Vous aimerez peut-être aussi
- Nonlinear Kalman Filter for Multi-Sensor Navigation of Unmanned Aerial Vehicles: Application to Guidance and Navigation of Unmanned Aerial Vehicles Flying in a Complex EnvironmentD'EverandNonlinear Kalman Filter for Multi-Sensor Navigation of Unmanned Aerial Vehicles: Application to Guidance and Navigation of Unmanned Aerial Vehicles Flying in a Complex EnvironmentPas encore d'évaluation
- Design and Experimental Comparison of PID, LQR and MPC MamboDocument21 pagesDesign and Experimental Comparison of PID, LQR and MPC MamboPedro Cezar Rodrigues BaltazarPas encore d'évaluation
- Design of Self-Tuning PID Controller Parameters Using Fuzzy Logic Controller For Quad-Rotor HelicopterDocument6 pagesDesign of Self-Tuning PID Controller Parameters Using Fuzzy Logic Controller For Quad-Rotor HelicopterZelalem TarekegnPas encore d'évaluation
- Octocopter SlidesDocument17 pagesOctocopter SlidesShoaib HassanPas encore d'évaluation
- Design and Implementation of Fractional Order PID Controller For Aerofin Control SystemDocument7 pagesDesign and Implementation of Fractional Order PID Controller For Aerofin Control SystemtranxuanminhPas encore d'évaluation
- A Survey On Open-Source Flight Control Platforms of Unmanned Aerial VehicleDocument7 pagesA Survey On Open-Source Flight Control Platforms of Unmanned Aerial Vehicle029Muhammad Robith Fikris SholihPas encore d'évaluation
- Design of Self-Tuning PID Controller Parameters Using Fuzzy Logic Controller For Quad-Rotor HelicopterDocument5 pagesDesign of Self-Tuning PID Controller Parameters Using Fuzzy Logic Controller For Quad-Rotor HelicopterGál Károly-IstvánPas encore d'évaluation
- DSP-Based Laboratory Implementation of Hybrid Fuzzy-PID Controller Using Genetic Optimization For High-Performance Motor DrivesDocument10 pagesDSP-Based Laboratory Implementation of Hybrid Fuzzy-PID Controller Using Genetic Optimization For High-Performance Motor DrivesJulián Peláez RestrepoPas encore d'évaluation
- Real-Time Embedded Control System For VTOL Aircrafts: Application To Stabilize A Quad-Rotor HelicopterDocument6 pagesReal-Time Embedded Control System For VTOL Aircrafts: Application To Stabilize A Quad-Rotor HelicopterasdssPas encore d'évaluation
- Mlat Concept PDFDocument19 pagesMlat Concept PDFMuhammad NaeemPas encore d'évaluation
- An Embedded Module For Driver Performance Assessment and Alert SystemDocument4 pagesAn Embedded Module For Driver Performance Assessment and Alert SystemNithin VardhanPas encore d'évaluation
- Speed Control of DC Motor Using Particle Swarm OptDocument9 pagesSpeed Control of DC Motor Using Particle Swarm OptThien MaiPas encore d'évaluation
- Fuzzy Control Strategies Development for a 3-DoF RoboticDocument30 pagesFuzzy Control Strategies Development for a 3-DoF RoboticMuhammad SulemanPas encore d'évaluation
- Self-Tuned PID Controller For The Aerosonde UAV AutopilotDocument13 pagesSelf-Tuned PID Controller For The Aerosonde UAV AutopilotboudibaPas encore d'évaluation
- Coombes 2014Document7 pagesCoombes 2014fydhdPas encore d'évaluation
- RFID Enabled Health Monitoring System For Aircraft Landing GearDocument10 pagesRFID Enabled Health Monitoring System For Aircraft Landing Gear759305169Pas encore d'évaluation
- Design and Development of Effective Manual Control System For Unmanned Air VehicleDocument6 pagesDesign and Development of Effective Manual Control System For Unmanned Air VehicleZeeshan AshrafPas encore d'évaluation
- Guidance and Control Algorithms For Mini UAV Autopilots: Elisa Capello and Giorgio Guglieri Gianluca RistortoDocument12 pagesGuidance and Control Algorithms For Mini UAV Autopilots: Elisa Capello and Giorgio Guglieri Gianluca Ristortooluwakayode olabanjiPas encore d'évaluation
- Alexandria Engineering Journal Implements Fractional CalculusDocument9 pagesAlexandria Engineering Journal Implements Fractional CalculusProsanto BiswasPas encore d'évaluation
- E1FLA5 2014 v14n2 136Document9 pagesE1FLA5 2014 v14n2 136tou kaiPas encore d'évaluation
- Drones 06 00263 v2Document18 pagesDrones 06 00263 v2Thien MaiPas encore d'évaluation
- Quadrotor Design, Trajectory Generation and ControlDocument8 pagesQuadrotor Design, Trajectory Generation and ControlTiến HồPas encore d'évaluation
- FMGaDocument7 pagesFMGaWilson Roberto Sanchez SolanoPas encore d'évaluation
- Department of Aeronautical Engineering, Sec Perambalur - 621212Document28 pagesDepartment of Aeronautical Engineering, Sec Perambalur - 621212murjass85Pas encore d'évaluation
- A Fuzzy Rule-Based Control System For Fast Line-Following RobotsDocument8 pagesA Fuzzy Rule-Based Control System For Fast Line-Following RobotsJithosh BabuPas encore d'évaluation
- 88 IjecsDocument15 pages88 IjecsMuhammad RamishPas encore d'évaluation
- DLSU ResCon 2017 Paper 110Document6 pagesDLSU ResCon 2017 Paper 110Ralph Laurence G VisayaPas encore d'évaluation
- Design and Implementation of Smart Traffic Light Controller Using VHDL LanguageDocument7 pagesDesign and Implementation of Smart Traffic Light Controller Using VHDL LanguageSenthil MuruganPas encore d'évaluation
- Design and Simulation of Longitudinal Autopilot Modes For A Conventional AircraftDocument7 pagesDesign and Simulation of Longitudinal Autopilot Modes For A Conventional AircraftDeniz Can ÇetinelPas encore d'évaluation
- GUI Controlled Aerial Drone: Kartik Panicker, Vaibhav Murkute, Deepak Padhi, Akash NarkhedeDocument3 pagesGUI Controlled Aerial Drone: Kartik Panicker, Vaibhav Murkute, Deepak Padhi, Akash NarkhedeerpublicationPas encore d'évaluation
- DLSU ResCon 2017 Paper 110Document6 pagesDLSU ResCon 2017 Paper 110Ralph Laurence Garcia VisayaPas encore d'évaluation
- Backstepping Approach For Design of PID Controller With Guaranteed Performance For Micro-Air UAVDocument15 pagesBackstepping Approach For Design of PID Controller With Guaranteed Performance For Micro-Air UAVDuy KhổngPas encore d'évaluation
- Design and ImplementationDocument4 pagesDesign and ImplementationInternational Journal of Innovative Science and Research TechnologyPas encore d'évaluation
- Fractional Order Fuzzy PID Controller For A Rotary Servo SystemDocument5 pagesFractional Order Fuzzy PID Controller For A Rotary Servo SystemAKU BUKAN SIAPA-SIAPAPas encore d'évaluation
- AvionicsDocument24 pagesAvionicsNambi Rajan100% (2)
- 2Tue4B Controlo18 Submission 2Document7 pages2Tue4B Controlo18 Submission 2Văn Nghĩa NguyễnPas encore d'évaluation
- Modeling and Control of 5DOF Robot Arm Using FuzzyDocument13 pagesModeling and Control of 5DOF Robot Arm Using FuzzyAjay RajPas encore d'évaluation
- Development of Flight Controller Using STM Microcontroller BoardDocument5 pagesDevelopment of Flight Controller Using STM Microcontroller BoardaeroacademicPas encore d'évaluation
- How Rapid TransferDocument9 pagesHow Rapid TransferSourabhYadavPas encore d'évaluation
- pidDocument9 pagespidcointoinPas encore d'évaluation
- Flight Control Lecture 3Document56 pagesFlight Control Lecture 3Sahil SahPas encore d'évaluation
- L1 adaptive control improves indoor drone flight performanceDocument17 pagesL1 adaptive control improves indoor drone flight performanceErickson OngPas encore d'évaluation
- Micro Autonomous Aerial Vehicles - ProposalDocument10 pagesMicro Autonomous Aerial Vehicles - Proposalapi-551754470Pas encore d'évaluation
- Design of Intelligent Braking System Using Fuzzy Logic ControllerDocument7 pagesDesign of Intelligent Braking System Using Fuzzy Logic ControllerSandeepkumar SgPas encore d'évaluation
- The Navigation and Control Technology Inside The AR - Drone Micro UAVDocument8 pagesThe Navigation and Control Technology Inside The AR - Drone Micro UAVSergio Camilo Vasquez PazPas encore d'évaluation
- LQR Based PID Controller Design For 3 DOF Helicopter SystemDocument6 pagesLQR Based PID Controller Design For 3 DOF Helicopter SystemwdgsPas encore d'évaluation
- Automated Real-Time Video Surveillance Algorithms For Soc Implementation: A SurveyDocument2 pagesAutomated Real-Time Video Surveillance Algorithms For Soc Implementation: A SurveyAnju BalaPas encore d'évaluation
- Hoffmann Et Al Quadrotor DASC04Document10 pagesHoffmann Et Al Quadrotor DASC04Damian ChmielewskiPas encore d'évaluation
- 1-s2.0-S026322411730324X-mainDocument14 pages1-s2.0-S026322411730324X-mainSanika RasalPas encore d'évaluation
- Flight Control of A 1-DOF Helicopter System Using A Sliding Mode Controller For Disturbance RejectionDocument7 pagesFlight Control of A 1-DOF Helicopter System Using A Sliding Mode Controller For Disturbance RejectionfsdvPas encore d'évaluation
- Steps Towards Scalable and Modularized F PDFDocument11 pagesSteps Towards Scalable and Modularized F PDFJose SantosPas encore d'évaluation
- algorithms-16-00035-v2Document2 pagesalgorithms-16-00035-v2KAMELPas encore d'évaluation
- A Research Proposal Aerodynamic Design and Analysis of Medical Delivery DroneDocument5 pagesA Research Proposal Aerodynamic Design and Analysis of Medical Delivery DroneKamal Darlami100% (1)
- Development and Implementation of A New Adaptive Intelligent Speed Controller For IPMSM DriveDocument10 pagesDevelopment and Implementation of A New Adaptive Intelligent Speed Controller For IPMSM DriveJose Leonardo Simancas GarciaPas encore d'évaluation
- Trajectory Path Control of Multiple Unmanned Aerial VehiclesDocument4 pagesTrajectory Path Control of Multiple Unmanned Aerial VehiclesdormentryPas encore d'évaluation
- Fpga Based Radar Signal Processing For Automotive DriverDocument22 pagesFpga Based Radar Signal Processing For Automotive DriverhemanthhemanthPas encore d'évaluation
- Design of Intelligent Braking System: February 2000Document7 pagesDesign of Intelligent Braking System: February 2000Nihal RajPas encore d'évaluation
- A WSN Solution For Light Aircraft Pilot Health MonitoringDocument6 pagesA WSN Solution For Light Aircraft Pilot Health MonitoringAmulya AnuragPas encore d'évaluation
- 10 PIDControlKnospeDocument3 pages10 PIDControlKnospeWarren Dhez FortunatoPas encore d'évaluation
- GSM Based Arial Photography Using Remote Flying RobotDocument4 pagesGSM Based Arial Photography Using Remote Flying RobotseventhsensegroupPas encore d'évaluation
- RFID Tag Designs for Cheese TraceabilityDocument2 pagesRFID Tag Designs for Cheese TraceabilityMahesh MahiPas encore d'évaluation
- 500 Java Technical QuestionsDocument12 pages500 Java Technical Questionsutkarsh9807Pas encore d'évaluation
- Count UpDocument1 pageCount UpMahesh MahiPas encore d'évaluation
- GATE 2019 Mail Queries and Answers - FinalDocument2 pagesGATE 2019 Mail Queries and Answers - FinalAjay GoelPas encore d'évaluation
- Indian Leather IndustryDocument19 pagesIndian Leather IndustryMahesh MahiPas encore d'évaluation
- RFIDDocument2 pagesRFIDMahesh MahiPas encore d'évaluation
- F Power WritingDocument19 pagesF Power WritingSutan Andreas Parlindungan HutaurukPas encore d'évaluation
- Indian Leather IndustryDocument10 pagesIndian Leather IndustryMohammed BilalPas encore d'évaluation
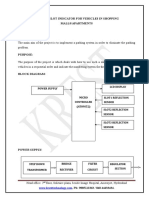
- Parking Slot Indicator For Vehicles in Shopping MallsapartmentsDocument3 pagesParking Slot Indicator For Vehicles in Shopping MallsapartmentsMahesh MahiPas encore d'évaluation
- E SpartanDocument227 pagesE SpartanCamilo MahechaPas encore d'évaluation
- Improved Traceability Solution Based On UHF RFID For Cheese Production SectorDocument5 pagesImproved Traceability Solution Based On UHF RFID For Cheese Production SectorMahesh MahiPas encore d'évaluation
- Improved Traceability Solution Based On UHF RFID For Cheese Production SectorDocument5 pagesImproved Traceability Solution Based On UHF RFID For Cheese Production SectorMahesh MahiPas encore d'évaluation
- Intelligent Lighting System Railway PlatformsDocument3 pagesIntelligent Lighting System Railway PlatformsMahesh MahiPas encore d'évaluation
- ReadmeDocument1 pageReadmeMahesh MahiPas encore d'évaluation
- GSM DustbinDocument2 pagesGSM DustbinMahesh MahiPas encore d'évaluation
- GSM DustbinDocument2 pagesGSM DustbinMahesh MahiPas encore d'évaluation
- GSM DustbinDocument2 pagesGSM DustbinMahesh MahiPas encore d'évaluation
- GSM DustbinDocument2 pagesGSM DustbinMahesh MahiPas encore d'évaluation
- GSM DustbinDocument2 pagesGSM DustbinMahesh MahiPas encore d'évaluation
- High Bit Rate Digital Subscriber Lines: Review of HDSL ProgressDocument16 pagesHigh Bit Rate Digital Subscriber Lines: Review of HDSL ProgressAhmed HamoudaPas encore d'évaluation
- Internet Sathi Programme in UP: PACS Team With Women Trained by Internet Saathis in Village BhagwanpurDocument9 pagesInternet Sathi Programme in UP: PACS Team With Women Trained by Internet Saathis in Village Bhagwanpurkareena pooniaPas encore d'évaluation
- 10 Coding Principles PDFDocument6 pages10 Coding Principles PDFnarendra_mahajanPas encore d'évaluation
- 2007 03 HubDocument46 pages2007 03 HubthecomputerpaperPas encore d'évaluation
- Finite Fields: 1.1 DefinitionsDocument12 pagesFinite Fields: 1.1 DefinitionsPriyanshu RajputPas encore d'évaluation
- Introduction To Asymptotic AnalysisDocument32 pagesIntroduction To Asymptotic AnalysisSagor AhmedPas encore d'évaluation
- OFF Grid Solar PCU Manual: India's First 5 Mode Solar InverterDocument35 pagesOFF Grid Solar PCU Manual: India's First 5 Mode Solar InverterV'nay KuMarPas encore d'évaluation
- Module 16 - Event MonitoringDocument16 pagesModule 16 - Event Monitoringsatya kolliPas encore d'évaluation
- Seminar 3r PDFDocument38 pagesSeminar 3r PDFJoni Czarina AmoraPas encore d'évaluation
- 1.3: Newton's Method: MA385 - Numerical Analysis September 2019Document17 pages1.3: Newton's Method: MA385 - Numerical Analysis September 2019Bashar JawadPas encore d'évaluation
- 2024 05 Exam SRM SyllabusDocument6 pages2024 05 Exam SRM SyllabusAshish Kumar YadavPas encore d'évaluation
- WWW Scribd Com Document 565971169 Vikash Sharma Ip Project Class 12Document20 pagesWWW Scribd Com Document 565971169 Vikash Sharma Ip Project Class 12nightmare 17Pas encore d'évaluation
- 1-117 Ac Comp QuizDocument394 pages1-117 Ac Comp Quizmayank shukla100% (1)
- Applied Mathematics II: 47-Question Timed Test with Detailed InstructionsDocument97 pagesApplied Mathematics II: 47-Question Timed Test with Detailed InstructionsKhalid MeqdadPas encore d'évaluation
- R Datasheet Fi8170Document2 pagesR Datasheet Fi8170comunicacionecuacopiaPas encore d'évaluation
- ABB Positioner ManualDocument60 pagesABB Positioner ManualJohn SnowPas encore d'évaluation
- Assignment No. 01 SEMESTER: Spring 2020 CS403-Database Management System Question StatementDocument3 pagesAssignment No. 01 SEMESTER: Spring 2020 CS403-Database Management System Question StatementMarrayam MarrayamPas encore d'évaluation
- Unit1 DBMSDocument64 pagesUnit1 DBMSRaj SurasePas encore d'évaluation
- SFF-Agenda 0211 ST v3Document37 pagesSFF-Agenda 0211 ST v3Patrick DeacostaPas encore d'évaluation
- LCP ShsDocument11 pagesLCP ShsReaganRicafortPas encore d'évaluation
- GIStar User Guide PDFDocument37 pagesGIStar User Guide PDFmasterat0rPas encore d'évaluation
- GLOSSARYDocument21 pagesGLOSSARYDeibys LynchPas encore d'évaluation
- Movement Harmony Rhythm Repetition PatternDocument21 pagesMovement Harmony Rhythm Repetition PatternMichelle Jean GalvanPas encore d'évaluation
- Teje Handwriting Font - Webfont & Desktop - MyFontsDocument4 pagesTeje Handwriting Font - Webfont & Desktop - MyFontsLizbeth Fernanda AnavePas encore d'évaluation
- IT Graduate Seeks InternshipDocument1 pageIT Graduate Seeks Internshipyahia el-siraffyPas encore d'évaluation
- BEE Lab ManualDocument82 pagesBEE Lab ManualMuhammad Shoaib RabbaniPas encore d'évaluation
- Samsung UN50KU630DF Chassis UKU6000P PDFDocument170 pagesSamsung UN50KU630DF Chassis UKU6000P PDFsoms6571% (7)
- IBM 3592 VOL-SER Label and Initialization Order GuideDocument3 pagesIBM 3592 VOL-SER Label and Initialization Order Guidefarkli88Pas encore d'évaluation
- New Gateway To Computer Science 10Document289 pagesNew Gateway To Computer Science 10Labu Rai100% (1)
- Analysis and Design of 2-bit Magnitude Comparator and Multiplier CircuitsDocument9 pagesAnalysis and Design of 2-bit Magnitude Comparator and Multiplier CircuitsabhinavPas encore d'évaluation
- Chip War: The Quest to Dominate the World's Most Critical TechnologyD'EverandChip War: The Quest to Dominate the World's Most Critical TechnologyÉvaluation : 4.5 sur 5 étoiles4.5/5 (227)
- CompTIA A+ Complete Review Guide: Exam Core 1 220-1001 and Exam Core 2 220-1002D'EverandCompTIA A+ Complete Review Guide: Exam Core 1 220-1001 and Exam Core 2 220-1002Évaluation : 5 sur 5 étoiles5/5 (1)
- Chip War: The Fight for the World's Most Critical TechnologyD'EverandChip War: The Fight for the World's Most Critical TechnologyÉvaluation : 4.5 sur 5 étoiles4.5/5 (82)
- 8051 Microcontroller: An Applications Based IntroductionD'Everand8051 Microcontroller: An Applications Based IntroductionÉvaluation : 5 sur 5 étoiles5/5 (6)
- CompTIA A+ Complete Review Guide: Core 1 Exam 220-1101 and Core 2 Exam 220-1102D'EverandCompTIA A+ Complete Review Guide: Core 1 Exam 220-1101 and Core 2 Exam 220-1102Évaluation : 5 sur 5 étoiles5/5 (2)
- Amazon Web Services (AWS) Interview Questions and AnswersD'EverandAmazon Web Services (AWS) Interview Questions and AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (3)
- iPhone X Hacks, Tips and Tricks: Discover 101 Awesome Tips and Tricks for iPhone XS, XS Max and iPhone XD'EverandiPhone X Hacks, Tips and Tricks: Discover 101 Awesome Tips and Tricks for iPhone XS, XS Max and iPhone XÉvaluation : 3 sur 5 étoiles3/5 (2)
- Model-based System and Architecture Engineering with the Arcadia MethodD'EverandModel-based System and Architecture Engineering with the Arcadia MethodPas encore d'évaluation
- Dancing with Qubits: How quantum computing works and how it can change the worldD'EverandDancing with Qubits: How quantum computing works and how it can change the worldÉvaluation : 5 sur 5 étoiles5/5 (1)
- Creative Selection: Inside Apple's Design Process During the Golden Age of Steve JobsD'EverandCreative Selection: Inside Apple's Design Process During the Golden Age of Steve JobsÉvaluation : 4.5 sur 5 étoiles4.5/5 (49)
- 2018 (40+) Best Free Apps for Kindle Fire Tablets: +Simple Step-by-Step Guide For New Kindle Fire UsersD'Everand2018 (40+) Best Free Apps for Kindle Fire Tablets: +Simple Step-by-Step Guide For New Kindle Fire UsersPas encore d'évaluation
- Hacking With Linux 2020:A Complete Beginners Guide to the World of Hacking Using Linux - Explore the Methods and Tools of Ethical Hacking with LinuxD'EverandHacking With Linux 2020:A Complete Beginners Guide to the World of Hacking Using Linux - Explore the Methods and Tools of Ethical Hacking with LinuxPas encore d'évaluation
- From Cell Phones to VOIP: The Evolution of Communication Technology - Technology Books | Children's Reference & NonfictionD'EverandFrom Cell Phones to VOIP: The Evolution of Communication Technology - Technology Books | Children's Reference & NonfictionPas encore d'évaluation
- Electronic Dreams: How 1980s Britain Learned to Love the ComputerD'EverandElectronic Dreams: How 1980s Britain Learned to Love the ComputerÉvaluation : 5 sur 5 étoiles5/5 (1)
- Cancer and EMF Radiation: How to Protect Yourself from the Silent Carcinogen of ElectropollutionD'EverandCancer and EMF Radiation: How to Protect Yourself from the Silent Carcinogen of ElectropollutionÉvaluation : 5 sur 5 étoiles5/5 (2)
- The No Bull$#!£ Guide to Building Your Own PC: No Bull GuidesD'EverandThe No Bull$#!£ Guide to Building Your Own PC: No Bull GuidesPas encore d'évaluation