas encore d'évaluation
- Angular Momentum States of Three p-ElectronsDocument2 pagesAngular Momentum States of Three p-ElectronsAlberto SandPas encore d'évaluation
- 2.1 Complex Maths and Laplace Transform ReviewDocument31 pages2.1 Complex Maths and Laplace Transform ReviewDawa PenjorPas encore d'évaluation
- Vector Method For The Synthesis of MechanismsDocument12 pagesVector Method For The Synthesis of MechanismsBilal OraikPas encore d'évaluation
- Unit 4 - Mathematics III - WWW - Rgpvnotes.inDocument30 pagesUnit 4 - Mathematics III - WWW - Rgpvnotes.inK2 CREATIONPas encore d'évaluation
- Quantum Numbers and Electron ConfigurationsDocument16 pagesQuantum Numbers and Electron ConfigurationsMARVIN OTHELLO MELCHOR DAUISPas encore d'évaluation
- Chapter 4 - Critical Speed of ShaftDocument30 pagesChapter 4 - Critical Speed of ShaftDrvPas encore d'évaluation
- Chapter3 FluidDocument11 pagesChapter3 FluidOrlando RomeroPas encore d'évaluation
- M3Document15 pagesM3ajay.rocks ajay.rocksPas encore d'évaluation
- Tampines Prelim 2009 Am 1Document6 pagesTampines Prelim 2009 Am 1JASON_INGHAMPas encore d'évaluation
- Rigid Body Kinematics Assignment ProblemsDocument5 pagesRigid Body Kinematics Assignment Problemsdeshdeepak13Pas encore d'évaluation
- Rotation Matrices and QuaternionsDocument11 pagesRotation Matrices and QuaternionsAleksa TrifkovićPas encore d'évaluation
- Jest 2016 PhysicsDocument7 pagesJest 2016 PhysicsKritiraj KalitaPas encore d'évaluation
- Inverse Trig Func2Document26 pagesInverse Trig Func2Janella Joyce AsinasPas encore d'évaluation
- SOL. Vector (PART 3)Document10 pagesSOL. Vector (PART 3)devli falduPas encore d'évaluation
- Notes 13 EMfieldDocument5 pagesNotes 13 EMfieldSwetha NagarajanPas encore d'évaluation
- Position Kinematics: We Choose The Robot Fish Has 3 Joints and 3 LinksDocument12 pagesPosition Kinematics: We Choose The Robot Fish Has 3 Joints and 3 LinksminhkhoaPas encore d'évaluation
- ARO 404-2 High Speed AerodynamicsDocument61 pagesARO 404-2 High Speed AerodynamicsOscar CruzPas encore d'évaluation
- 15 12 18 JR - Ipl Ic Jee Main WTM 22 Q.paperDocument14 pages15 12 18 JR - Ipl Ic Jee Main WTM 22 Q.paperZhugzhuang ZuryPas encore d'évaluation
- Solutions of Practice Questions: R X y y XDocument40 pagesSolutions of Practice Questions: R X y y XJibran HayatPas encore d'évaluation
- Mathematics: Grade 12Document18 pagesMathematics: Grade 12Sandiso MdluliPas encore d'évaluation
- Converting An ECI State Vector To Hyperbolic CoordinatesDocument5 pagesConverting An ECI State Vector To Hyperbolic CoordinatesAnonymous REw1YIq4q7Pas encore d'évaluation
- Dynamic PMSM ModellingDocument24 pagesDynamic PMSM Modellingdirekap280Pas encore d'évaluation
- Solutions To Paper - 3 Physics: 1 V V I 2 R R / 2 3R V I 2RDocument11 pagesSolutions To Paper - 3 Physics: 1 V V I 2 R R / 2 3R V I 2Rabid azizPas encore d'évaluation
- GFD I Problem Set 2 SolutionsDocument4 pagesGFD I Problem Set 2 SolutionskazoncaPas encore d'évaluation
- This Study Resource WasDocument9 pagesThis Study Resource WasbhattaramrevanthPas encore d'évaluation
- Pulse Propagation Along Close Conductors: Numerical Solution of The Telegraph Equations Using MathematicaDocument60 pagesPulse Propagation Along Close Conductors: Numerical Solution of The Telegraph Equations Using MathematicasyedshahabudeenPas encore d'évaluation
- Document From Souparno DuttaDocument18 pagesDocument From Souparno Duttasouparna dutta100% (1)
- AMKSS 4E A Math Mid-Year Exam 2010, 4038/01Document5 pagesAMKSS 4E A Math Mid-Year Exam 2010, 4038/01Timothy HandokoPas encore d'évaluation
- Modeling Frequency Domain with Transfer FunctionsDocument3 pagesModeling Frequency Domain with Transfer FunctionsJonathan Ochoa PazPas encore d'évaluation
- Week 4 Vector Fields and Line IntegralsDocument28 pagesWeek 4 Vector Fields and Line Integralsafifah masromPas encore d'évaluation
- Solving the Laplace Equation in Spherical CoordinatesDocument24 pagesSolving the Laplace Equation in Spherical CoordinatesFarooqAhmadLashariPas encore d'évaluation
- Lecture6 Potential-Wells Note-TakingDocument23 pagesLecture6 Potential-Wells Note-TakingkkkPas encore d'évaluation
- 2 - Chapter Two - Curviilinear MotionDocument18 pages2 - Chapter Two - Curviilinear MotionKHALED WALEDPas encore d'évaluation
- Accepted For Publication in American Journal of Physics On August 12, 2011Document8 pagesAccepted For Publication in American Journal of Physics On August 12, 2011Hichem AbPas encore d'évaluation
- Rutherford ScatteringDocument9 pagesRutherford ScatteringDedy KrisnaPas encore d'évaluation
- Gate 2018 PHDocument7 pagesGate 2018 PHPasupuleti AnilPas encore d'évaluation
- AME 352 Analytical KinematicsDocument13 pagesAME 352 Analytical Kinematics27AlokKumarPas encore d'évaluation
- Tables of Racah Coefficients: Mathematical Tables SeriesD'EverandTables of Racah Coefficients: Mathematical Tables SeriesPas encore d'évaluation
- Tables of the Function w (z)- e-z2 ? ex2 dx: Mathematical Tables Series, Vol. 27D'EverandTables of the Function w (z)- e-z2 ? ex2 dx: Mathematical Tables Series, Vol. 27Pas encore d'évaluation
- Computer Methods For Aerospace Trajectory OptimizationDocument468 pagesComputer Methods For Aerospace Trajectory OptimizationAnonymous REw1YIq4q7Pas encore d'évaluation
- Computer Methods For Orbit TransferDocument344 pagesComputer Methods For Orbit TransferAnonymous REw1YIq4q7Pas encore d'évaluation
- Selenocentric Coordinates and TransformationsDocument9 pagesSelenocentric Coordinates and TransformationsAnonymous REw1YIq4q7Pas encore d'évaluation
- Two Maneuver, Finite-Burn Trajectory OptimizationDocument35 pagesTwo Maneuver, Finite-Burn Trajectory OptimizationAnonymous REw1YIq4q7Pas encore d'évaluation
- Computer Methods For TransEarth TCM Delta-V Design and OptimizationDocument12 pagesComputer Methods For TransEarth TCM Delta-V Design and OptimizationAnonymous REw1YIq4q7Pas encore d'évaluation
- A MATLAB Script For Propagating Interplanetary Trajectories From Earth To MarsDocument36 pagesA MATLAB Script For Propagating Interplanetary Trajectories From Earth To MarsAnonymous REw1YIq4q7Pas encore d'évaluation
- Lunar Mission AnalysisDocument270 pagesLunar Mission AnalysisAnonymous REw1YIq4q7Pas encore d'évaluation
- Computer Methods For Lunar Mission AnalysisDocument422 pagesComputer Methods For Lunar Mission AnalysisAnonymous REw1YIq4q7Pas encore d'évaluation
- Orbit Theory and ApplicationDocument246 pagesOrbit Theory and ApplicationPeacefulLionPas encore d'évaluation
- Pre-Flight Interplanetary Mission AnalysisDocument56 pagesPre-Flight Interplanetary Mission AnalysisAnonymous REw1YIq4q7Pas encore d'évaluation
- Finite-Burn, Earth Orbit Rendezvous Trajectory OptimizationDocument30 pagesFinite-Burn, Earth Orbit Rendezvous Trajectory OptimizationAnonymous REw1YIq4q7Pas encore d'évaluation
- Atmospheric Reentry Trajectory OptimizationDocument30 pagesAtmospheric Reentry Trajectory OptimizationAnonymous REw1YIq4q7Pas encore d'évaluation
- The Gravity Perturbed Hohmann TransferDocument27 pagesThe Gravity Perturbed Hohmann TransferAnonymous REw1YIq4q7Pas encore d'évaluation
- A MATLAB Script For Propagating Trajectories From The Earth To The MoonDocument33 pagesA MATLAB Script For Propagating Trajectories From The Earth To The MoonAnonymous REw1YIq4q7Pas encore d'évaluation
- A Computer Program For Patched-Conic, Ballistic Interplanetary Trajectory Design and Optimization (Fortran)Document32 pagesA Computer Program For Patched-Conic, Ballistic Interplanetary Trajectory Design and Optimization (Fortran)Anonymous REw1YIq4q7Pas encore d'évaluation
- Creating Pork Chop Plots of Ballistic Earth-to-Mars Trajectories (Fortran)Document23 pagesCreating Pork Chop Plots of Ballistic Earth-to-Mars Trajectories (Fortran)Anonymous REw1YIq4q7Pas encore d'évaluation
- A Computer Program For Designing Interplanetary Injection Trajectories (MATLAB)Document10 pagesA Computer Program For Designing Interplanetary Injection Trajectories (MATLAB)Anonymous REw1YIq4q7Pas encore d'évaluation
- Low-Thrust Interplanetary Trajectory OptimizationDocument52 pagesLow-Thrust Interplanetary Trajectory OptimizationAnonymous REw1YIq4q7Pas encore d'évaluation
- A Computer Program For Parametric Analysis of Ballistic Earth To Mars TrajectoriesDocument17 pagesA Computer Program For Parametric Analysis of Ballistic Earth To Mars TrajectoriesAnonymous REw1YIq4q7Pas encore d'évaluation
- Lunar Ascent Trajectory OptimizationDocument30 pagesLunar Ascent Trajectory OptimizationAnonymous REw1YIq4q7Pas encore d'évaluation
- Generalized Linear Targeting and GuidanceDocument11 pagesGeneralized Linear Targeting and GuidanceAnonymous REw1YIq4q7Pas encore d'évaluation
- The Gravity Perturbed Hohmann TransferDocument24 pagesThe Gravity Perturbed Hohmann TransferAnonymous REw1YIq4q7Pas encore d'évaluation
- Earth-to-Mars Mission Design (Fortran)Document50 pagesEarth-to-Mars Mission Design (Fortran)Anonymous REw1YIq4q7Pas encore d'évaluation
- Two-Body Partial DerivativesDocument6 pagesTwo-Body Partial DerivativesAnonymous REw1YIq4q7Pas encore d'évaluation
- A MATLAB Script For Creating Pork Chop Plots of Ballistic Earth-to-Mars TrajectoriesDocument15 pagesA MATLAB Script For Creating Pork Chop Plots of Ballistic Earth-to-Mars TrajectoriesAnonymous REw1YIq4q7Pas encore d'évaluation
- A Computer Program For Patched-Conic, Ballistic Interplanetary Trajectory Design and Optimization (Fortran)Document32 pagesA Computer Program For Patched-Conic, Ballistic Interplanetary Trajectory Design and Optimization (Fortran)Anonymous REw1YIq4q7Pas encore d'évaluation
- Targeting With Modified Equinoctial Orbital ElementsDocument4 pagesTargeting With Modified Equinoctial Orbital ElementsAnonymous REw1YIq4q7Pas encore d'évaluation
- Creating Pork Chop Plots of Ballistic Earth-to-Mars Trajectories (Fortran)Document23 pagesCreating Pork Chop Plots of Ballistic Earth-to-Mars Trajectories (Fortran)Anonymous REw1YIq4q7Pas encore d'évaluation
- Optimal Finite-Burn Earth Orbit-to-Interplanetary InjectionDocument46 pagesOptimal Finite-Burn Earth Orbit-to-Interplanetary InjectionAnonymous REw1YIq4q7Pas encore d'évaluation
- SOR 8th Ed 2013Document467 pagesSOR 8th Ed 2013Durgesh Govil100% (3)
- Innovative Food Science and Emerging TechnologiesDocument6 pagesInnovative Food Science and Emerging TechnologiesAnyelo MurilloPas encore d'évaluation
- Artifact and Thingamy by David MitchellDocument8 pagesArtifact and Thingamy by David MitchellPedro PriorPas encore d'évaluation
- Fraktur Dentoalevolar (Yayun)Document22 pagesFraktur Dentoalevolar (Yayun)Gea RahmatPas encore d'évaluation
- BCP-8000 User's ManualDocument36 pagesBCP-8000 User's ManualAsad PatelPas encore d'évaluation
- ProtectionDocument160 pagesProtectionSuthep NgamlertleePas encore d'évaluation
- 7890 Parts-Guide APDocument4 pages7890 Parts-Guide APZia HaqPas encore d'évaluation
- Asian Paints Tile Grout Cement BasedDocument2 pagesAsian Paints Tile Grout Cement Basedgirish sundarPas encore d'évaluation
- BMW Motronic CodesDocument6 pagesBMW Motronic CodesxLibelle100% (3)
- CAE The Most Comprehensive and Easy-To-Use Ultrasound SimulatorDocument2 pagesCAE The Most Comprehensive and Easy-To-Use Ultrasound Simulatorjfrías_2Pas encore d'évaluation
- Conjoint Analysis Basic PrincipleDocument16 pagesConjoint Analysis Basic PrinciplePAglu JohnPas encore d'évaluation
- Theoretical and Actual CombustionDocument14 pagesTheoretical and Actual CombustionErma Sulistyo R100% (1)
- Apollo TyresDocument78 pagesApollo TyresADITYA33% (3)
- Lesson Plan: Lesson: Projectiles Without Air ResistanceDocument4 pagesLesson Plan: Lesson: Projectiles Without Air ResistanceeltytanPas encore d'évaluation
- Juan Martin Garcia System Dynamics ExercisesDocument294 pagesJuan Martin Garcia System Dynamics ExercisesxumuclePas encore d'évaluation
- Reiki BrochureDocument2 pagesReiki BrochureShikha AgarwalPas encore d'évaluation
- The Apu Trilogy - Robin Wood PDFDocument48 pagesThe Apu Trilogy - Robin Wood PDFSamkush100% (1)
- Certificate Testing ResultsDocument1 pageCertificate Testing ResultsNisarg PandyaPas encore d'évaluation
- Steam Turbines: ASME PTC 6-2004Document6 pagesSteam Turbines: ASME PTC 6-2004Dena Adi KurniaPas encore d'évaluation
- Laser Surface Treatment ProcessesDocument63 pagesLaser Surface Treatment ProcessesDIPAK VINAYAK SHIRBHATEPas encore d'évaluation
- Letter of MotivationDocument4 pagesLetter of Motivationjawad khalidPas encore d'évaluation
- Cs8791 Cloud Computing Unit2 NotesDocument37 pagesCs8791 Cloud Computing Unit2 NotesTeju MelapattuPas encore d'évaluation
- 1010 PDS WLBP 170601-EN PDFDocument4 pages1010 PDS WLBP 170601-EN PDFIan WoodsPas encore d'évaluation
- KAC-8102D/8152D KAC-9102D/9152D: Service ManualDocument18 pagesKAC-8102D/8152D KAC-9102D/9152D: Service ManualGamerAnddsPas encore d'évaluation
- Ricoh 4055 PDFDocument1 280 pagesRicoh 4055 PDFPham Nguyen Hoang Minh100% (1)
- IEQ CompleteDocument19 pagesIEQ Completeharshal patilPas encore d'évaluation
- Emerson EPC48150 1800 FA1EPC48300 3200 FA1 V PDFDocument26 pagesEmerson EPC48150 1800 FA1EPC48300 3200 FA1 V PDFRicardo Andrés Soto Salinas RassPas encore d'évaluation
- Air Wellness QRSDocument2 pagesAir Wellness QRSapi-3743459Pas encore d'évaluation
- Stability Calculation of Embedded Bolts For Drop Arm Arrangement For ACC Location Inside TunnelDocument7 pagesStability Calculation of Embedded Bolts For Drop Arm Arrangement For ACC Location Inside TunnelSamwailPas encore d'évaluation
- Chain Surveying InstrumentsDocument5 pagesChain Surveying InstrumentsSachin RanaPas encore d'évaluation